技術開発ニュース No.168
- ページ: 45
-
研 究 成 果
トである。一方でデメリットとしては、作業の都度、事前
点群マップの生成が必要なため、本来作業の支障とならな
いよう極力短時間で簡便に生成可能なことが要求される。
4
PC
性能検証
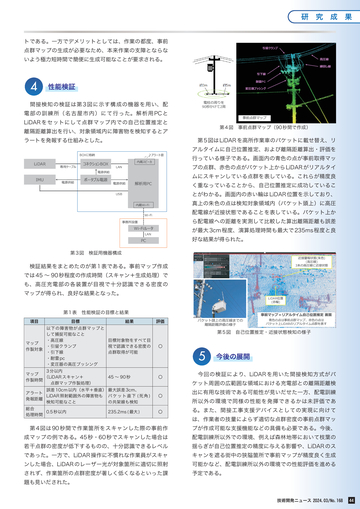
間接検知の検証は第 3 図に示す構成の機器を用い、配
電部の訓練所(名古屋市内)にて行った。解析用 PC と
90
LiDAR をセットにして点群マップ内での自己位置推定と
第 4 図 事前点群マップ(90 秒間で作成)
離隔距離算出を行い、対象領域内に障害物を検知するとア
第 5 図は LiDAR を高所作業車のバケットに載せ替え、リ
ラートを発報する仕組みとした。
アルタイムに自己位置推定、および離隔距離算出・評価を
BOX
LiDAR
2
BOX
行っている様子である。画面内の青色の点が事前取得マッ
プの点群、赤色の点がバケット上から LiDAR がリアルタイ
LAN
ムにスキャンしている点群を表している。これらが精度良
IMU
く重なっていることから、自己位置推定に成功しているこ
PC
とがわかる。画面内の赤い輪は LiDAR 位置を示しており、
USB
真上の朱色の点は検知対象領域内(バケット頭上)に高圧
Wi-Fi
配電線が近接状態であることを表している。バケット上か
Wi-Fi
ら配電線への距離を実測して比較した算出離隔距離も誤差
が最大 3cm 程度、演算処理時間も最大で 235ms 程度と良
Wi-Fi
LAN
好な結果が得られた。
PC
第 3 図 検証用機器構成
検証結果をまとめたのが第 1 表である。事前マップ作成
3
(
(
)
)
では 45 ~ 90 秒程度の作成時間(スキャン+生成処理)で
も、高圧充電部の各装置が目視で十分認識できる密度の
マップが得られ、良好な結果となった。
LiDAR
(
)
第 1 表 性能検証の目標と結果
項目
目標
結果
以下の障害物が点群マップと
して捕捉可能なこと
・高圧線
目標対象物をすべて目
マップ
・引留クランプ
視で認識できる密度の
作製対象
・引下線
点群取得が可能
・耐雷 pc
・変圧器の高圧ブッシング
3 分以内
マップ
(LiDAR スキャン+
作製時間
点群マップ作製処理)
45 ~ 90 秒
誤差 10cm 以内(水平+垂直) 最大誤差 3cm、
アラート
LiDAR 照射範囲外の障害物も バ ケ ッ ト 直 下 ( 死 角 )
発報距離
の共架線も検知
検知可能なこと
総合
0.5 秒以内
処理時間
235.2ms( 最大 )
評価
LiDAR
第 5 図 自己位置推定・近接状態検知の様子
〇
〇
〇
〇
5
今後の展開
今回の検証により、LiDAR を用いた間接検知方式がバ
ケット周囲の広範囲な領域における充電部との離隔距離検
出に有用な技術である可能性が見いだせた一方、配電訓練
所以外の環境で同様の性能を発揮できるかは未評価であ
る。また、間接工事支援デバイスとしての実現に向けて
は、作業者の技量によらず適切な点群密度の事前点群マッ
第 4 図は 90 秒間で作業箇所をスキャンした際の事前作
プが作成可能な支援機能などの具備も必要である。今後、
成マップの例である。45 秒・60 秒でスキャンした場合は
配電訓練所以外での環境、例えば森林地帯において枝葉の
若干点群の密度が低下するものの、十分認識できるレベル
揺らぎが自己位置推定の精度に与える影響や、LiDAR のス
であった。一方で、LiDAR 操作に不慣れな作業員がスキャ
キャンを遮る街中の狭隘箇所で事前マップが精度良く生成
ンした場合、LiDAR のレーザー光が対象箇所に適切に照射
可能かなど、配電訓練所以外の環境での性能評価を進める
されず、作業箇所の点群密度が著しく低くなるといった課
予定である。
題も見いだされた。
技術開発ニュース 2024.03/No.168
44
�
- ▲TOP