技術開発ニュース No.168
- ページ: 1
- RESE ARCH AND DE VELOPMENT NEWS
技術開発
ニュース
巻 頭 言
働く仲間の安全と健康を守れる未来
トピックス
水素エネルギーキャリアとしてのアンモニアの可能性
特
デジタルによるものづくり共創プラットフォームの
構築と活用
集
特許紹介
中部電力3社が新たに取得した特許権
研究成果
誤切断防止用リングアタッチメント型
ケーブルカッターの開発
研究成果
VR技術を活用した安全教育支援アプリケーションの開発
研究成果
高熱環境下における放射測温システムの開発
研究成果
ドローンによる風力発電設備点検技術の開発
内 外ニュース
液式調湿空調機「モイストプロセッサー」が
中部科学技術センター奨励賞を受賞 など
2024-3
No.
168
�
- ▲TOP
- ページ: 3
-
CONTENTS
巻頭言
働く仲間の安全と健康を守れる未来 ───────────────────────────── 4
トピックス
水素エネルギーキャリアとしてのアンモニアの可能 ────────────────────── 5・6
特集
専務執行役員 秘書室 安全健康推進室統括 マネジメントサービス本部長 古田 真二
先端技術応用研究所 先端技術ソリューショングループ 神田 茂樹
デジタルによるものづくり共創プラットフォームの構築と活用
先端技術応用研究所 プロジェクト推進 G
───────────────── 7・8
特許紹介
中部電力3社が新たに取得した特許権 ─────────────────────────── 9・10
研究成果
真空バルブ式 SVRの劣化調査 ───────────────────────────── 11・12
VR 技術を活用した安全教育支援アプリケーションの開発 ────────────────── 13・14
誤切断防止用リングアタッチメント型ケーブルカッターの開発 ──────────────── 15・16
分割式特殊柱の開発
───────────────────────────────── 17・18
給電系共通プラットフォームの開発 ─────────────────────────── 19・20
復水器洗浄装置ボールカウンタの開発と精度向上 ───────────────────── 21・22
風車ダウンコンダクタ導通確認手法の開発 ──────────────────────── 23・24
水力発電所沈砂池の効率的な排砂形状の開発
────────────────────── 25・26
レーザー計測機が捉えた送電鉄塔下の雨滴特性と土壌侵食の実態 ────────────── 27・28
脱炭素対応アルミインゴット急速予熱装置の開発 ───────────────────── 29・30
工場スチームトラップの蒸気漏れ量簡易推算方法の考案
────────────────── 31・32
3Dカメラを用いたアルミ溶解炉操業の省エネ支援システムの開発 ────────────── 33・34
高熱環境下における放射測温システムの開発 ─────────────────────── 35・36
工場向けワイヤレス型オイルミスト濃度・温湿度計測システム「MieruTIME OILMIST」の開発
─ 37・38
ヒートポンプを用いた洗浄液加温システム「エコdeヒートEX」の開発 ──────────── 39・40
食品スーパーにおける天井カビ抑制効果の検証 ────────────────────── 41・42
高圧配電線・充電部の離隔距離検出技術の検証
───────────────────── 43・44
半教師あり学習画像 AI による生産品目判別・計量技術の検証 ──────────────── 45・46
送変電設備の教師無し学習による異常検出技術 ────────────────────── 47・48
ヒューマンエラー事象のテキストマイニング技術 ────────────────────── 49・50
音声対話の要約技術
───────────────────────────────── 51・52
AIを活用した『歩きスマホ検知装置』の内製構築 ───────────────────── 53・54
AIを活用した水力発電計画策定支援システムの開発 ──────────────────── 55・56
自然エネルギーを利用した小型独立電源装置の開発・実証 ─────────────────── 57
ドローンを用いた送電設備自動点検技術の開発 ──────────────────────── 58
ドローン Wi-Fi 無線中継システムの開発・実証
────────────────────── 59・60
ドローンによる風力発電設備点検技術の開発 ─────────────────────── 61・62
ヒートポンプを用いた
配電設備の
レーザー計測機が捉えた
洗浄液加温システム
3 次元データ取得のための
送電鉄塔下の雨滴特性と
「エコ de ヒート EX」の開発
安価な MMS 開発
土壌侵食の実態
技術開発ニュース 2024.03/No.168
2
�
- ▲TOP
- ページ: 4
-
CONTENTS
ドローンの自動再現飛行および障害物回避技術の開発・検証 ──────────────── 63・64
配電設備の3 次元データ取得のための安価な MMS 開発 ────────────────── 65・66
室内のにおいに対する人の嗅覚推定手法の検討 ────────────────────── 67・68
複数台普通充電器の最適充電制御のための要素技術開発
───────────────── 69・70
エネルギーマネジメントシステムを活用した学校空調の省エネ制御と快適性 ────────── 71・72
空調・照明・蓄電池を活用したデマンドレスポンスシステムの開発 ────────────── 73・74
暮らしにおける省エネや快適さの支援技術の定量評価 ─────────────────── 75・76
フィルタベント設備における混相流動に関する基礎研究
研究紹介
新型波力発電装置の実用化に向けた開発
────────────────── 77・78
──────────────────────── 79・80
未来の医療を目指した細胞凍結保存に関する共同研究 ───────────────────── 81
アンモニア混焼評価に関する取り組み ──────────────────────────── 82
リチウムの効率的な回収技術の確立を目指して ──────────────────────── 83
産業分野における水素専焼燃焼器の開発
────────────────────────── 84
長距離高速光無線ネットワークの実用化検討 ─────────────────────── 85・86
エッジコンピューティングを用いた画像 AIシステムの検証 ────────────────── 87・88
ダム揚圧力遠隔計測システムの開発 ─────────────────────────── 89・90
将来の電力設備工事に関わるBIM/CIM 導入に向けた課題 ───────────────── 91・92
空間共有型 3 次元遠隔コミュニケーションによる遠隔指導の実現
────────────── 93・94
生成系 AIを用いた議事録作成支援技術 ───────────────────────── 95・96
ドローン AI による鉄塔の 判定技術 ────────────────────────── 97・98
BEVを活用したエネルギーマネジメントシステムの試験導入 ─────────────────── 99
道の駅におけるPV・空調・蓄電池を用いた実証試験 ───────────────────── 100
変電所制御用蓄電池長寿命化に関する研究
内外ニュース
────────────────────── 101・102
2023 年度技術研究開発賞選考発表会および第 76 回中部電力技術研究発表会 開催 ────── 103
液式調湿空調機「モイストプロセッサー」が中部科学技術センター奨励賞を受賞 ───────── 107
CIGREシンポジウム投稿論文が Best of Papers に選定
────────────────── 107
「Smart City Park from AXIA EXPO」に出展 ────────────────────── 107
「テクノフェア2023」を開催 ─────────────────────────────── 108
アンケート
3
技術開発ニュース 読者アンケートご協力のお願い
技術開発ニュース 2024.03/No.168
───────────────────── 109
�
- ▲TOP
- ページ: 5
- 働く仲間の安全と健康を
守れる未来
古田 真二
Shinji Furuta
専務執行役員
秘書室 安全健康推進室統括
マネジメントサービス本部長
Senior Managing Executive Officer
General Manager of Secretarial Services Office,
Safety & Health Promotion Office and Business Service Division
「安全と健康」は、企業経営の最優先事項である。当社
が注目される以前から、過重労働の防止、全従業員へ
グループが地域や社会の持続的な発展に貢献し続けるた
の個別保健指導および特別休暇・傷病休職制度の充実な
めに、従業員の成長や活躍が重要であり、いきいきと働
どにより、従業員が心身の健康を維持できるよう努めて
ける環境整備が不可欠である。当社は 2019 年に「中部
きた。至近では、すべての働く仲間が「生涯にわたって
電力グループ安全健康基本方針」および「安全健康行動
健康であり続ける」という信念のもと、従業員のウェル
原則」を制定し、安全文化の醸成と健康経営の推進に取
ビーイングの実現、さらには企業価値の向上に繋げてい
り組んできた。この推進にあたっては、中部電力社長を
くことなどを目的に、健康経営の取り組みを一層加速さ
議長とする「安全健康推進会議」を年 4 回開催し、安全
せている。
と健康の推進に関する方針および施策の審議、進捗状況
2022 年には、自身の運動習慣や睡眠に関するデータ
のモニタリングを行っている。近年では、従業員の安全
を可視化することで、健康行動変容や運動習慣の定着を
と健康を推進するための投資に一層力を入れており、現
支援するため、従業員のうち希望者全員にウェアラブル
状の取組みと今後の展望について述べる。
端末を配付した。併せて、楽しく自身の健康と向き合う
ため、端末を活用し歩数・睡眠等の健康活動に応じてポ
まず、安全については、2019 年に実施した外部専門
イントを付与する「健康ポイントプログラム」を創設し
機関による安全診断を機に、
「すべてのケガは防ぐことが
た。社内部署対抗のバーチャルウォーキングイベントで
できる」との揺るがない信念のもと、安全文化の醸成に
は、ウェアラブル端末が共通のコミュニケーションツー
向けて、けん引役である経営幹部への安全健康研修をは
ルの役割を果たし、健康行動変容の促進のみならず、職
じめとする様々な取り組みを展開してきた。至近では、
場の一体感醸成にも寄与している。
労働災害件数は減少傾向にあるものの、決して起きては
また、運動・睡眠習慣の改善等好ましい行動変容が起
ならない死亡災害が 4 年連続で発生しており、強い危機
こっているだけでなく、端末活用率が高い群の BMI 数値
感を抱いている。当社従業員はもちろん、請負会社や協
が改善傾向であることもわかってきた。これらの取り組
力会社を含めて安全最優先の文化を醸成していくため、
みの結果、2024 年には 4 年連続 5 回目となる健康経営優
安全に関する行動を日々愚直に実践し続けることに加
良法人「ホワイト 500」に認定されている。
え、貴重な財産である仲間の成功や失敗から得た教訓を
今後の展望として、ウェアラブル端末から得られる
自らの行動に活かすこと(自分事)が大切である。
データを、AI なども活用しながら高度に分析、活用する
2022 年 に 運 用 開 始 し た「 安 全 活 動 支 援 シ ス テ ム
ことで、より効果的な施策につなげていく。また、健康
(AKSiS)」は、災害の未然防止と安全意識の向上を目指
保険組合とも連携しながら国が進めるデータヘルスとし
して開発し、安全情報の水平展開、災害データ蓄積(登
て展開することも念頭に置きつつ取り組みを深化させて
録、閲覧、周知など)システムとして当社グループ内で
いく。
活用されている。
PREFACE
巻頭言
今後は、「AI 技術による AKSiS データを用いた作業の
“働く仲間の安全と健康を守れる未来”は、当社グルー
危険予測」や「ウェアラブル端末との連携による作業者
プの事業を発展させていくうえで、必ず実現しなければ
のバイタル情報活用」等、より現場の安全活動に効果的
ならないものである。当社事業に携わる一人ひとりの命
なツールへのアップデートを検討しており、IoT や DX を
を大切にし、安全と健康を最優先に考えていくことを、
最大限活用し、共に働く仲間が安全にいきいきと働くこ
経営層が先頭に立って示し、安全文化の醸成および健康
とのできる環境の整備を続けていく。
経営の推進に引き続き取り組んでいく。
従業員の健康増進に向けては、当社は世間で健康経営
技術開発ニュース 2024.03/No.168
4
�
- ▲TOP
- ページ: 6
-
トピック ス
Topics
水素エネルギーキャリアとしてのアンモニアの可能性
Potential of ammonia as a hydrogen energy carrier
研究所発のアンモニア利用技術の開発に向けて
2050 年カーボンニュートラルの実現には、非電力分野における「熱需要」の CO2 排
出削減が重要である。特に産業部門においては、燃焼を伴う利用による熱需要も多く、電
化が出来ない熱需要に関しては、水素の利用が必要になると想定される。本稿では、水素
エネルギーキャリアであるアンモニアの可能性について説明する。
1
執筆者
先端技術応用研究所
先端技術ソリューショングループ
神田 茂樹
はじめに
2020 年10月、日本は 2050 年までに温室効果ガス排出
量を全体としてゼロにする、すなわち「カーボンニュートラ
ル(以下、CN)」を目指すことを宣⾔した。また、2021年 4
月には、2030 年度の新たな温室効果ガス削減目標として、
第 1 図 CN の目指す姿 1)
2013 年度から46%削減することを目指し、さらに、50%の
高みに向けて挑戦を続けるという新たな方針も示された。
2
CNを目指す
2050 年 CN の実現に向けては、温室効果ガス排出量の
9 割程度を占めるエネルギーを起源とする温室効果ガスの削
減が重要である。温室効果ガス排出量の大幅削減に取り組
第 2 図 CO2 排出削減のイメージ 2)
3
産業部門のエネルギー消費量の見通し
み、それでも排出せざるを得なかった量を、最終的に「植林
国立環境研究所の分析 3) によると、産業部門における
や森林管理などによる吸収」や「CO2 を回収して貯留・利用
2050 年のエネルギー消費量の見通しとして、一部で化石
するCCUS」により差し引きゼロ、全体としてゼロを目指す
エネルギーの利用が残るものの、新しく水素や合成燃料の
ことが、
CNの「ニュートラル(中立)
」の意味するところである。
利用が見込まれている。産業部門における熱需要は、燃焼
エネルギーを使うユーザー側が CN を実現するために
を伴う利用も多く、利用用途やその特性をもとに「省エ
は、次のような段取りで取り組むことが大切である。
ネ」や「熱需要の電化」を進め、電化が出来ない熱需要に
①
今まで以上の徹底した省エネに取り組むこと
関しては、水素の利用が必要になると想定される。
②
廃熱の回収やヒートポンプなどのエネルギー効率の高
い製品を使用することで、エネルギーの利用効率を高
めること
③
再生可能エネルギーなどのカーボンフリー電気の利用
を前提として、電化を進めること
④
電化が困難な熱需要に対しては、水素やアンモニアの
利用などのエネルギーの転換を進めること
ここで「非電力」分野における「熱需要」の CO2 排出
第 3 図 産業部門のエネルギー消費量の推移見通し 3)
削減に着目する。「運輸」における取り組みについてはこ
こでは割愛するが、「民生」のうち、家庭や業務部門での
熱需要は、主に空調や厨房、給湯での利用である。この空
調や厨房、給湯においてはヒートポンプを始めとした電化
技術の開発が進んでおり、カーボンフリー電気を利用した
5
4
水素の特徴
水素は、利用段階では CO2 を排出しないエネルギーであ
電化への転換が、CO2 排出削減の有力な手段となる。一方
り、CN の実現に貢 献するエネルギーとして期待されてい
で、電化の課題としては、機器設置スペースが増えること
る。日本には再生可能エネルギーの適地が少なく、水素を
や、電気容量が増えることなど、設備の導入の際にはコス
製造するための電力を全て国内で賄おうとするのは困難であ
トと合わせてそれらの制約をクリアする必要がある。
り、そのため海外から調達する仕組みを整えることが必要
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 7
-
ト ピ ッ ク ス
不可欠である。また、水素は体積当たりのエネルギー密度
が低いため、気体のままでは輸送や貯蔵の効率が悪く、水
素エネルギーキャリアとして液化水素、有機ハイドライド、
アンモニアによる輸送や貯蔵の技術開発が進められている。
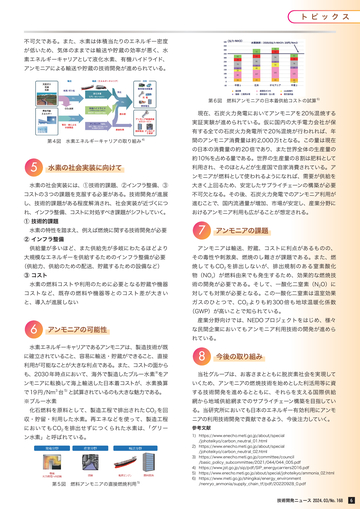
第 6 図 燃料アンモニアの日本着供給コストの試算 6)
現在、石炭火力発電においてアンモニアを20%混焼する
実証実験が進められている。仮に国内の大手電力会社が保
有する全ての石炭火力発電所で20%混焼が行われれば、年
第 4 図 水素エネルギーキャリアの取り組み
5
4)
水素の社会実装に向けて
間のアンモニア消費量は約 2,000 万 tとなる。この量は現在
の日本の消費量の約 20 倍であり、また世界全体の生産量の
約10%を占める量である。世界の生産量の 8 割は肥料として
利用され、そのほとんどが生産国で自家消費されている。ア
ンモニアが燃料として使われるようになれば、需要が供給を
水素の社会実装には、①技術的課題、②インフラ整備、③
大きく上回るため、安定したサプライチェーンの構築が必要
コストの3つの課題を克服する必要がある。技術開発が進展
不可欠となる。その後、石炭火力発電でのアンモニア利用が
し、技術的課題がある程度解消され、社会実装が近づくにつ
進むことで、国内流通量が増加、市場が安定し、産業分野に
れ、インフラ整備、コストに対処すべき課題がシフトしていく。
おけるアンモニア利用も広がることが想定される。
① 技術的課題
水素の特性を踏まえ、例えば燃焼に関する技術開発が必要
② インフラ整備
7
アンモニアの課題
供給量が多いほど、また供給先が多岐にわたるほどより
アンモニアは輸送、貯蔵、コストに利点があるものの、
大規模なエネルギーを供給するためのインフラ整備が必要
その毒性や刺激臭、燃焼のし難さが課題である。また、燃
(供給力、供給のための配送、貯蔵するための設備など)
焼しても CO2 を排出しないが、排出規制のある窒素酸化
③ コスト
物(NOx)が燃料由来でも発生するため、効果的な燃焼技
コストなど、既存の燃料や機器等とのコスト差が大きい
対しても対策が必要となる。この一酸化二窒素は温室効果
と、導入が進展しない
ガスのひとつで、CO2 よりも約 300 倍も地球温暖化係数
水素の燃料コストや利用のために必要となる貯蔵や機器
術の開発が必要である。そして、一酸化二窒素(N2O)に
(GWP)が高いことで知られている。
6
アンモニアの可能性
水素エネルギーキャリアであるアンモニアは、製造技術が既
に確立されていること、容易に輸送・貯蔵ができること、直接
利用が可能なことが大きな利点である。また、コストの面から
産業分野向けでは、NEDO プロジェクトをはじめ、様々
な民間企業においてもアンモニア利用技術の開発が進めら
れている。
8
今後の取り組み
も、2030 年時点において、海外で製造したブルー水素※をア
当社グループは、お客さまとともに脱炭素社会を実現して
ンモニアに転換して海上輸送した日本着コストが、水素換算
いくため、アンモニアの燃焼技術を始めとした利活用等に資
で19 円 /Nm 台 と試算されているのも大きな魅力である。
する技術開発を進めるとともに、それらを支える国際 供給
※ブルー水素
網から地域供給網までのサプライチェーン構築を目指してい
化石燃料を原料として、製造工程で排出された CO2 を回
る。当研究所においても日本のエネルギー有効利用にアンモ
収・貯留・利用した水素。再エネなどを使って、製造工程
ニアの利用技術開発で貢献できるよう、今後注力していく。
においても CO2 を排出せずにつくられた水素は、「グリー
参考文献
3
5)
ン水素」と呼ばれている。
第 5 図 燃料アンモニアの直接燃焼利用 5)
1) https://www.enecho.meti.go.jp/about/special
/johoteikyo/carbon_neutral_01.html
2) https://www.enecho.meti.go.jp/about/special
/johoteikyo/carbon_neutral_02.html
3) https://www.enecho.meti.go.jp/committee/council
/basic_policy_subcommittee/2021/044/044_005.pdf
4) https://www.jst.go.jp/sip/pdf/SIP_energycarriers2016.pdf
5) https://www.enecho.meti.go.jp/about/special/johoteikyo/ammonia_02.html
6) https://www.meti.go.jp/shingikai/energy_environment
/nenryo_anmonia/supply_chain_tf/pdf/20220928_0.pdf
技術開発ニュース 2024.03/No.168
6
�
- ▲TOP
- ページ: 8
-
特 集
Special Edition
デジタルによるものづくり
共創プラットフォームの構築と活用
アナログ手法とデジタル技術を組み合わせた工程改善検討の取り組み
1
執筆者
先端技術応用研究所
プロジェクト推進 G
開始し(第 1 図)、2025 年度からのサービス化を目指して
はじめに
いる。
本プラットフォームでは、日本の製造業全体の底上げを
欧 州 を は じ め と す る 製 造 主 要 先 進 国 に お い て は、
目指し、フロントローディングに資する個社最適化と全体
「Industry 4.0」に代表されるデジタル技術を活用した自
最適化のソリューションサービスを中核として取り組みを
動化・効率化の動きが活発になっている。その目的は、
進めている。
人間の想像力や感性を最大限に生かした価値創造を追求
ものづくり白書や政策投資銀行の調査によると、IT 投
し、効率化により価値の高い時間(欧州では特に家族や趣
資総額自体は、堅調に増加している一方で、特に中小企業
味の時間)を創出することであり、CPS(cyber physical
においては、電子化やシステム化という手段が目的化し、
system)や IoT、クラウドコンピューティングという先端
本質的な業務の変革や効率化に至っていないことが指摘さ
技術を活用した産業改革に乗り出している。また、自動車
れている。そのことから、的を射た改善を進めることがで
産業界を中心とした Catena-X などのデータ連携を目指し
きれば、改善によって創出された人やお金を、次の改善に
たデータ標準化・共有化の波も押し寄せている。
投資することができ、このサイクルを回すことがデジタル
日本においても、「Smart Factory」の実現に向けた構
化・効率化への唯一の近道であると考える。
想策定やデータの取得・共有化の取り組みが大手企業を中
そこで当社では、デジタル技術を用いたフロントロー
心として急速に普及してきている。しかし、製造プロセス
ディングにより生産工程改善を図るにあたり、的を射た改
全体の最適化には至っておらず、日本全体を見てもデジタ
善点を導出するためには、第三者目線による全業務の洗い
ル技術を活用するための費用やデジタル人材の不足という
出し・整理・分析(以下、業務分析)が重要であると捉
足元の問題と、そもそも進め方に関するノウハウの不足と
え、業務分析の検証から開始した。
いう根本的な問題の両面から解決する必要がある。
2
プラットフォーム構想と改善のサイクル
研究内容
本研究では、業務分析の準備としての①現場調査、その
上記の課題に対して、効率的なものづくりを実現する
情報を活用した②業務分析といったアナログ手法を経て、
キーワードはフロントローディングであると考える。つま
③シミュレーションによる実装に向けた事前検証、および
り、事前検討に重点を置き、先端技術やデータを活用して
これら一連の業務について④自動化・高機能化技術の検討
その検討精度を高めることにより、手戻りを抑制し、人も
を行った。
お金も投資余力を創出するのである。
そこで、製造業の集積地である中部地域の電力基盤を担
う当社は、製造業に支えられている側面があることから、
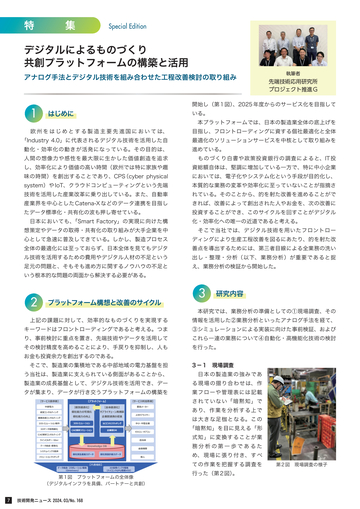
3 - 1 現場調査
日本の製造業の強みであ
製造業の成長基盤として、デジタル技術を活用でき、デー
る現場の摺り合わせは、作
タが集まり、データが行き交うプラットフォームの構築を
業フローや管理表には記載
【プラットフォーム】
【サービス提供者】
【サービス利活用者】
中部電力
【個別最適化】
【全体最適化】
経営コンサルティング
個社能力の可視化
サプライチェーン再構築
個社能力の向上
企業間連携の促進
メガサプライヤー
3Dシミュレーション
SCビジネスマッチング
中小・中堅企業
CAE解析ソリューション
企業間DR
業務改善コンサルティング
3Dシミュレーション制作
3Dデータ高精細化
CAE解析コンサルティング
ラインビルダー・SIer
システムインフラ提供
ソリューションマッチング
製造メーカー
ゼネコン・サブコン
自治体
データ統合・標準化
Knowledge DB
個社別生産能力データ
データ統合・コラボレーション環境
(Omnivers)
個社別設計能力データ
【共通機能】
技術開発ニュース 2024.03/No.168
されていない「暗黙知」で
あり、作業を分析する上で
は大きな足枷となる。この
「暗黙知」を目に見える「形
式知」に変換することが業
金融機関
務分析の第一歩であるた
個人
め、 現 場 に 張 り 付 き、 す べ
3D活用インフラ環境
(ハイエンドGPU搭載VDI)
第 1 図 プラットフォームの全体像
(デジタルインフラを具備、パートナーと共創)
7
3
ての作業を把握する調査を
行った(第 2 図)。
第 2 図 現場調査の様子
�
- ▲TOP

- ページ: 9
-
特
集
+ 第 3 図に示すのは、管理表の情報と実際の作業の比較
である。現場の管理表では部品の受入れという単一作業に
まとめられていた。これに対して実際の現場では、荷下ろ
しやピッキングに伴う準備・後段取りなど複数の作業が存
在する。これらは付随作業として捉えられていたため、管
理表からは抜け落ちており、第三者による客観的な視点で
の現場調査の必要性が明確になった。本研究ではさらに、
調査で得た情報を基に、次項の業務分析を行った。
3 - 2 業務分析
業務分析では、業務のムリ・ムダやボトルネックを抽出
する視点が必要であるため、現場調査で得られた「暗黙
知」も含めた情報を基に工程を細分化し、実態を正確に表
第 5 図 検証で作成した 3 次元シミュレーション
3 - 3 シミュレーションによる実装に向けた事前検証
明確になった課題点に対する改善効果の事前検証には 3
現した作業フロー図を書き起こす。本研究では、プロセス
次元シミュレーションが有効である。設備や人、生産ライ
分析手法として PReP モデル法(Products Relationship
ン間の相互作用を再現でき、さらには視覚的に確認できる
Process)を用いて、この作業フロー図を分析した。
ことで、改善可否の判断がしやすくなる。
PReP 法とは、作業の最終目的を明確にし、その目的に
第 5 図に示すのは、現在検証中の企業の既存工場の一部
対する成果物(製品や部品など)を特定することで、その
を 3 次元モデル化した様子である。業務分析の結果を反映
成果物から遡って、適切な工程の流れになっているかを分
することで、実在する現在の工場の稼働状態の再現が可能
析する手法である。今回具体的には、
「業務構造分析」と
となった。また、抽出した改善点を反映したシミュレー
して各成果物ごとに作業フローを分解するとともに、「作
ションにより、改善前後の結果を比較してその効果を評価
業工数分析」として、実際の作業を細分化して工数を定量
できるため、生産性向上等の検討に役立てることができる
化した。その後に第 4 図に示すリスクパターンの例などと
ようになった。
照らし合わせることで、ボトルネックとなる改善重点工程
の見える化が可能となった。
3 - 4 自動化・高機能化技術の検討・開発
業務分析やシミュレーションは作業量が多く、また管理
一般的な行程フローのスケール
一般的な行程フロ
表や作業フローが不十分なケースもあるため、将来的に
(例)部品受入れ
は、業務分析手法や業務パターンを標準化手法として整理
部品受入れ
1.外観
2.部番/品名/数量
(例)部品受入れ
ローのスケール
業務分析を目的とした工程フローのスケール
カギの保管場所が
現場から遠い
フォークリフトのカギを取りに行く
フォークリフト駐車場に向かう
入荷バースに向かう
運転前点検を行う
フォークリフトのカギを返却しに行く
確認しやすい
部品の積み方の検討
バーコード管理
部番/品名の確認
確認ポイントの
標準化
外観の確認
数量の確認
置き場レイアウトの
見直し
フォークリフト駐車場に向かう
記録
また生産設備の 3 次元図面の不足があるため、3D シミュ
NaRF 技術や LiDAR 測定により取得した点群データの利用
など 3 次元化技術の活用も行っていく。
部品置き場へ搬送
タブレットと在庫管理
システムとを連携
し、AI 等を活用して自動化・省力化する技術の開発を行う。
レーションに必要なパーツを複数の写真から自動作成する
積み下ろし
場内ルートの
検証
カギの保管場所が
現場から遠い
再び部品置き場に向かう
トラック入出荷の
タイムチャート見直し、
効率化
場内ルートの
検証
別スタッフが
代行
現場から遠い
パソコンのある場所に向かう
在庫管理システムに入力
第 3 図 管理表の情報粒度と暗黙知の実態の例
4
今後の展望
現場調査や業務分析といったアナログ手法と 3 次元デー
#
1
リスクポイント
同期関係
2
ステークホルダ間で
成果物授受
3
作業から多くの
成果物を生成
4
作業に多くの
成果物を要する
5
成果物が多くの
作業のインプット
となる
表示例
成果物
問題点の抽出観点
成果物
成果物
ステークホルダ間でやり取りをするため
不確実な伝達やセキュリティリスクが発生しやすい
作業
成果物
作業
擦り合わせながら成果物を作成するため、
情報ロスや手違いが発生しやすい
成果物
成果物
作業の負荷が高くなるため、
業務上のボトルネックにになる可能性が高い
成果物
成果物
作業
成果物
作業
成果物
作業
作業
業務上のボトルネックになる可能性が高い
多くの作業で活用されるため
情報の正確性や高いセキュリティ性が求められる
第 4 図 業務分析における特徴的な業務パターンの例
タを活用したデジタル技術を組み合わせて事前検証をする
プロセスの開発に取り組み、効果検証を実施中である。今
後はデータが集まる仕組みとしてデータ標準化を行うこと
が必要であり、集約・整理・検索・解析・共有機能の開発
も行う。
またこのプロセスは製造業以外にも適用可能であるた
め、電気事業における業務の効率化や 3 次元データで先行
する建設業などの他ドメインにも展開していきたい。
技術開発ニュース 2024.03/No.168
8
�
- ▲TOP

- ページ: 10
-
特 許 紹 介
Introduction Patents
特許紹介
中部電力 3 社が新たに取得した特許権(期間:2022 年 12 月~ 2023 年 12 月)
登録日
7186961
2022/12/2
吸湿材
中山 浩
国立大学法人鳥取大学
7190691
2022/12/8
ボンベ運搬アシスト器具
杉本 敏文
7190846
2022/12/8
消費電力量用途分解システム及
びプログラム
志村 欣一
山岸 明日香
柳平 斐子
国立大学法人三重大学
株式会社 SANKEI
7216046
7222650
2023/2/7
巡視点検システム
空調機器の電力量予測システム
及び空調機器の操作システム
追良瀬 利也
難波 隆博
坂東 広嗣
林 大介
宮部
間瀬
山岸
高村
南原
志村
7235237
2023/2/28
金型加熱装置
永松
河村
竹内
杉山
7248232
2023/3/20
飲料製造装置及び飲料製造方法
7253737
2023/3/30
電力量計用バイパス工具
7265923
2023/4/19
加熱装置及び加熱方法
7265915
2023/4/19
津波高及び津波到達時間予測シ
ステム
7277240
7291613
9
2023/1/23
発明の名称
当社 G
発明者
登録番号
2023/5/10
2023/6/7
電気料金管理システム及び電気
料金管理方法
孝典
敦史
明日香
幸宏
健一
欣一
克明
和彦
章浩
公英
共有権利者
主管部署
先端技術応用研究所
先端技術ソリューショングループ
電力技術研究所 電力設備グループ
-
先端技術応用研究所
情報技術グループ
-
先端技術応用研究所
情報技術グループ
-
先端技術応用研究所
情報技術グループ
メトロ電気工業株式会社
先端技術応用研究所
先端技術ソリューショングループ
河村 和彦
国立大学法人静岡大学
小笠原 強
霜垣 昌宏
中部精機株式会社
東邦電気株式会社
先端技術応用研究所
先端技術ソリューショングループ
森 秀樹
長 伸朗
直本工業株式会社
中部電力パワーグリッド株式会社
配電部 配電系統高度化グループ
先端技術応用研究所
先端技術ソリューショングループ
田中 良仁
-
高橋 亮
川畑 宏幸
伊藤 健太
向原 夕美子
日比野 泰隆
原子力安全技術研究所
地震・津波・防災グループ
-
中部電力ミライズ株式会社
事業戦略本部 サービス・プラット
フォーム開発部
変電所用屋外鉄構の基礎構造
服田 雅雄
CO2 フリー価値付電力買取仲介
システム及び CO2 フリー価値付
電力買取仲介方法
高橋 亮
川畑 宏幸
伊藤 健太
向原 夕美子
日比野 泰隆
久保田 雅之
愛知金属工業株式会社
瀧上工業株式会社
中部電力パワーグリッド株式会社
エンジニアリングセンター
技術開発グループ、設備技術グルー
プ、送変電部
中部電力ミライズ株式会社
事業戦略本部
サービス・プラットフォーム開発部
7292926
2023/6/9
7311386
2023/7/10
倒木対策用ケーブル吊架装置
洞 大貴
岡田 剛
那須電機鉄工株式会社
7313007
2023/7/13
低圧鋳造装置及び低圧鋳造装置
用ヒータユニット
メトロ電気工業株式会社
スズキ株式会社
先端技術応用研究所
先端技術ソリューショングループ
7319631
2023/7/25
水酸化リチウムの製造方法、及
び水酸化リチウムの製造装置
杉山 公英
竹内 章浩
永松 克明
中部電力パワーグリッド株式会社
エンジニアリングセンター
用品グループ、配電部
長 伸朗
永松 克明
株式会社タナベ
先端技術応用研究所
先端技術ソリューショングループ
7333515
2023/8/17
微細気泡式浮上分離装置
赤坂 千春
関西オートメ機器株式会社
7336093
2023/8/23
微少粉塵・ヒューム捕集装置お
よび汚染空気回収機構
稲垣 博光
株式会社日本環境調査
研究所
技術開発ニュース 2024.03/No.168
-
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
原子力安全技術研究所
プラントグループ
�
- ▲TOP

- ページ: 11
-
特 許 紹 介
登録番号
登録日
7345355
2023/9/7
7349678
2023/9/14
当社 G
発明者
共有権利者
物体識別装置
瀬川 修
-
巻線支持具、線材回収装置、お
よび、線材回収方法
堀畑 隆一
田原 義朗
株式会社永木精機
三和テッキ株式会社
日本原子力発電株式会社
株式会社大林組
原子力本部 原子力土建部
設計管理グループ
株式会社サンキョウ
中部電力パワーグリッド株式会社
電子通信部 設備運用グループ
株式会社日本環境調査
研究所
三立機械工業株式会社
原子力安全技術研究所
プラントグループ
発明の名称
主管部署
先端技術応用研究所
情報技術グループ
中部電力パワーグリッド株式会社
電子通信部 設備運用グループ
中部電力パワーグリッド株式会社
エンジニアリングセンター
技術開発グループ、設備技術グルー
プ、送変電部
7356894
2023/9/27
鉄塔の改造工事用台棒装置
高橋 凌太
近藤 史彦
7362325
2023/10/6
防潮堤
熊崎 幾太郎
7362070
2023/10/6
保護カバー及び架空線の交差箇
所における上側の架空線の撤去
方法
大塚 賢
湊 幹夫
山下 隆幸
7365011
2023/10/11
ケーブル分解装置、ケーブルの
分解方法
池堂 和仁
7367921
2023/10/16
農作物の残留農薬分解装置及び
方法
河村 和彦
森 秀樹
7371861
2023/10/23
吸湿材
中山 浩
国立大学法人鳥取大学
7371864
2023/10/23
ブリスター試験機及びブリス
ター試験方法
橋本 英明
竹内 章浩
日本坩堝株式会社
7381002
2023/11/7
熱処理システム
棚橋 尚貴
株式会社エコム
7394617
2023/11/30
空気比推定システム、空気比制
御システム、並びに未燃検知シ
ステム又は失火検知システム
赤坂 千春
-
7401068
2023/12/11
情報処理システム、情報処理方
法及びプログラム
丸目 裕樹
山田 竜司
中部電力パワーグリッド株式会社
エンジニアリングセンター
技術開発グループ、送変電部
7403329
2023/12/14
変圧器過負荷保護装置及び方法
安部 晃平
堀 和彦
今井 重典
中部電力パワーグリッド
株式会社
株式会社センシンロボ
ティクス
-
中部電力パワーグリッド株式会社
系統運用部 系統技術グループ
カワサキ機工株式会社
原子力本部 原子力部
総括・品質保証グループ
先端技術応用研究所
先端技術ソリューショングループ
先端技術応用研究所
先端技術ソリューショングループ
先端技術応用研究所
先端技術ソリューショングループ
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
取得特許のご紹介(一部)
特許の登録番号・名称
特許第 7345355 号・物体識別装置
特許の概要
画像に含まれる同じ形状の複数の物体を個別に識別する技術であり、
撮影画像から物体が配置されているパネルなどの領域を判別し、
その領域内の物体の種別と位置を検出し、物体配置情報として
記憶することで、物体を個別に識別する装置。
同一形状の物体を個別に識別した例
( ダイアルやスイッチ等、同じ形状の物体を識別 )
特許の登録番号・名称
特許第 7190691 号・ボンベ運搬アシスト器具
特許の概要
台車を使用せずに、複数人で持ち上げてボンベを運ぶときに保持しやすく、
起立状態で回転しながらボンベを移動するときでも邪魔にならず、
砂利や砕石敷の地面でも安定して運搬できるようにした
ボンベ運搬アシスト器具。
ボンベにアシスト器具を装着した状態
技術開発ニュース 2024.03/No.168
10
�
- ▲TOP
- ページ: 12
-
研 究 成 果
Results of Research Activities
真空バルブ式 SVR の劣化調査
Investigation into the Degradation of「Vacuum valve type SVR」
加速劣化試験による耐久性能の評価
2007 年から採用された真空バルブ式自動電圧調整器(以下、真空バルブ式 SVR とい
う)は、密閉されたバルブの中に電気接点があり、絶縁油が接点アークの影響を受けず劣
化し難いため、長寿命化が期待されていた。今回、撤去品ならびに加速劣化品を調査した
結果、現行のメンテナンス周期(20 万回動作毎)を更に延伸化できることがわかった。
執筆者
電力技術研究所
電力設備グループ
伏屋 貴文
1
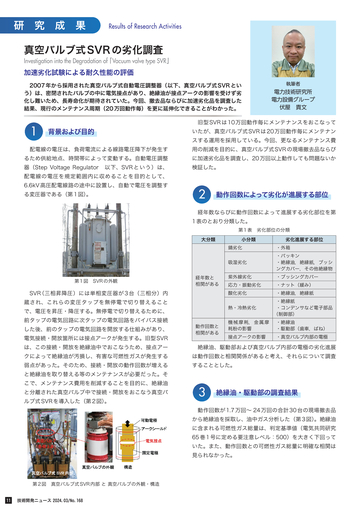
背景および目的
旧型 SVR は 10 万回動作毎にメンテナンスをおこなって
いたが、真空バルブ式 SVR は 20 万回動作毎にメンテナン
スする運用を採用している。今回、更なるメンテナンス費
配電線の電圧は、負荷電流による線路電圧降下が発生す
用の削減を目的に、真空バルブ式 SVR の現場撤去品ならび
るため供給地点、時間帯によって変動する。自動電圧調整
に加速劣化品を調査し、20 万回以上動作しても問題ないか
器(Step Voltage Regulator 以下、SVR という)は、
検証した。
配電線の電圧を規定範囲内に収めることを目的として、
6.6kV 高圧配電線路の途中に設置し、自動で電圧を調整す
る変圧器である(第 1 図)。
2
動作回数によって劣化が進展する部位
経年数ならびに動作回数によって進展する劣化部位を第
1 表のとおり分類した。
第 1 表 劣化部位の分類
大分類
第 1 図 SVR の外観
小分類
経年数と
相関がある
SVR(三相昇降圧)には単相変圧器が 3 台(三相分)内
蔵され、これらの変圧タップを無停電で切り替えること
前タップの電気回路に次タップの電気回路をバイパス接続
した後、前のタップの電気回路を開放する仕組みがあり、
電気接続・開放箇所には接点アークが発生する。旧型 SVR
錆劣化
・外箱
吸湿劣化
・パッキン
・絶縁油,絶縁紙,ブッシ
ングカバー,その他絶縁物
紫外線劣化
・ブッシングカバー
応力・振動劣化
・ナット(緩み)
酸化劣化
・絶縁油,絶縁紙
熱・冷熱劣化
で、電圧を昇圧・降圧する。無停電で切り替えるために、
動作回数と
相関がある
劣化進展する部位
・絶縁紙
・コンデンサなど電子部品
(制御部)
機 械 摩 耗, 金 属 摩
耗粉の影響
・絶縁油
・駆動部(歯車,ばね)
接点アークの影響
・真空バルブ内部の電極
は、この接続・開放を絶縁油中でおこなうため、接点アー
絶縁油、駆動部および真空バルブ内部の電極の劣化進展
クによって絶縁油が汚損し、有害な可燃性ガスが発生する
は動作回数と相関関係があると考え、それらについて調査
弱点があった。そのため、接続・開放の動作回数が増える
することとした。
と絶縁油を取り替える等のメンテナンスが必要だった。そ
こで、メンテナンス費用を削減することを目的に、絶縁油
と分離された真空バルブ中で接続・開放をおこなう真空バ
ルブ式 SVR を導入した(第 2 図)。
3
絶縁油・駆動部の調査結果
動作回数が 1.7 万回~ 24 万回の合計 30 台の現場撤去品
から絶縁油を採取し、油中ガス分析した(第 3 図)。絶縁油
に含まれる可燃性ガス総量は、判定基準値(電気共同研究
65 巻 1 号に定める要注意レベル:500)を大きく下回って
いた。また、動作回数との可燃性ガス総量に明確な相関は
見られなかった。
第 2 図 真空バルブ式 SVR 内部 と 真空バルブの外観・構造
11
技術開発ニュース 2024.03/No.168
�
- ▲TOP

- ページ: 13
-
研 究 成 果
第 3 図 油中ガス分析の結果
駆動部が動作する際の金属摩耗粉によってスラッジが発
第 5 図 接点アークの痕跡
生し、これが絶縁油に混合されると耐電圧性能が低下する
次に、別の現場撤去品(動作回数が 9.3 万回~ 17 万回の
可能性がある。そこで、採取した絶縁油の絶縁破壊電圧を
合計 3 台)に SVR 定格電流を通電させ、接点アークが最大
測定した(第 4 図)。全て判定基準値(30kV/2.5mm)を
となる条件おいて動作回数が累計 40 万回になるまで加速
上回っていた。また、動作回数との絶縁破壊電圧にも明確
劣化試験をおこなった。これらの現場撤去品の真空バルブ
な相関は見られなかった。
(合計 9 本)の消耗量を測定し、動作回数との相関関係を検
証した。動作回数 40 万回時の消耗量が最大になった現場
撤去品(動作回数 9.3 万回 5,000kVA)の試験結果を第
6 図に示す。
第 4 図 絶縁破壊電圧の測定結果
また、現場撤去品の駆動部の動作状態についても調査し
た結果、動作性能に異常はなかった。
第 6 図 加速劣化試験の結果
4
真空バルブの調査結果
40 万 回 ま で 動 作 さ せ て も 消 耗 量 が 判 定 基 準 値(2.0
㎜)を上回ることはなかった。動作回数と消耗量は比例
真空バルブ内部の電極接点が接点アークによって影響を
関係にあると仮定した場合、今回の試験条件において進
受けると、接点部分が消耗する。これが進展すると、可動
展速度の最大は 22.3 μ m/ 万回(真空バルブ A)であっ
電極を投入しても接続状態にならない不具合状態となる。
た。この速度で新品から 40 万回動作させた場合の消耗量
そこで、動作回数が 16.4 万回~ 17.5 万回の合計 3 台の現
は 0.892mm と算出でき、これは判定基準値以下である。
場撤去品から 25 本の真空バルブを取り出し、それぞれの
また、加速劣化試験後、真空バルブは全て、中部電力パ
消耗量を測定した結果、接点箇所に接点アークの痕跡が見
ワーグリッドの規格で定める絶縁性能(開放状態で電極間
られた(第 5 図)。しかし、消耗量は極めて微量であり、製
AC3kV/1 分、±IMP10kV)を満足しており、駆動部の動
造上の公差範囲内を上回るものはなかった。接点アークは
作状態にも異常はなかった。
電極間を流れた通電電流の大きさと正の相関があるため、
現場撤去品が設置された箇所には、大きな負荷電流が流れ
ていなかったと考えられる。
5
今後の展開
今回の調査によって、現行のメンテナンス周期(動作回
数 20 万回毎)を延伸化しても問題ないことが示された。
この結果を、新たなメンテナンス基準に反映する。
技術開発ニュース 2024.03/No.168
12
�
- ▲TOP

- ページ: 14
-
研 究 成 果
Results of Research Activities
VR 技術を活用した安全教育支援アプリケーションの開発
Development of support application for safety education using Virtual Reality technology
監督者安全教育への VR 技術適用の実現
配電設備の工事において、現場監督業務は作業の安全、災害の未然防止に不可欠な役割
である。定期的に監督者に対し机上と実地訓練の 2 方面から安全教育を行っているが、実
地訓練は準備に手間と時間がかかるため何度も再現することができず、効率的な監督者育
成に支障をきたしていた。この課題を解決するため、VR 技術を活用し、監督者が災害発
生状況をリアルに体験できる安全教育支援アプリケーションを開発した。
執筆者
電力技術研究所
電力品質グループ
武藤 貴昭
1
背景および目的
受講者は配電設備工事の監督者となり、2 人の作業員を
指導する。VR 教育を開始すると、作業者が不安全行動を
行い、過去に発生した災害状況を再現する。体験者は、作
配電設備の工事では、監督者が地上から作業を監視・監
業者の不安全行動を発見し、コントローラの操作で指摘す
督し作業者の危険のポイントを指摘することで、感電・墜
ることで災害の発生を防止する。受講者が見ている映像例
落・挟まれ等の災害(以降災害と呼ぶ)の未然防止に大き
を第 2 図に示す。
な役割を果たしている。
従来、監督者を育成する安全教育では、研修所にて集合
研修を行い、机上教育や実地訓練を行ってきた。実地訓
練は、机上教育に比べ研修受講者の記憶に残り、教育効果
が高い。一方で、工事現場の状況を作る準備に時間と手間
がかかるため多く経験することができない。また、災害状
況の再現には危険が伴うため、実地訓練ではそこまで再現
できないことも課題である。そこで、これらの課題を解消
し、監督者の安全意識の醸成を行うために、VR(Virtual
Reality)技術を活用した監督者の安全教育支援アプリケー
ションを開発した。
開発にあたり、VR の再現性が低い場合、そちらに気を
第 2 図 安全教育支援シミュレータ映像例
(1)動作再現
本シミュレータでは、作業者の挙動をモーションキャプ
取られ教育内容に集中できない懸念があったため、受講者
チャにより再現した。モーションキャプチャとは、人物や
となる監督者の目から見ても違和感のないよう、作業者の
物体の動きを 3 次元データ化する技術である。今回は慣性
動作や状況のリアリティを細部まで追求した安全教育支援
センサ式(センサを体に装着することで、動作情報を取得
シミュレータと監督者安全教育の指導員向けのリプレイソ
する方法)を採用した。実際に、熟練作業者の体にセンサ
フトの開発を行った。
を取り付け、工事作業の動作データを計測したところ、計
測データのみから作成したモデルでは、センサ未取り付け
2
安全教育支援シミュレータの概要
箇所の動作が再現されなかった。このため、作業者の作業
動作に違和感があり、監督者が不安全行動かどうかを判断
しづらいことがわかった。その対策として、例えば第 3 図
安全教育支援シミュレータは、作業者の災害状況を模
に示すように撮影から得られた作業動作データ(指の動
擬した様々なシチュエーションを疑似体験する VR アプ
き)の違和感をなくすよう、細部までモデルを見直し、忠
リケーションである。受講者は、コントローラと HMD
実に再現することで、予想しづらい動作を極力なくした。
(Head Mounted Display)を使用し、VR 空間内を自由に
移動することができる。受講時の VR 機器使用状況を第 1
図に示す。
HMD
コントローラ
第 1 図 VR 機器使用状況
13
技術開発ニュース 2024.03/No.168
第 3 図 動作撮影と再現データモデル例(指の動きの修正)
�
- ▲TOP

- ページ: 15
-
研 究 成 果
(2) 3D モデリング
本シミュレータでは、作業員、電柱、高所作業車等の
(1)VR 体験者の行動再現
リプレイソフトでは、第 6 図に示す簡易なアバターモデ
モデルについても、写真や仕様書から 3D モデルを作成し
ルが、安全教育支援シミュレータ内の受講者の行動を再現
た。再現性の低さによる必要な設備・道具類の不足によ
している。アバターモデルは、リプレイソフト上で受講者
り、受講者に安全上の不備と捉えられないよう、設備・道
の位置および頭の向きの時間変化を再現し、任意時間にお
具類の細部までこだわり、実態と違和感がないようにモデ
ける受講者の行動を振り返ることが可能となる。
ルの修正を行った。3D モデリング例を第 4 図に示す。
第 4 図 3D モデリング例
第 6 図 受講者のアバターデザイン
3
リプレイソフトの概要
(2)行動軌跡の再現
リプレイソフトには、受講者がいつ、どの位置で監督し
リプレイソフトは、監督者安全教育の指導員向けのソフ
ていたのか、どこを見ていたのかを CSV 形式のログで保存
トであり、安全教育支援シミュレータ内の受講者の行動を
する機能を付けた。これにより、受講者毎の行動軌跡など
パソコン上で振り返り可能な Windows アプリケーション
をデータ化し、分析する事を可能とした。受講者の行動軌
である。シークバーを操作することで、作業の任意時間に
跡例を第 7 図に示す。
受講者がどこに居たかの確認を可能とする。また、マウス
操作によりマルチアングルで VR 空間内の事象を確認する
新任監督者
ベテラン監督者
ことができるため、受講者が何に注目して監督していたか
の確認も可能である。リプレイソフトの画面例を第 5 図に
示す。
第 7 図 受講者の行動軌跡例
受講者
4
研究成果と今後の展開
本 VR 技術を活用した安全教育支援アプリケーションを
シークバー
経験豊富な監督者 9 名に体験してもらい、評価と課題の抽
再生・停止ボタン
出を行った。同アプリケーションは、作業員の挙動や設
備・道具類のリアリティを追求したことで、安全意識の醸
成や教育に効果的であると評価された。一部の体験者に
VR 酔いが見られたが、移動先に視点を固定する等、視点
の位置に気を付けることにより軽減された。
今回開発したアプリケーションは、2023 年度から中部
電力パワーグリッド(株)配電研修所の監督者安全教育に
導入済みである。本アプリケーションの導入により、災害
状況の体験が可能となっただけでなく、実地訓練では再現
困難な複数の災害状況シナリオを用意しており、実地訓練
第 5 図 リプレイソフト画面例
に比べて、より効率的な教育が可能となっている。今後は
得られた知見を活用し、他部門や関連会社への展開を考え
ている。
技術開発ニュース 2024.03/No.168
14
�
- ▲TOP

- ページ: 16
-
研 究 成 果
Results of Research Activities
誤切断防止用リングアタッチメント型ケーブルカッターの開発
Development of Ring Attachment Type Cable Cutter for Preventing Accidental Disconnection
撤去制御ケーブルの誤切断防止対策に関する概念実証研究より
変電所をはじめ発電所や工場プラントでは、設備取替工事等で保護制御盤と電力用機器
を接続する制御ケーブル(CVV, CVV-S)を撤去する作業において、作業員が誤って運
転中ケーブルを切断してしまう誤切断事象が発生している。そのため変電部門では、制御
ケーブルは末端からリングを通して同一線であることを確認したうえで切断するルールと
なっているが、それでも誤切断が発生するリスクがある。
そこで、ルールを守りつつ安全で確実に使うことができる新たな工具を開発した。
1
執筆者
電力技術研究所
電力設備グループ
杉本 敏文
現場の実態調査
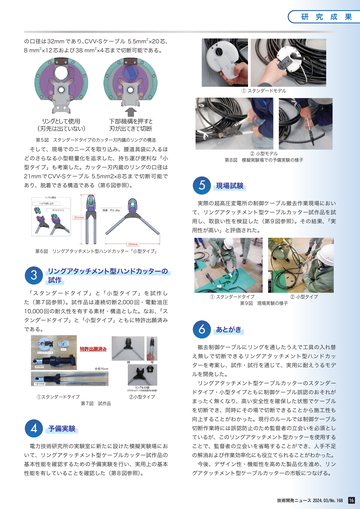
制御ケーブルの撤去作業の様子を第 1 図に示す。
① 大口径品
第 2 図 リング
2
② 小型品
第 3 図 現状のカッター
リングアタッチメント型ハンドカッターの
考案
現場の実態調査にて判明したリスクを解消するため、制
第 1 図 制御ケーブル撤去作業
御ケーブルにリングを通して、器具を入れ替えることな
く、ケーブルを包み込むようにその場でそのまま切断でき
制御ケーブルの撤去作業では、撤去するケーブルを先端
るハンドカッターを考案した。なお、リング単体としても
からたどり、たるませることまではかろうじて可能という
使いやすくなるよう、カッター刃内蔵のリングをヘッド部
状況であるが、制御ケーブルを全線引き抜くことは困難な
として脱着できる構造としたことから「リングアタッチメ
ため、途中切断が効率的であるといえる。しかし、この途
ント型ハンドカッター」と呼ぶこととした。
中切断においては過去から誤切断が発生しており、現状で
まず、大径ケーブルを手動・電動油圧の両方で切断でき
は、監督者立会いのもと、末端からリング(第 2 図参照)
る「スタンダードタイプ」(第 4 図参照)を設計した。
を通して同一線であることを確認したうえで黄色テープの
目印を付けて切断することをルールとしている。
こうしたルールが適用されているものの、それでも誤切
断のリスクは無くなっていない。また、監督者立会いを要
するため現場の人手不足にもつながっている。
このリスクの要因を現場の実態から考察すると、以下の
2 つが考えられた。
(1)リングを通したケーブルとは別のケーブルを切断
リングとは別工具であるカッターを用いているため、
誤って別のケーブルに挿入して切断してしまう。
(2)隣のケーブルも巻き込んで切断
制御ケーブルの切断は、主に市販の大口径カッター(第
3 図①参照)で実施しているため、カッターの刃先が大き
第 4 図 リングアタッチメント型ハンドカッター「スタンダードタイプ」
く、隣の制御ケーブルを巻き込んで切断してしまう。な
リング機能とカッター刃は同一品のカッター刃内蔵のリ
お、小型ハンドカッター(第 3 図②参照)もあるが、多数
ングとし、重量を 5kg 以下の軽量品とした。そして、リン
回の素早い操作を要するラチェット方式のため扱いづら
グとして使用する際にはカッター刃が出ないような安全上
く、実際はあまり使われていない。
の配慮を徹底した。スタンダードタイプのカッター刃内蔵
のリングの構造を第 5 図に示す。カッター刃内蔵のリング
15
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 17
-
研 究 成 果
の口径は 32mm であり、CVV-S ケーブル 5.5mm2×20 芯、
8 mm2×12 芯および 38 mm2×4 芯まで切断可能である。
① スタンダードモデル
第5図 スタンダードタイプのカッター刃内臓のリングの構造
そして、現場でのニーズを取り込み、腰道具袋に入るほ
② 小型モデル
第8図 模擬実験場での予備実験の様子
どのさらなる小型軽量化を追求した、持ち運び便利な「小
型タイプ」も考案した。カッター刃内蔵のリングの口径は
21mm で CVV-S ケーブル 5.5mm2×8 芯まで切断可能で
あり、脱着できる構造である(第 6 図参照)。
5
現場試験
実際の超高圧変電所の制御ケーブル撤去作業現場におい
て、リングアタッチメント型ケーブルカッター試作品を試
用し、取扱い性を検証した(第 9 図参照)。その結果、「実
用性が高い」と評価された。
第6図 リングアタッチメント型ハンドカッター「小型タイプ」
3
リングアタッチメント型ハンドカッターの
試作
「 ス タ ン ダ ー ド タ イ プ 」 と「 小 型 タ イ プ 」 を 試 作 し
① スタンダードタイプ ② 小型タイプ
第9図 現場実験の様子
た(第 7 図参照)。試作品は連続切断 2,000 回・電動油圧
10,000 回の耐久性を有する素材・構造とした。なお、「ス
タンダードタイプ」と「小型タイプ」ともに特許出願済み
である。
6
あとがき
撤去制御ケーブルにリングを通したうえで工具の入れ替
え無しで切断できるリングアタッチメント型ハンドカッ
ターを考案し、試作・試行を通じて、実用に耐えうるモデ
ルを開発した。
リングアタッチメント型ケーブルカッターのスタンダー
①スタンダードタイプ ②小型タイプ
第7図 試作品
4
予備実験
ドタイプ・小型タイプともに制御ケーブル誤認のおそれが
まったく無くなり、高い安全性を確保した状態でケーブル
を切断でき、同時にその場で切断できることから施工性も
向上することがわかった。現行のルールでは制御ケーブル
切断作業時には誤認防止のため監督者の立会いを必須とし
ているが、このリングアタッチメント型カッターを使用する
電力技術研究所の実験室に新たに設けた模擬実験場にお
ことで、監督者の立会いを省略することができ、人手不足
いて、リングアタッチメント型ケーブルカッター試作品の
の解消および作業効率化にも役立てられることがわかった。
基本性能を確認するための予備実験を行い、実用上の基本
今後、デザイン性・機能性を高めた製品化を進め、リン
性能を有していることを確認した(第 8 図参照)。
グアタッチメント型ケーブルカッターの市販につなげる。
技術開発ニュース 2024.03/No.168
16
�
- ▲TOP
- ページ: 18
- Results of Research Activities
分割式特殊柱の開発
Development of Split Type Special Pole
コストダウン、施工効率向上、お客さまニーズの達成、環境負荷低減の実現
執筆者
近年の電力業界を取り巻く環境変化を踏まえ、さらなるコストダウン、施工効率向上、お
客さまニーズの達成、環境負荷低減が求められている。一方で、従来の継台式特殊柱はそ
の構造から高コスト、用地交渉難航、リユース不可といった課題があった。このため、従来
品と同等の長期信頼性確保を前提に、これらの課題を解決した分割式特殊柱を開発した。
1
エンジニアリングセンター
用品グループ
小森 隼登
2 種類に大別される。それぞれの接続方式の運搬費・製造
背景および目的
費・工期を比較検討し、最もメリットのあるフランジ式を
採用することとした(第 2 表)。
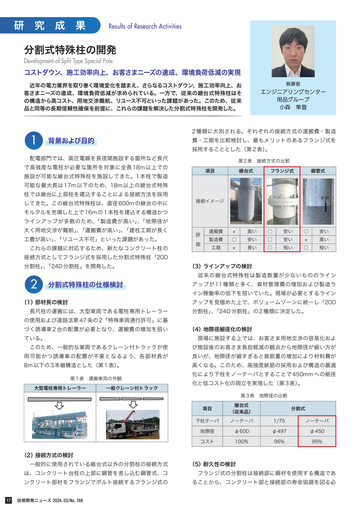
配電部門では、高圧電線を長径間施設する箇所など長尺
第 2 表 接続方式の比較
で高強度な電柱が必要な箇所を対象に全長 18m 以上での
項目
施設が可能な継台式特殊柱を施設してきた。1 本柱で製造
継台式
フランジ式
鋼管式
可能な最大長は 17m 以下のため、18m 以上の継台式特殊
柱では継台に上部柱を建込することによる接続方法を採用
してきた。この継台式特殊柱は、直径 600m の継台の中に
接続イメージ
モルタルを充填した上で 16m の 1 本柱を建込する構造かつ
ラインアップが多数のため、
「製造費が高い」、「地際径が
工費が高い」、「リユース不可」といった課題があった。
これらの課題に対応するため、新たなコンクリート柱の
接続方式としてフランジ式を採用した分割式特殊柱「20D
分割柱」、「24D 分割柱」を開発した。
2
分割式特殊柱の仕様検討
(1)部材長の検討
運搬費
×
高い
○
安い
○
安い
価
太く用地交渉が難航」、「運搬費が高い」、「建柱工期が長く
評
研 究 成 果
製造費
○
安い
○
安い
×
高い
工期
×
長い
○
短い
○
短い
(3)ラインアップの検討
従来の継台式特殊柱は製造数量が少ないもののライン
アップが 11 種類と多く、資材管理費の増加および製造ラ
イン稼働率の低下を招いていた。現場が必要とするライン
アップを見極めた上で、ボリュームゾーンに統一し「20D
長尺柱の運搬には、大型車両である電柱専用トレーラー
分割柱」、「24D 分割柱」の 2 種類に決定した。
の使用および道路法第 47 条の 2「特殊車両通行許可」に基
づく誘導車 2 台の配置が必要となり、運搬費の増加を招い
ている。
現場に施設する上では、お客さま用地交渉の容易化およ
このため、一般的な車両であるクレーン付トラックが使
び施設後のお客さま負担軽減の観点から地際径が細い方が
用可能かつ誘導車の配置が不要となるよう、各部材長が
良いが、地際径が細すぎると鉄筋量の増加により材料費が
8m 以下の 3 本継構造とした(第 1 表)。
高くなる。このため、高強度鉄筋の採用および構造の最適
第 1 表 運搬車両の外観
大型電柱専用トレーラー
一般クレーン付トラック
(2)接続方式の検討
一般的に使用されている継台式以外の分割柱の接続方式
は、コンクリート台柱の上部に鋼管を差し込む鋼管式、コ
ンクリート部材をフランジでボルト接続するフランジ式の
17
(4)地際径細径化の検討
技術開発ニュース 2024.03/No.168
化により下柱をノーテーパとすることで 450mm への細径
化と低コスト化の両立を実現した(第 3 表)。
第 3 表 地際径の比較
項目
継台式
(従来品)
下柱テーパ
ノーテーパ
1/75
ノーテーパ
地際径
φ 600
φ 497
φ 450
コスト
100%
96%
95%
分割式
(5)耐久性の検討
フランジ式の分割柱は接続部に鋼材を使用する構造であ
ることから、コンクリート部と接続部の寿命協調を図る必
�
- ▲TOP
- ページ: 19
- 要がある。過去の検討にて、コンクリートの中性化の進展
後に内部の鉄筋が腐食し始め強度低下に至るまでの期間と
して、コンクリート部の期待寿命を 80 年と算出している
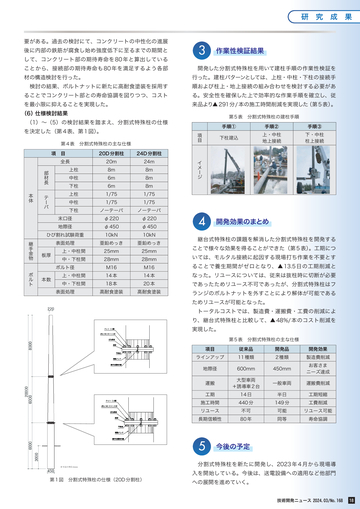
3
作業性検証結果
ことから、接続部の期待寿命も 80 年を満足するよう各部
開発した分割式特殊柱を用いて建柱手順の作業性検証を
材の構造検討を行った。
行った。建柱パターンとしては、上柱・中柱・下柱の接続手
検討の結果、ボルトナットに新たに高耐食塗装を採用す
順および柱上・地上接続の組み合わせを検討する必要があ
ることでコンクリート部との寿命協調を図りつつ、コスト
る。安全性を確保した上で効率的な作業手順を確立し、従
を最小限に抑えることを実現した。
来品より▲ 291分/ 本の施工時間削減を実現した(第 5 表)。
(6)仕様検討結果
第 5 表 分割式特殊柱の建柱手順
(1)~(5)の検討結果を踏まえ、分割式特殊柱の仕様
項目
を決定した(第 4 表、第 1 図)。
第 4 表 分割式特殊柱の主な仕様
20D 分割柱
24D 分割柱
20m
24m
上柱
8m
8m
中柱
6m
8m
下柱
6m
8m
上柱
1/75
1/75
全長
部材長
テーパ
中柱
1/75
1/75
下柱
ノーテーパ
ノーテーパ
手順①
手順②
手順③
下柱建込
上・中柱
地上接続
下・中柱
柱上接続
イメージ
項 目
本体
継手金物
ボルト
研 究 成 果
4
末口径
φ 220
φ 220
地際径
φ 450
φ 450
ひび割れ試験荷重
10kN
10kN
表面処理
亜鉛めっき
亜鉛めっき
上・中柱間
25mm
25mm
中・下柱間
28mm
28mm
M16
M16
14 本
14 本
なった。リユースについては、従来は抜柱時に切断が必要
18 本
20 本
高耐食塗装
高耐食塗装
であったためリユース不可であったが、分割式特殊柱はフ
板厚
ボルト径
本数
上・中柱間
中・下柱間
表面処理
開発効果のまとめ
継台式特殊柱の課題を解消した分割式特殊柱を開発する
ことで様々な効果を得ることができた(第 5 表)。工期につ
いては、モルタル接続に起因する現場打ち作業を不要とす
ることで養生期間がゼロとなり、▲ 13.5 日の工期削減と
ランジのボルトナットを外すことにより解体が可能である
ためリユースが可能となった。
トータルコストでは、製造費・運搬費・工費の削減によ
り、継台式特殊柱と比較して、▲ 48%/ 本のコスト削減を
実現した。
第 5 表 分割式特殊柱の主な仕様
項目
従来品
開発品
開発効果
ラインアップ
11 種類
2 種類
製造費削減
地際径
600mm
450mm
お客さま
ニーズ達成
運搬
大型車両
+誘導車 2 台
一般車両
運搬費削減
工期
14 日
半日
工期短縮
施工時間
440 分
149 分
工費削減
リユース
不可
可能
リユース可能
長期信頼性
80 年
同等
寿命協調
5
※寸法の単位はmm
第 1 図 分割式特殊柱の仕様(20D 分割柱)
今後の予定
分割式特殊柱を新たに開発し、2023 年 4 月から現場導
入を開始している。今後は、送電設備への適用など他部門
への展開を進めていく。
技術開発ニュース 2024.03/No.168
18
�
- ▲TOP
- ページ: 20
- Results of Research Activities
給電系共通プラットフォームの開発
Deployment of universal platform for systems to support power system operations
給電系システム向け共通インフラ開発による新たなシステム開発・保守環境の整備
執筆者
既存の給電系システムは、システム毎での構築が起因して設備の肥大化、開発・保守費
用の増大化が課題であった。そこで、これらの課題解決を目的にデータ連係機能、スト
レージ機能、WEB 表示機能を共通インフラ化した給電系共通プラットフォームを開発し
た。また、大規模災害対応力の強化を目的に 2 拠点化を実現した。
1
系統運用部
系統システム開発グループ
北原 遼・長瀬 友彦
給電系共通PF
背 景
共通ストレージ機能
給電制御所システムのような指令制御業務を扱うシステ
NAS1
ム以外の系統運用業務を支援する多くのシステム(以下、
NAS2
給電系システム)は、従来、支援ニーズ毎に個別のシステ
NAS3
ム開発を指向してきた。本開発方法は、入力から出力まで
…
研 究 成 果
一貫した機能開発をするため、品質管理が容易、開発ベン
Cシス
テム
WEB表示機能
新規
システム
・・・
データ連係機能
配信
サーバ
UTM
拠点FW
給制FW
連係
サーバ
NASn
第 2 図 給電系共通 PF の構成概念
ようなデメリットも存在する。
増大
Bシス
テム
ネットワーク集約装置
ダの責任区分が明確というメリットがあるものの、以下の
・各システムで重複する機能を開発することによる費用
Aシス
テム
(1)データ連係機能
データ連係機能には、データセンターなどで用いられる
・重畳する機器の導入と保守に係る費用の増大
・各システムが個々に情報を保有することによるデータ連
ネットワーク構成法のひとつであるスパインリーフ型ネッ
トワーク(spine-leaf architecture)を採用した。本方式
係の複雑化
今回、従前の給電系システム開発で必要としていたイン
は、末端機器が接続するリーフスイッチとその間を接続す
フラストラクチャを共通にして外出しし、給電系システム
るスパインスイッチの 2 階層でネットワークを構成する方
に各機能の提供を可能とした給電系共通プラットフォーム
式で以下の特徴がある。
(以下、給電系共通 PF)を開発した。これにより、システ
ムの新規開発時の設備導入費用や保守に係る費用の削減お
よびシステム間データ連係の整理を図ったため紹介する。
①データ連係の高速化
システムを個別に構成する場合と比べ、連係経路上の
機器が少なく、システム間接続に係る通信時間を短縮
可能。
②拡張性の確保
Aシステムが必要とするデータ連係
Bシステムが
〃
Cシステムが
〃
Dシステムが
〃
Aシステム
スイッチの追加によりネットワーク規模を容易に拡張
Aシステム
Bシステム
ストレージ機能
Cシステム
Bシステム
Dシステム
可能。
ストレージ機能
WEB表示機能
WEB表示機能
重複機能の開発に
よる費用増大
データ連係の
複雑化
ストレージ機能
従来システム
L3
スイッチ
データ連係機能
WEB表示機能
Cシステム
通信ネットワーク
給電系共通PF
ストレージ機能
共通ストレージ機能
WEB表示機能
WEB表示機能
Dシステム
給電系共通PF
L2
スイッチ
スパイン
スイッチ
スパイン
スイッチ
スパイン
スイッチ
給電系共通 PF について
能、WEB 表示機能を具備している。
技術開発ニュース 2024.03/No.168
リーフ
スイッチ
・・・
②スイッチ追加により
容易にネットワーク規模の
拡大が可能
①連係経路が短く
高速通信が可能
給電系共通 PF は、データ連係機能、共通ストレージ機
19
L2
スイッチ
既存ネットワーク
第 1 図 給電系システムの現状と課題・解決策
2
L2
スイッチ
L2
スイッチ
各機能の共通化
L3
スイッチ
リーフ
スイッチ
リーフ
スイッチ
リーフ
スイッチ
リーフ
スイッチ
リーフ
スイッチ
・・・
スパインリーフ型ネットワーク
第 3 図 スパインリーフ型ネットワークの特徴
�
- ▲TOP
- ページ: 21
-
研 究 成 果
また、給電系共通 PF は、他のネットワークにアクセス
するため、ルータ機能とセキュリティ機能を具備すること
で情報系システムとも接続できるようネットワークを構成
3
給電系共通 PF の開発効果
した。加えて、給電系共通 PF 内のネットワークを冗長化
2023 年 4 月に給電系共通 PF を運用開始した。これによ
することで業務継続性を担保している。
り、以下の結果を得た。
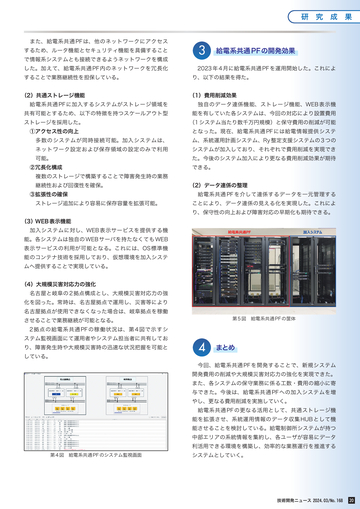
(2)共通ストレージ機能
給電系共通 PF に加入するシステムがストレージ領域を
共有可能とするため、以下の特徴を持つスケールアウト型
ストレージを採用した。
①アクセス性の向上
(1)費用削減効果
独自のデータ連係機能、ストレージ機能、WEB 表示機
能を有していた各システムは、今回の対応により設置費用
(1 システム当たり数千万円規模)と保守費用の削減が可能
となった。現在、給電系共通 PF には給電情報提供システ
多数のシステムが同時接続可能。加入システムは、
ム、系統運用計画システム、Ry 整定支援システムの 3 つの
ネットワーク設定および保存領域の設定のみで利用
システムが加入しており、それぞれで費用削減を実現でき
可能。
た。今後のシステム加入により更なる費用削減効果が期待
②冗長化構成
複数のストレージで構築することで障害発生時の業務
継続性および回復性を確保。
③拡張性の確保
ストレージ追加により容易に保存容量を拡張可能。
できる。
(2)データ連係の整理
給電系共通 PF を介して連係するデータを一元管理する
ことにより、データ連係の見える化を実現した。これによ
り、保守性の向上および障害対応の早期化も期待できる。
(3)WEB 表示機能
加入システムに対し、WEB 表示サービスを提供する機
能。各システムは独自の WEB サーバを持たなくても WEB
表示サービスの利用が可能となる。これには、OS 標準機
能のコンテナ技術を採用しており、仮想環境を加入システ
ムへ提供することで実現している。
(4)大規模災害対応力の強化
名古屋と岐阜の 2 拠点構成とし、大規模災害対応力の強
化を図った。常時は、名古屋拠点で運用し、災害等により
名古屋拠点が使用できなくなった場合は、岐阜拠点を稼働
第 5 図 給電系共通 PF の筐体
させることで業務継続が可能となる。
2 拠点の給電系共通 PF の稼働状況は、第 4 図で示すシ
ステム監視画面にて運用者やシステム担当者に共有してお
り、障害発生時や大規模災害時の迅速な状況把握を可能と
している。
4
まとめ
今回、給電系共通 PF を開発することで、新規システム
開発費用の削減や大規模災害対応力の強化を実現できた。
また、各システムの保守業務に係る工数・費用の縮小に寄
与できた。今後は、給電系共通 PF への加入システムを増
やし、更なる費用削減を実施していく。
給電系共通 PF の更なる活用として、共通ストレージ機
能を拡張させ、系統運用情報のデータ収集 HUB として機
能させることを検討している。給電制御所システムが持つ
中部エリアの系統情報を集約し、各ユーザが容易にデータ
利活用できる環境を構築し、効率的な業務運行を推進する
第 4 図 給電系共通 PF のシステム監視画面
システムとしていく。
技術開発ニュース 2024.03/No.168
20
�
- ▲TOP
- ページ: 22
-
研 究 成 果
Results of Research Activities
復水器洗浄装置ボールカウンタの開発と精度向上
New development of sponge rubber ball counter for a condenser cleaning system
工業用カウンタを応用した光学式ボールカウンタの開発
執筆者
従来の復水器洗浄装置ボールカウンタは、ボールを 1 個ずつカウントするため細い配管
を複数使用しており、詰まり等によるトラブルが多発していた。そこで、幅広に流れる物
体を複数個同時にカウントできる光学式の工業用カウンタを応用し、トラブルの無いボー
ルカウンタを開発したので紹介する。
1
研究の背景
電力技術研究所
機械グループ
石川 明
カウンタ
火力発電所の復水器洗浄装置に用いられているボールカ
カ
メ
ラ
流れ
ウンタは、配管内を通過する洗浄用のボールを LED センサ
照
明
流れ
によりカウントしている。この装置は、ボールを 1 個ずつ
カウントするため、ボール 1 個のみが通過できる細い配管
を用いており、貝等による詰まりが発生しやすい。また、
第 1 図 従来式(左)と光学式(右)のイメージ
貝の詰まりやセンサ劣化による、エラー発生時(洗浄ボー
ルの過不足による警報発報時)に、現場で装置の分解清掃
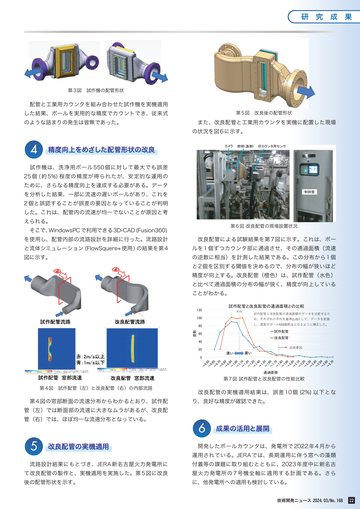
ボールの重なりについては、流速とボールのカウント
および、人による数量確認を実施する必要がある。
速度(600 個 / 分)をもとに、300mm 幅の範囲を 600 個
夏場等の特定時期に故障が集中し、故障時の対応に労力
ボールが 1.5m/s で、ランダムに 1 分間で通過すると想定
を要していることから、抜本的な装置の改良を検討して
した。1 万回のモンテカルロシミュレーションを行い、ボー
欲しいとの要望が、JERA 新名古屋火力発電所から研究所
ルの重なりの頻度を予想した。第 2 図に結果を示す。中心
に寄せられた。発電所のニーズをまとめると次のとおりで
間隔 1.25cm(0.5 φ ) 以下はボールを 1 個とカウントする
あった。
可能性が高いが、その個数は 10 個 (2%) 程度であり、精度
①ボールの詰まりが発生しない構造
(太い配管)
としたい。
上は大きな問題とならないことが予想された。
②センサのトラブルが少ない画像・光学式としたい。
③カウントの誤差は 5% 以下で極力少ない方が良い。
④価格は現行カウンタと同程度に抑えたい。
⑤できるだけ短期間で実用化したい。
2
基本構想の検討
第 2 図 モンテカルロシミュレーションの結果
画像・光学式のカウンタを中心に、有望と考えられる
メーカーに聞き取り調査を実施した。その結果、ベルトコ
配 管 は 100 φ で、 こ れ が カ ウ ン タ 窓 部 で 52mm×
ンベアを流れる部品を光学的にカウントする工業用カウン
300mm となることから、流れの断面積が約 2 倍に拡大す
タを利用することが、開発期間や価格の面も含め総合的に
る。そのままでは、カウンタ部で流れが広がらないことか
有望と考えられた。(株)光伸舎の工業用カウンタを適用
ら、配管の曲がりを利用し、流れを拡散することとした。
することとし、関係者で協議の上、基本構想を次のとおり
WindowsPC で利用できる流体シミュレーションソフト
とした。
(FlowSquere+) を用いて、簡易形状でシミュレーショを
①ボールのカウンタ部は、縦方向(流れと直角方向)に
行い、流れが全体に拡散することを確認した。
30cm 程度必要。
②ボールの重なりは誤差要因となるので、流れを拡散さ
せ、ボールを分散させる。
ボール (26mm φ ) の詰りが発生しないためには、配管
試作機の実機適用
の全ての場所において、ボール 2 個が並んで通過できる幅
配管の製作と、実機適用に関しては、JERA 新名古屋火
が必要となる。①を踏まえカウント部の断面を 52mm×
力発電所にて実施した。第 3 図にその配管形状を示す。
300mm とした。
画像・光学式カウンタのイメージを第 1 図に示す。
21
3
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 23
-
研 究 成 果
第 3 図 試作機の配管形状
配管と工業用カウンタを組み合わせた試作機を実機適用
した結果、ボールを実用的な精度でカウントでき、従来式
のような詰まりの発生は皆無であった。
第 5 図 改良後の配管形状
また、改良配管と工業用カウンタを実機に配置した現場
の状況を図 6 に示す。
4
精度向上をめざした配管形状の改良
カメラ
照明(裏側)
旧カウンタ用センサ
試作機は、洗浄用ボール 550 個に対して最大でも誤差
25 個 ( 約 5%) 程度の精度が得られたが、安定的な運用の
ために、さらなる精度向上を達成する必要がある。データ
を分析した結果、一部に流速の遅いボールがあり、これを
制御盤
2 個と誤認することが誤差の要因となっていることが判明
した。これは、配管内の流速が均一でないことが原因と考
えられる。
第 6 図 改良配管の現場設置状況
そこで、WindowsPC で利用できる 3D-CAD(Fusion360)
を使用し、配管内部の流路設計を詳細に行った。流路設計
改良配管による試験結果を第 7 図に示す。これは、ボー
と流体シミュレーション(FlowSquere+ 使用 )の結果を第 4
ルを 1 個ずつカウンタ部に通過させ、その通過面積(流速
図に示す。
の逆数に相当)を計測した結果である。この分布から 1 個
と 2 個を区別する閾値を決めるので、分布の幅が狭いほど
精度が向上する。改良配管(橙色)は、試作配管(水色)
と比べて通過面積の分布の幅が狭く、精度が向上している
ことがわかる。
120
試作配管と改良配管の通過面積との比較
平均
試作配管と改良配管の通過面積のデータを比較するた
100
め、それぞれの平均を基準(1.0)として、データを変換
し、度数がボール550個相当となるように補正した。
度数
80
試作配管
60
改良配管
40
20
0
速い
誤差要因
遅い
通過面積
第 7 図 試作配管と改良配管の性能比較
第 4 図 試作配管(左)と改良配管(右)の内部流路
第 4 図の窓部断面の流速分布からわかるとおり、試作配
改良配管の実機適用結果は、誤差 10 個 (2%) 以下とな
り、良好な精度が確認できた。
管(左)では断面部の流速に大きなムラがあるが、改良配
管(右)では、ほぼ均一な流速分布となっている。
5
改良配管の実機適用
6
成果の活用と展開
開発したボールカウンタは、発電所で 2022 年 4 月から
運用されている。JERA では、長期運用に伴う窓への藻類
流路設計結果にもとづき、JERA 新名古屋火力発電所に
付着等の課題に取り組むとともに、2023 年度中に新名古
て改良配管の製作と、実機適用を実施した。第 5 図に改良
屋火力発電所の 7 号機全軸に適用する計画である。さら
後の配管形状を示す。
に、他発電所への適用も検討している。
技術開発ニュース 2024.03/No.168
22
�
- ▲TOP
- ページ: 24
-
研 究 成 果
Results of Research Activities
風車ダウンコンダクタ導通確認手法の開発
Research on the methods for confirming the conductivity of wind turbine down conductors.
風車点検のさらなる効率化、安全性向上を目指して
風車に落ちた雷を安全に逃がす目的で設置されたダウンコンダクタは、定期的に導通確
認をする必要がある。現在、この点検は人がロープでブレードにぶら下がり実施してお
り、より効率的な手法が求められていた。今回、簡易に導通確認できる手法を考案し、ド
ローンを用いた実風車での検証によりその有効性が確認できたので報告する。
執筆者
電力技術研究所
機械グループ
鹿島 直二
1
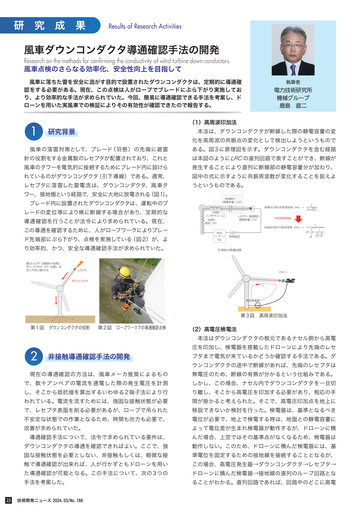
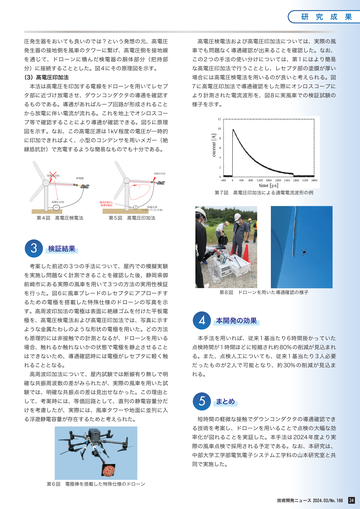
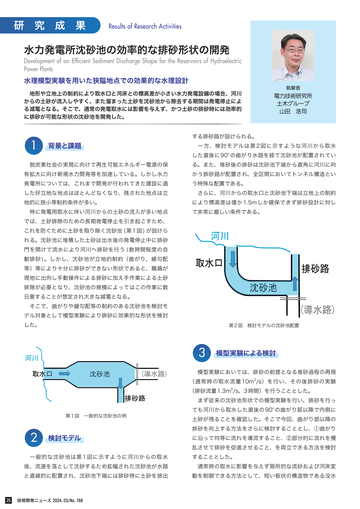
(1)高周波印加法
研究背景
本法は、ダウンコンダクタが断線した際の静電容量の変
化を高周波の共振点の変化として検出しようというもので
風車の落雷対策として、ブレード(羽根)の先端に避雷
ある。図 3 に原理図を示す。ダウンコンダクタを含む経路
針の役割をする金属製のレセプタが配置されており、これと
は本図のようにLRC の直列回路で表すことができ、断線が
風車のタワーを電気的に接続するためにブレード内に設けら
発生することにより直列に断線部の静電容量分が加わり、
れているのがダウンコンダクタ(引下導線)である。通常、
図中の式に示すように共振周波数が変化することを捉えよ
レセプタに落雷した雷電流は、ダウンコンダクタ、風 車タ
うというものである。
ワー、接地極という経路で、安全に大地に放電される(図1)
。
断線部の
静電容量[Cd]
ブレード内に設置されたダウンコンダクタは、運転中のブ
レードの変位等により稀に断線する場合があり、定期的な
導通確認を行うことが法令により求められている。現在、
この導通を確認するために、人がロープワークによりブレー
ド先端部にぶら下がり、点検を実施している(図 2)が、よ
り効率的、かつ、安全な導通確認手法が求められていた。
雷はレセプタ(避雷針の役割)、
ダウンコンダクタ、タワーを通り、安
全に大地に導かれる
断線なし時の共振周波数(Hz)=
回路の
インダクタンス[L]
レセプタ-電極間の
静電容量[Ct]
回路の
抵抗[R]
共振周波数増加
2π
断線あり時の共振周波数(Hz)=
Amp
SG
2π
制限抵抗
1
1
1
1
+
1
計測系の等価回路
レセプタ
ドローン
ダウンコンダクタ
I
高周波電源
第 3 図 高周波印加法
C o p y r i g h t © C h u b u E l e c t r i c P o we r C o . , I n c . A l l r i g h t s r e s e r v e d .
第 1 図 ダウンコンダクタの役割
第 2 図 ロープワークでの導通確認点検
(2)高電圧検電法
本法はダウンコンダクタの根元であるナセル側から高電
2
23
非接触導通確認手法の開発
圧を印加し、検電器を搭載したドローンにより先端のレセ
プタまで電気が来ているかどうか確認する手法である。ダ
ウンコンダクタの途中で断線があれば、先端のレセプタは
現在の導通確認の方法は、風車メーカ推奨によるもの
無電圧のため、断線の有無が分かるという仕組みである。
で、数十アンペアの電流を通電した際の発生電圧を計測
しかし、この場合、ナセル内でダウンコンダクタを一旦切
し、そこから抵抗値を算出するいわゆる 2 端子法により行
り離し、そこから高電圧を印加する必要があり、相応の手
われている。電流を流すためには、強固な接触状態が必要
間が掛かると考えられた。そこで、高電圧印加点を地上に
で、レセプタ表面を削る必要があるが、ローブで吊られた
移設できないか検討を行った。検電器は、基準となるべき
不安定な状態での作業となるため、時間も労力も必要で、
電位が必要で、地上で検電する時は、地面との静電容量に
改善が求められていた。
よって電位差が生まれ検電器が動作するが、ドローンに積
導通確認手法について、法令で求められている要件は、
んだ場合、上空ではその基準点がなくなるため、検電器は
ダウンコンダクタの導通を確認できればよい。ここで、強
動作しない。このため、ドローンに積んだ検電器には、基
固な接触状態を必要としない、非接触もしくは、軽微な接
準電位を固定するための接地線を接続することとなるが、
触で導通確認が出来れば、人が行かずともドローンを用い
この場合、高電圧発生器→ダウンコンダクタ→レセプタ→
た導通確認が可能となる。この手法について、次の 3 つの
ドローンに積んだ検電器→接地線の直列のループ回路とな
手法を考案した。
ることがわかる。直列回路であれば、回路中のどこに高電
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 25
-
研 究 成 果
圧発生器をおいても良いのでは?という発想の元、高電圧
高電圧検電法および高電圧印加法については、実際の風
発生器の接地側を風車のタワーに繋げ、高電圧側を接地線
車でも問題なく導通確認が出来ることを確認した。なお、
を通じて、ドローンに積んだ検電器の胴体部分(把持部
この 2 つの手法の使い分けについては、第 1 にはより簡易
分)に接続することとした。図 4 にその原理図を示す。
な高電圧印加法で行うこととし、レセプタ部の塗膜が厚い
(3)高電圧印加法
場合には高電圧検電法を用いるのが良いと考えられる。図
本法は高電圧を印加する電線をドローンを用いてレセプ
7 に高電圧印加法で導通確認をした際にオシロスコープに
タ部に近づけ放電させ、ダウンコンダクタの導通を確認す
より計測された電流波形を、図 8 に実風車での検証試験の
るものである。導通があればループ回路が形成されること
様子を示す。
から放電に伴い電流が流れる。これを地上でオシロスコー
プ等で確認することにより導通が確認できる。図 5 に原理
図を示す。なお、この高電圧源は 1kV 程度の電圧が一時的
に印加できればよく、小型のコンデンサを用いメガー(絶
縁抵抗計)で充電するような簡易なものでも十分である。
高電圧印加
高電圧印加
検電器
I
第 7 図 高電圧印加法による通電電流波形の例
高電圧印加
HV
第 4 図 高電圧検電法
3
電流を検出し
導通を確認
V
高電圧源
(小型コンデンサに充電)
第 5 図 高電圧印加法
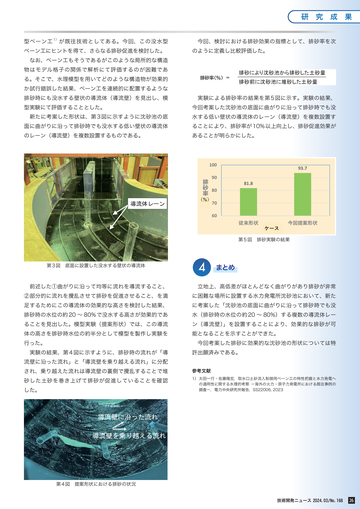
検証結果
考案した前述の 3 つの手法について、屋内での模擬実験
を実施し問題なく計測できることを確認した後、静岡県御
前崎市にある実際の風車を用いて 3 つの方法の実用性検証
第 8 図 ドローンを用いた導通確認の様子
を行った。図 6 に風車ブレードのレセプタにアプローチす
るための電極を搭載した特殊仕様のドローンの写真を示
す。高周波印加法の電極は表面に絶縁ゴムを付けた平板電
極を、高電圧検電法および高電圧印加法では、写真に示す
ような金属たわしのような形状の電極を用いた。どの方法
4
本開発の効果
も原理的には非接触での計測となるが、ドローンを用いる
本手法を用いれば、従来 1 基当たり 6 時間掛かっていた
場合、触れるか触れないかの状態で電極を静止させること
点検時間が 1 時間ほどに短縮され約 80% の削減が見込まれ
はできないため、導通確認時には電極がレセプタに軽く触
る。また、点検人工についても、従来 1 基当たり 3 人必要
れることとなる。
だったものが 2 人で可能となり、約 30% の削減が見込ま
高周波印加法について、屋内試験では断線有り無しで明
れる。
確な共振周波数の差がみられたが、実際の風車を用いた試
験では、明確な共振点の差は見出せなかった。この理由と
して、考案時には、等価回路として、直列の静電容量分だ
けを考慮したが、実際には、風車タワーや地面に並列に入
る浮遊静電容量が存在するためと考えられた。
5
まとめ
短時間の軽微な接触でダウンコンダクタの導通確認でき
る技術を考案し、ドローンを用いることで点検の大幅な効
率化が図れることを実証した。本手法は 2024 年度より実
際の風車点検で採用される予定である。なお、本研究は、
中部大学工学部電気電子システム工学科の山本研究室と共
同で実施した。
第 6 図 電極棒を搭載した特殊仕様のドローン
技術開発ニュース 2024.03/No.168
24
�
- ▲TOP
- ページ: 26
-
研 究 成 果
Results of Research Activities
水力発電所沈砂池の効率的な排砂形状の開発
Development of an Efficient Sediment Discharge Shape for the Reservoirs of Hydroelectric
Power Plants
水理模型実験を用いた狭隘地点での効果的な水理設計
執筆者
地形や立地上の制約により取水口と河床との標高差が小さい水力発電設備の場合、河川
からの土砂が流入しやすく、また溜まった土砂を沈砂池から除去する期間は発電停止によ
る減電となる。そこで、通常の発電取水には影響を与えず、かつ土砂の排砂時には効率的
に排砂が可能な形状の沈砂池を開発した。
電力技術研究所
土木グループ
山田 浩司
1
背景と課題
する排砂路が設けられる。
一方、検討モデルは第 2 図に示すような河川から取水
した直後に 90° の曲がり水路を経て沈砂池が配置されてい
脱炭素社会の実現に向けて再生可能エネルギー電源の保
る。また、堆砂後の排砂は沈砂池下端から直角に河川に向
有拡大に向け新規水力開発等を加速している。しかし水力
かう排砂路が配置され、全区間においてトンネル構造とい
発電所については、これまで開発が行われてきた建設に適
う特殊な配置である。
した好立地な地点はほとんどなくなり、残された地点は立
さらに、河川からの取水口と沈砂池下端は立地上の制約
地的に狭小等制約条件が多い。
により標高差は僅か 1.5m しか確保できず排砂設計に対し
特に発電用取水に伴い河川からの土砂の流入が多い地点
て非常に厳しい条件である。
では、土砂排除のための長期発電停止を引き起こすため、
これを防ぐために土砂を取り除く沈砂池 ( 第 1 図 ) が設けら
れる。沈砂池に堆積した土砂は出水後の発電停止中に排砂
門を開けて流水により河川へ排砂を行う ( 数時間程度の自
取水口
動排砂 )。しかし、沈砂池が立地的制約(曲がり、緩勾配
排砂路
等)等により十分に排砂ができない形状であると、職員が
現地に出向し手動操作による排砂に加え手作業による土砂
排除が必要となり、沈砂池の規模によってはこの作業に数
日要することが想定され大きな減電となる。
そこで、曲がりや緩勾配等の制約のある沈砂池を検討モ
沈砂池
デル対象として模型実験により排砂に効果的な形状を検討
した。
第 2 図 検討モデルの沈砂池配置
3
模型実験による検討
模型実験においては、排砂の前提となる堆砂過程の再現
(通常時の取水流量 10m3/s)を行い、その後排砂の実験
(排砂流量 1.3m3/s、3 時間)を行うこととした。
まず従来の沈砂池形状での模型実験を行い、排砂を行っ
第 1 図 一般的な沈砂池の例
2
25
検討モデル
ても河川から取水した直後の 90° の曲がり部以降で内側に
土砂が残ることを確認した。そこで今回、曲がり部以降の
排砂を向上する方法をさらに検討することとし、①曲がり
に沿って均等に流れを導流すること、②部分的に流れを攪
乱させて排砂を促進させること、を両立できる方法を検討
一般的な沈砂池は第 1 図に示すように河川からの取水
することとした。
後、流速を落として沈砂するため拡幅された沈砂池が水路
通常時の取水に影響を与えず局所的な流砂および河床変
と直線的に配置され、沈砂池下端には排砂時に土砂を排出
動を制御できる方法として、短い板状の構造物である没水
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 27
- 型ベーン工 1) が既往技術としてある。今回、この没水型
今回、検討における排砂効果の指標として、排砂率を次
ベーン工にヒントを得て、さらなる排砂促進を検討した。
のように定義し比較評価した。
なお、ベーン工もそうであるがこのような局所的な構造
物はモデル格子の関係で解析にて評価するのが困難であ
る。そこで、水理模型を用いてどのような構造物が効果的
排砂率(%) =
か試行錯誤した結果、ベーン工を連続的に配置するような
排砂により沈砂池から排砂した土砂量
排砂前に沈砂池に堆砂した土砂量
排砂時にも没水する壁状の導流体(導流壁)を見出し、模
実験による排砂率の結果を第 5 図に示す。実験の結果、
型実験にて評価することとした。
今回考案した沈砂池の底面に曲がりに沿って排砂時でも没
新たに考案した形状は、第 3 図に示すように沈砂池の底
水する低い壁状の導流体のレーン(導流壁)を複数設置す
面に曲がりに沿って排砂時でも没水する低い壁状の導流体
ることにより、排砂率が 10% 以上向上し、排砂促進効果が
のレーン(導流壁)を複数設置するものである。
あることが明らかにした。
100
93.7
90
81.8
80
導流体レーン
(%)
(%)
研 究 成 果
70
60
従来形状
ケース
今回提案形状
第 5 図 排砂実験の結果
第 3 図 底面に設置した没水する壁状の導流体
4
まとめ
前述した①曲がりに沿って均等に流れを導流すること、
立地上、高低差がほとんどなく曲がりがあり排砂が非常
②部分的に流れを攪乱させて排砂を促進させること、を満
に困難な場所に設置する水力発電所沈砂池において、新た
足するためにこの導流体の効果的な高さを検討した結果、
に考案した「沈砂池の底面に曲がりに沿って排砂時でも没
排砂時の水位の約 20 ~ 80% で没水する高さが効果的であ
水(排砂時の水位の約 20 ~ 80%)する複数の導流体レー
ることを見出した。模型実験(提案形状)では、この導流
ン(導流壁)」を設置することにより、効果的な排砂が可
体の高さを排砂時水位の約半分として模型を製作し実験を
能となることを示すことができた。
行った。
今回考案した排砂に効果的な沈砂池の形状については特
実験の結果、第 4 図に示すように、排砂時の流れが「導
許出願済みである。
流壁に沿った流れ」と「導流壁を乗り越える流れ」に分配
され、乗り越えた流れは導流壁の裏側で攪乱することで堆
砂した土砂を巻き上げて排砂が促進していることを確認
した。
参考文献
1) 太田一行・佐藤隆宏,取水口土砂流入制御用ベーン工の特性把握と水力発電へ
の適用性に関する水理的考察 -海外の火力・原子力発電所における既往事例の
調査-,電力中央研究所報告,SS22006, 2023
導流壁に沿った流れ
導流壁を乗り越える流れ
第 4 図 提案形状における排砂の状況
技術開発ニュース 2024.03/No.168
26
�
- ▲TOP
- ページ: 28
-
研 究 成 果
Results of Research Activities
レーザー計測機が捉えた送電鉄塔下の
雨滴特性と土壌侵食の実態
Investigation of raindrop characteristics and soil erosion under transmission towers using laser
measurement equipment
鉄塔敷の植生定着不良の解決を目指して
執筆者
送電鉄塔下の雨滴特性をレーザー雨滴計で計測し衝撃力を定量化した。敷地外と比べて
鉄塔下の雨滴は大粒で、雨滴衝撃力は最大で 18.5 倍、雨量は最大で 11.2 倍に達した。
また、地上 LiDAR を用いて敷地侵食の見える化を試みた。時期の異なる地表形状データ
の差分から、植生定着を妨げる小規模な侵食の検出と可視化が可能となった。
1
電力技術研究所
バイオグループ
津田 その子
背景と目的
送電鉄塔敷は、侵食防止や周辺環境との調和を目的に緑
化されるが、多くの場所で当初からあるいは徐々に植生
が失われ敷地の裸地化が進んでいる。この要因について、
2019 年度に裸地化が進行している超高圧鉄塔を中心に 50
基程の現地調査を行った結果、裸地化の進行度と土壌・環
境条件に相関がないこと、シカ食害も顕著であるがそれ以
上に塔体フランジ部等から落下する雨滴の影響が強いこと
を改めて確認した。
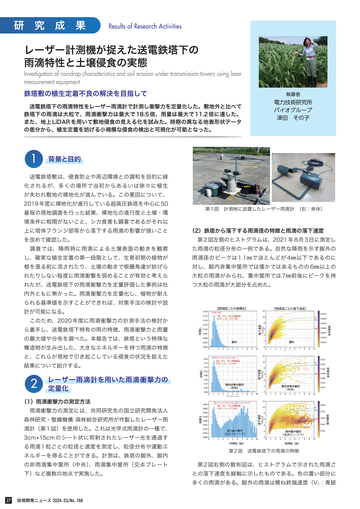
第 1 図 計測地に設置したレーザー雨滴計 (右:単体)
(2)鉄塔から落下する雨滴径の特徴と雨滴の落下速度
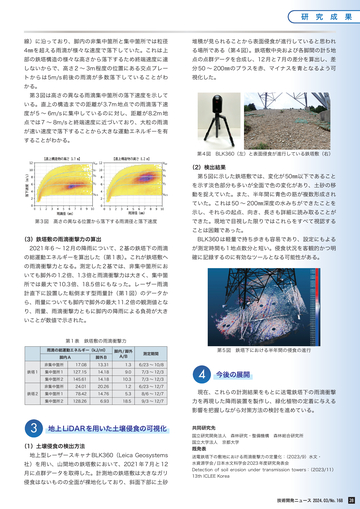
第 2 図左側のヒストグラムは、2021 年 8 月 3 日に測定し
調査では、降雨時に雨滴による土壌表面の動きを観察
た雨滴の粒径分布の一例である。自然な降雨を示す脚外の
し、確実な植生定着の第一段階として、生育初期の植物が
雨滴径のピークは 1.1㎜でほとんどが 4㎜以下であるのに
根を張る前に流されたり、土壌の動きで根圏発達が妨げら
対し、脚内非集中箇所では僅かではあるものの 6㎜以上の
れたりしない程度に雨滴衝撃を弱めることが有効と考えら
大粒の雨滴がみられ、集中箇所では 7㎜前後にピークを持
れたが、送電鉄塔下の雨滴衝撃力を定量評価した事例は社
つ大粒の雨滴が大部分を占めた。
内外ともに無かった。雨滴衝撃力を定量化し、植物が耐え
られる基準値を示すことができれば、対策手法の検討や設
計が可能になる。
このため、2020 年度に雨滴衝撃力の計測手法の検討か
ら着手し、送電鉄塔下特有の雨の特徴、雨滴衝撃力と雨量
の最大値や分布を調べた。本報告では、鉄塔という特殊な
構造物が生み出した、大きなエネルギーを持つ雨滴の特徴
と、これらが現地で引き起こしている侵食の状況を捉えた
結果について紹介する。
2
レーザー雨滴計を用いた雨滴衝撃力の
定量化
(1)雨滴衝撃力の測定方法
雨滴衝撃力の測定には、共同研究先の国立研究開発法人
森林研究・整備機構 森林総合研究所が作製したレーザー雨
滴計(第 1 図)を使用した。これは光学式雨滴計の一種で、
3cm×15cm のシート状に照射されたレーザー光を通過す
る雨滴 1 粒ごとの粒径と速度を測定し、粒径分布や運動エ
ネルギーを得ることができる。計測は、鉄塔の脚外、脚内
第 2 図 送電鉄塔下の雨滴の特徴
の非雨滴集中箇所(中央)、雨滴集中箇所(交点プレート
第 2 図右側の散布図は、ヒストグラムで示された雨滴ご
下)など複数の地点で実施した。
との落下速度を縦軸に示したものである。色の濃い部分に
多くの雨滴がある。脚外の雨滴は概ね終端速度(VT:青破
27
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 29
-
研 究 成 果
線)に沿っており、脚内の非集中箇所と集中箇所では粒径
堆積が見られることから表面侵食が進行していると思われ
4㎜を超える雨滴が様々な速度で落下していた。これは上
る場所である(第 4 図)。鉄塔敷中央および各脚間の計 5 地
部の鉄塔構造の様々な高さから落下するため終端速度に達
点の点群データを合成し、12 月と 7 月の差分を算出し、差
しないからで、高さ 2 ~ 3m 程度の位置にある交点プレー
分 50 ~ 200㎜のプラスを赤、マイナスを青となるよう可
トからは 5m/s 前後の雨滴が多数落下していることがわ
視化した。
かる。
第 3 図は高さの異なる雨滴集中箇所の落下速度を示して
いる。直上の構造までの距離が 3.7m 地点での雨滴落下速
度が 5 ~ 6m/s に集中しているのに対し、距離が 8.2m 地
点では 7 ~ 8m/s と終端速度に近づいており、大粒の雨滴
が速い速度で落下することから大きな運動エネルギーを有
することがわかる。
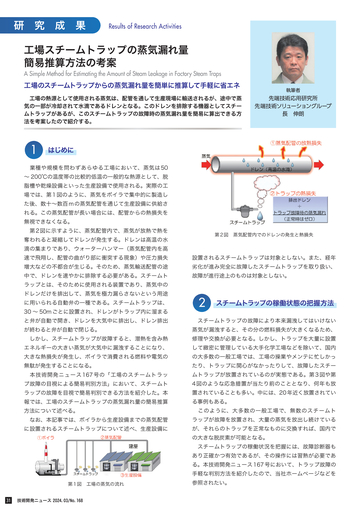
第 4 図 BLK360(左)と表面侵食が進行している鉄塔敷(右)
(2)検出結果
第 5 図に示した鉄塔敷では、変化が 50㎜以下であること
を示す淡色部分も多いが全面で色の変化があり、土砂の移
動を捉えていた。また、半年間に青色の筋が複数形成され
ていた。これは 50 ~ 200㎜深度の水みちができたことを
示し、それらの起点、向き、長さも詳細に読み取ることが
第 3 図 高さの異なる位置から落下する雨滴径と落下速度
できた。現地で目視した限りではこれらをすべて視認する
ことは困難であった。
(3)鉄塔敷の雨滴衝撃力の算出
BLK360 は軽量で持ち歩きも容易であり、設定にもよる
2021 年 6 ~ 12 月の降雨について、2 基の鉄塔下の雨滴
が測定時間も 1 地点数分と短い。侵食状況を客観的かつ明
の総運動エネルギーを算出した(第 1 表)。これが鉄塔敷へ
確に記録するのに有効なツールとなる可能性がある。
の雨滴衝撃力となる。測定した 2 基では、非集中箇所にお
いても脚外の 1.2 倍、1.3 倍と雨滴衝撃力は大きく、集中箇
所では最大で 10.3 倍、18.5 倍にもなった。レーザー雨滴
計直下に設置した転倒ます型雨量計(第 1 図)のデータか
ら、雨量についても脚内で脚外の最大 11.2 倍の観測値とな
り、雨量、雨滴衝撃力ともに脚内の降雨による負荷が大き
いことが数値で示された。
第 1 表 鉄塔敷の雨滴衝撃力
雨滴の総運動エネルギー(kJ/㎡)
脚内 A
鉄塔 1
鉄塔 2
脚外 B
脚内 / 脚外
A/B
第 5 図 鉄塔下における半年間の侵食の進行
測定期間
非集中箇所
17.08
13.31
1.3
6/23 ~ 10/8
集中箇所 1
127.15
14.18
9.0
7/3 ~ 12/3
集中箇所 2
145.61
14.18
10.3
7/3 ~ 12/3
非集中箇所
24.01
20.26
1.2
6/23 ~ 12/7
集中箇所 1
78.42
14.76
5.3
8/6 ~ 12/7
集中箇所 2
128.26
6.93
18.5
9/3 ~ 12/7
4
今後の展開
現在、これらの計測結果をもとに送電鉄塔下の雨滴衝撃
力を再現した降雨装置を製作し、緑化植物の定着に与える
影響を把握しながら対策方法の検討を進めている。
3
地上 LiDARを用いた土壌侵食の可視化
(1)土壌侵食の検出方法
地上型レーザースキャナ BLK360(Leica Geosystems
社)を用い、山間地の鉄塔敷において、2021 年 7 月と 12
月に点群データを取得した。計測地の鉄塔敷は大きなガリ
侵食はないものの全面が裸地化しており、斜面下部に土砂
共同研究先
国立研究開発法人 森林研究・整備機構 森林総合研究所
国立大学法人 京都大学
既発表
送電鉄塔下の敷地における雨滴衝撃力の定量化:(2023/9)水文・
水資源学会 / 日本水文科学会 2023 年度研究発表会
Detection of soil erosion under transmission towers:(2023/11)
13th ICLEE Korea
技術開発ニュース 2024.03/No.168
28
�
- ▲TOP

- ページ: 30
- Results of Research Activities
脱炭素対応アルミインゴット急速予熱装置の開発
Development of Decarbonized Super High Speed Aluminum Ingot Preheating Installation
高効率加熱で工場の脱炭素化に貢献
執筆者
アルミ工業製品の原材料である数 kg のアルミインゴットの溶解工程において、従来は
不可能であった極めて短い時間での予熱を実現する急速予熱装置を開発した。これによ
り、自動車関連工場等の大きな脱炭素と生産性向上が可能となる。
1
開発の背景と目的
アルミインゴットとは、アルミ製品の原材料であるアル
ミニウム地金の数 kg の延べ板のことである。アルミは軽
量で加工しやすいことから、自動車部品をはじめ様々な工
業製品に使用されており、これらの製品の多くは、溶解炉
でアルミインゴットを約 650℃まで加熱し、溶解した液状
のアルミを成型し生産されている。従来、溶解炉の熱源に
定格電圧
AC200V 三相三線式(60Hz/50Hz)
本体寸法
幅1,485mm×奥行 3,120mm×高さ2,370mm
電気容量
加熱寸法
溶解工程の電化に向けて研究開発が進められているが、品
加熱運転時 50kW /起動時 30kW
長さ700mm×奥行100mm×高さ40mm 程度
本体質量
はガスや重油を燃料とするバーナーが用いられており、溶
解工程の脱炭素化が求められていた。脱炭素化のために、
先端技術応用研究所
先端技術ソリューショングループ
長 伸朗
プロジェクト推進グループ
遠藤 紀之
第 1 表 開発品の基本仕様
加熱性能
研 究 成 果
加熱方式
2,300kg
流体制御式(電気ヒータ+熱風)
昇温時間
最短 23 秒 / 個(第 2 表参照)
処理量
最大 800kg/h(第 2 表参照)
昇温温度
最高 500℃
熱効率
最大 86%(第 2 表参照)
※お客さまニーズ(温度・処理量等)に合わせた別仕様も可能
質維持と加熱時間短縮の両立が大きな課題となっていた。
そこで、アルミインゴットの溶解工程において、従来は
不可能であった極めて短い時間で予熱できる急速予熱装置
を、株式会社日本高熱工業社および株式会社豊電子工業と
共同で開発した。
2
開発品の仕様
第 2 図 開発品の内部イメージ
開発品の外観および基本仕様を、第 1 図と第 1 表に示
す。開発品内部には、熱風吹出ノズルと電気ヒータが設置
されている(第 2 図)
。観覧車状に配置した収納容器に複数
のアルミインゴットを同時に収納して、アルミインゴット
3
開発品の特長
開発品の加熱性能は第 2 表のとおりであり、開発品の特
が加熱される。
長は以下のとおりである。
① 短時間かつ均一の加温を実現
数百℃の熱風を、装置内で高速かつ整流化して循環させ
ることで、従来は両立が難しかった急速加熱とインゴット
全体の均一な加熱を可能とした。5kg のインゴット 1 個を、
最短 23 秒で加熱することが可能である。また、電気ヒー
タによる精密な制御により、装置内に温度変動があった場
合でも、瞬時に温度を回復することが可能である。
② 高い熱効率で脱炭素に貢献
開発品の熱効率(対象物への入熱量 ÷ 消費電力量)は、
バーナー式の 20 ~ 50%を大幅に上回り、最大 86% を達
第 1 図 開発品の外観
成した。
③ 多連装式収納による高い処理能力
観覧車状に配置した収納容器に複数のアルミインゴット
29
技術開発ニュース 2024.03/No.168
�
- ▲TOP

- ページ: 31
-
研 究 成 果
を同時に収納することで、最大で 800kg/h の処理が可能と
なった。また、アルミインゴットの形状にばらつきがあっ
①従来…バーナーのみで溶解
ても、加熱が可能である。
④ 高い安全性
当社独自技術である「流体制御式」により、アルミ溶解
温度まで急速予熱しても、インゴットが所定の加熱温度を
保持して過昇温することがないため、インゴットが溶解す
ることがなく安全である。
4
活用イメージ
第 3 図のとおり、従来は、溶解まで一括してバーナーで
行っていたものを、開発品でアルミインゴットを常温から
②開発品…アルミインゴットを常温から 200~500℃まで予熱した
後、バーナー式溶解炉で溶解
200~500℃まで予熱した後、バーナー式溶解炉で溶解さ
せるものである。
5
効果
開発品は、バーナー式に比べ CO2 排出量を 36% 削減
できる(第 4 図)。また、エネルギー消費量を 28% 削減で
きる(第 5 図)。これらの効果試算は、自動車工場のアル
第 3 図 開発品の活用イメージ
ミ溶解工程を想定し、アルミインゴット昇温温度:20℃
→ 400℃、アルミ処理量 400kg/h、年間運転時間:6,200
時間(平日のみ 24h/ 日)、開発品の熱効率:85%、ガス
バーナー式予熱装置の熱効率:25%、電気の CO2 排出係
数:0.377kg-CO2/kWh 、ガスの CO2 排出係数:2.23kg-
CO2/Nm3、 電 気 の 発 熱 量 8,640kJ/kWh ガ ス 発 熱 量:
45.0MJ/Nm3、電気代:25 円 /kWh、ガス単価:110 円 /
N㎥として計算した。
このように、本開発品は、世界トップクラスの熱効率の
達成により、大きな脱炭素が可能とした。
6
第 4 図 CO2 排出量のバーナー式との比較
おわりに
開発品は、中部電力ミライズ株式会社・株式会社日本高
熱工業社・株式会社豊電子工業から、2023 年 11 月に「HD
サーモ IG」の商品名で発売された。今後は、自動車関連工
場等に普及を図ることで、工場の脱炭素と生産性向上に貢
献したい。
第 2 表 開発品の加熱性能
アルミインゴット
温度
インゴット 1 個あたり
の昇温時間
熱効率
処理量
20℃→ 200℃
23 秒
86%
800kg/h
20℃→ 300℃
25 秒
85%
720kg/h
20℃→ 400℃
40 秒
84%
450kg/h
20℃→ 500℃
66 秒
65%
273kg/h
第 5 図 エネルギー消費量のバーナー式との比較
※熱風温度 600℃で 5kg のアルミインゴットを加熱した場合
技術開発ニュース 2024.03/No.168
30
�
- ▲TOP
- ページ: 32
-
研 究 成 果
Results of Research Activities
工場スチームトラップの蒸気漏れ量
簡易推算方法の考案
A Simple Method for Estimating the Amount of Steam Leakage in Factory Steam Traps
工場のスチームトラップからの蒸気漏れ量を簡単に推算して手軽に省エネ
工場の熱源として使用される蒸気は、配管を通して生産現場に輸送されるが、途中で蒸
気の一部が冷却されて水滴であるドレンとなる。このドレンを排除する機器としてスチー
ムトラップがあるが、このスチームトラップの故障時の蒸気漏れ量を簡易に算出できる方
法を考案したので紹介する。
1
執筆者
先端技術応用研究所
先端技術ソリューショングループ
長 伸朗
はじめに
業種や規模を問わずあらゆる工場において、蒸気は 50
~ 200℃の温度帯の比較的低温の一般的な熱源として、脱
脂槽や乾燥設備といった生産設備で使用される。実際の工
場では、第 1 図のように、蒸気をボイラで集中的に製造し
た後、数十~数百 m の蒸気配管を通じて生産設備に供給さ
れる。この蒸気配管が長い場合には、配管からの熱損失を
無視できなくなる。
第 2 図に示すように、蒸気配管内で、蒸気が放熱で熱を
第 2 図 蒸気配管内でのドレンの発生と熱損失
奪われると凝縮してドレンが発生する。ドレンは高温の水
滴の集まりであり、ウォーターハンマー(蒸気配管内を高
速で飛翔し、配管の曲がり部に衝突する現象)や圧力損失
設置されるスチームトラップは対象としない。また、経年
増大などの不都合が生じる。そのため、蒸気輸送配管の途
劣化が進み完全に故障したスチームトラップを取り扱い、
中で、ドレンを速やかに排除する必要がある。スチームト
故障が進行途上のものは対象としない。
ラップとは、そのために使用される装置であり、蒸気中の
ドレンだけを排出して、蒸気を極力漏らさないという用途
に用いられる自動弁の一種である。スチームトラップは、
30 ~ 50m ごとに設置され、ドレンがトラップ内に溜まる
2
スチームトラップの稼働状態の把握方法
と弁が自動で開き、ドレンを大気中に排出し、ドレン排出
スチームトラップの故障により本来漏洩してはいけない
が終わると弁が自動で閉じる。
蒸気が漏洩すると、その分の燃料損失が大きくなるため、
しかし、スチームトラップが故障すると、潜熱を含み熱
修理や交換が必要となる。しかし、トラップを大量に設置
エネルギーの大きい蒸気が大気中に漏洩することになり、
して緻密に管理している大手化学工場などを除いて、国内
大きな熱損失が発生し、ボイラで消費される燃料や電気の
の大多数の一般工場では、工場の操業やメンテに忙しかっ
無駄が発生することになる。
たり、トラップに関心がなかったりして、故障したスチー
本技術開発ニュース 167 号の「工場のスチームトラッ
ムトラップが放置されているのが実態である。第 3 図や第
プ故障の目視による簡易判別方法」において、スチームト
4 図のような応急措置が当たり前のこととなり、何年も放
ラップの故障を目視で簡易判別できる方法を紹介した。本
置されていることも多い。中には、20 年近く放置されてい
報では、工場のスチームトラップの蒸気漏れ量の簡易推算
る事例もある。
方法について述べる。
このように、大多数の一般工場で、無数のスチームト
なお、本記事では、ボイラから生産設備までの蒸気配管
ラップが故障を放置され、大量の蒸気を放出し続けている
に設置されるスチームトラップについて述べ、生産設備に
が、それらのトラップを正常なものに交換すれば、国内で
の大きな脱炭素が可能となる。
スチームトラップの稼働状況を把握には、故障診断器も
あり正確かつ有効であるが、その操作には習熟が必要であ
る。本技術開発ニュース 167 号において、トラップ故障の
手軽な判別方法を紹介したので、当社ホームページなどを
第 1 図 工場の蒸気の流れ
31
技術開発ニュース 2024.03/No.168
参照されたい。
�
- ▲TOP
- ページ: 33
- 3
スチームトラップからの蒸気漏れ量の計算
スチームトラップの脱炭素やコスト削減の試算方法を紹
介する。精密な測定値などに対して誤差はあるが、工場の
操業やメンテに忙しいご担当者でも手軽に試算でき、実用
上十分である。
(1)スチームトラップの稼働状況のパラメータ
まず、スチームトラップの稼働状況の指標となるパラメータ
として、開放の時間率T を定義する。この時間率T は、実際
のスチームトラップの稼働状態を観察することによって決める。
第 3 図 スチームトラップの故障 ( 弁故障により常時蒸気が漏洩)
種々の状況での時間率 T の値を第 2 表に示す。実際のス
チームトラップ蒸気を常時排出している場合は、弁の故障
で弁が常時開放されているため、時間率 T は 1 とする(第
3 図)。また同じ故障でも、蒸気もドレンも吹かない場合
は、 弁 が 詰 ま っ て お り、 時 間 率 T は 0 で あ る。 一 方、 ト
ラップが正常で断続的にドレン排出されている場合は、ト
ラップは一般に 1 時間に 5 分程度弁が開放され、蒸気も混
入して排出されるため、時間率 T は 0.1 とする。
ディスク式以外のトラップでは、正常稼働と完全な故
障(完全な詰まりまたは常時蒸気漏れ)の中間的な状況
第 4 図 バイパス弁の開放(トラップ故障で仕方なくバイパス弁開放)
第 2 表 スチームトラップの弁開放の時間率 T
(断続的な蒸気漏れ)はほとんど発生しないため、時間率
対象・種類
T は 0.1 と 1 のいずかの値をとる。しかし、ディスク式の
トラップでは、弁の摩耗が徐々に進行するため、時間率T
は、時間が経過すると 0.1 から 1 の値の中で徐々に大きく
なる。このため、工場での目視結果を基に、時間率を設定
する必要があるが、一律に 0.5 と設定してもよい。
トラップ故障でドレン排出できないため、ウォーターハ
蒸気トラップ
研 究 成 果
ンマー等の防止のため仕方なく、トラップに併設されたバ
フロート式
バケット式
ベローズ式
バイメタル式
ディスク式
イパス弁を開けることでドレン排出させる場合もある ( 第
4 図 )。この場合の時間率 T は 1 とする。
(2)スチームトラップからの蒸気漏れ量の算出方法
バイパス弁の開放
直径が数 mmの小孔からの蒸気漏れ量の計算式に前節の時
観察結果
判定
断続的なドレン排出
蒸気もドレンも吹か
ない
蒸気の常時排出
断続的なドレン排出
頻繁なドレン排出
(カチャカチャ音)
蒸気もドレンも排出
されない
蒸気の常時排出
蒸気もドレンも排出
されない
蒸気の常時排出
正常
故障
( 詰まり )
故障
正常
弁の摩耗
時間
率T
0.1
0
1
0.1
0.5
故障
( 詰まり )
故障
1.0
バルブ閉
0
バルブ開
1.0
0
間率を乗じることで、トラップからの蒸気漏れ量は計算できる。
H :年間の稼働時間= 8,000h/ 年
T :弁開放の時間率(第 2 表)
β :蒸気単価= 5 円 /kg
P :蒸気の絶対圧 [MPa]
y :燃料の単価= 100 円 /Nm3
d :小孔の直径 [mm]…2 ~ 4.5mm
d はスチームトラップの型式によって決めるが、型式が不明の場
合は、一律 3mmを用いる。また、スチームトラップの弁が詰
まって、バイパス弁が開放されている場合は5mmを使用する。
(3)計算例
①蒸気漏れ量 W m
T :弁開放の時間率= 1(第 2 表の蒸気の常時排出)
d :小孔の直径= 3mm
P :蒸気の絶対圧= 0.8MPa
②年間の燃料損失金額 A Y
K :故障しているスチームトラップの数= 5
③年間の CO2 排出量 C Y
K :燃料の CO2 排出係数= 2.23kg-CO2/Nm3
4
おわりに
故障したスチームトラップを放置し、蒸気を何年も漏洩
したままにすると、ボイラの燃料消費の無駄が多大であ
り、脱炭素の面でトラップ交換の意義は大きい。今回の推
算方法は、これまでスチームトラップの故障を見過ごして
きた工場のお客さまに、脱炭素の効果などを簡易的に推算
できる方法としてご活用いただきたい。
技術開発ニュース 2024.03/No.168
32
�
- ▲TOP
- ページ: 34
-
研 究 成 果
Results of Research Activities
3D カメラを用いたアルミ溶解炉操業の
省エネ支援システムの開発
Development of energy saving support operation system for aluminum melting furnace with 3D
camera
材料重量の算定によりエネルギーロスを減らし、省エネに貢献
ダイカスト工場において多量のエネルギーを消費するガス燃焼式の金属溶解炉では、炉
内材料の溶け具合を適切に把握できずに空焚きとなり、エネルギーロスが発生していた。
これまでにもこのロスを低減する省エネ支援システムを開発したが、今回、画像解析によ
り炉内の未溶解重量の算定精度を向上させる機能改良を行い、更なる省エネルギーを実現
したので報告する。
1
2
背景と目的
執筆者
先端技術応用研究所
先端技術ソリューショングループ
棚橋 尚貴
材料重量算定システムの開発概要
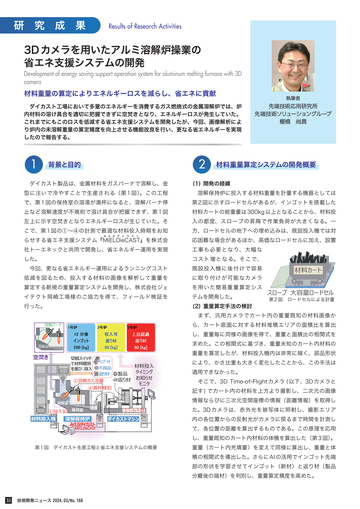
ダイカスト製品は、金属材料をガスバーナで溶解し、金
(1) 開発の経緯
型に注いで冷やすことで生産される(第 1 図)。この工程
溶解保持炉に投入する材料重量を計量する機器としては
で、第 1 図の保持室の溶湯が満杯になると、 溶解バーナ停
第 2 図に示すロードセルがあるが、インゴットを搭載した
止など溶解速度が不規則で溶け具合が把握できず、 第 1 図
材料カートの総重量は 300kg 以上となることから、材料投
左上に示す空焚きとなりエネルギーロスが生じていた。そ
入の都度、スロープの昇降で作業負荷が大きくなる。一
こで、 第 1 図の①~④の計測で最適な材料投入時期をお知
方、ロードセルの地下への埋め込みは、既設投入機では対
らせする省エネ支援システム『MiELDieCAST』を株式会
応困難な場合があるほか、高価なロードセルに加え、設置
社トーエネックと共同で開発し、 省エネルギー運用を実現
工事も必要となり、大幅な
した。
コ ス ト 増 と な る。 そ こ で、
今回、更なる省エネルギー運用によるランニングコスト
既設投入機に後付けで容易
低減を図るため、投入する材料の画像を解析して重量を
に取り付けが可能なカメラ
算定する新規の重量算定システムを開発し、株式会社ジェ
を用いた簡易重量算定シス
イテクト岡崎工場様のご協力を得て、フィールド検証を
テムを開発した。
行った。
(2) 重量算定手法の検討
み え る ダ イ カ ス ト
第 2 図 ロードセルによる計量
まず、汎用カメラでカート内の重量既知の材料画像か
ら、カート底面に対する材料堆積エリアの面積比を算出
し、重量毎に同様の画像を得て、重量と面積比の相関式を
求めた。この相関式に基づき、重量未知のカート内材料の
空焚き
切替スイッチ
で材料種別
を選び、投入
重量を算定したが、材料投入機内は非常に暗く、部品形状
インゴッ
インゴット
不良品
返り材
②溶解ガス流量
④満杯検知
により、かさ比重も大きく変化したことから、この手法は
適用できなかった。
そこで、3D Time-of-Flight カメラ ( 以下、3D カメラと
記す ) でカート内の材料を上方より撮影し、二次元の画像
情報ならびに三次元空間座標の情報(距離情報)を取得し
溶解室
①投入釦 保持室
材料投入機
材料投入
タイミング
製品
返り材 お知らせ
モニタ
溶湯
溶解保持炉
みえるダイカスト
③ショット数
ダイカストマシン
ダイカ
MiELDieCAST
た。3D カメラは、赤外光を被写体に照射し、撮影エリア
内の各位置からの反射光がカメラに戻るまで時間を計測し
て、各位置の距離を算出するものである。この原理を応用
し、重量既知のカート内材料の体積を算出した(第 3 図)。
第 1 図 ダイカスト生産工程と省エネ支援システムの概要
重量(カート内充填量)を変えて同様に算出し、重量と体
積の相関式を導出した。さらに AI の活用でインゴット先端
部の形状を学習させてインゴット(新材)と返り材(製品
分離後の端材)を判別し、重量算定精度を高めた。
33
技術開発ニュース 2024.03/No.168
�
- ▲TOP

- ページ: 35
-
研 究 成 果
この結果、相対誤差の平均値が 8.5%、総重量に対する
(1) 重量算定システムの自動化
し、材種毎に固定値を設定する方式より精度が向上した。
400
20%
15%
300
15%
200
10%
200
10%
100
5%
100
5%
0
0%
0
0%
20%
300
の昇降の際にカメラが接触しない位置に、固定バーを製作
して 3D カメラを取り付けた(第 4 図)。カメラで取得可能
な二次元および三次元データの活用で、材料カートが搬入
され、扉が閉まった直後に自動で画像を取得し、重量算定
まで行えるようにした。
重量算定システムの自動化により、計量に伴う新たな作
業負荷が生じず、新規の検知センサも不要となった。
(2) 検証結果
A炉-1日目
A炉-2日目
A炉-3日目
B炉-1日目
B炉-2日目
B炉-3日目
材料投入機内の材料カート搬入部より上方、かつカート
kg
400
A炉-1日目
A炉-2日目
A炉-3日目
B炉-1日目
B炉-2日目
B炉-3日目
重量算定システムの検証
kg
3
誤差率の平均値が 3.0% となり、従来の手動で材種を選択
(a) 絶対誤差 (b) 総重量に対する誤差
第 6 図 実測重量に対する算定重量の誤差
材料投入機内で取得したカート内材料の画像の例を第 5
図に示す。(a) の上図ではインゴットが 4 列で整列した状
態であるが、下図は、搬入部のストッパーにカートが当
たった衝撃で、配列が乱れた状態を示している。このよう
4
省エネ支援システムとの連携検証
な画像でもインゴットに判別できることを確認した。
重量算定システムで得られた材料投入時の重量をリア
一方、(b) 返り材の上図と下図は異なる製品から発生し
ルタイムに省エネ支援システム「MiELDieCAST」に転送
た端材であり、堆積時の形状が大きく異なっている。
し、溶解炉内の残重量ならびに材料の適正な投入タイミン
これらが大幅な誤差を生じさせずに算定できるか確認す
グを算出した。
るため、2 基の溶解保持炉に投入される材料重量を実測し、
この運用を 1 か月間継続し、従来システムで運用した前
第 6 図の通り、算定値との誤差を求めた。(a)は個別重量
年同月の溶解エネルギー原単位と比較した。溶解エネル
絶対誤差の合計値で、(b) は 1 日の総実測重量に対する誤
ギー原単位の低減率を第 7 図に示す。第 7 図の通り、A 炉
差重量(正負を考慮)である。
では従来比 4%、B 炉では 22% のエネルギー低減の結果が
得られ、重量算定システムと連携した省エネ支援システム
3D
が一定の効果を有することが分かった※。
※操業条件が前年同月と同一ではない為、低減率の値は参考値
PC
第 3 図 3D カメラの原理 第 4 図 カメラ設置状況
第 7 図 従来システムとの比較
5
今後の展開
本システムは、中部電力ミライズ株式会社にて販売して
いる。今後、ダイカスト工場のお客さまへの開発品の普
及、展開により、ガスの省エネルギー推進に貢献したい。
(a)インゴット (b)返り材
第 5 図 3D カメラでの取得画像例
技術開発ニュース 2024.03/No.168
34
�
- ▲TOP
- ページ: 36
-
研 究 成 果
Results of Research Activities
高熱環境下における放射測温システムの開発
Development of Radiation Temperature Measurement System under Hot environment
600℃以上の材料の温度を放射率の設定なしで高精度に計測
高熱環境下での被加熱物の測温は、品質管理の観点でとても重要である。特に 1000℃
以上の溶解金属の測温は、市販放射温度計では誤差が大きいため、熱電対を用いた手作業
で行われており、無人化が求められていた。そこで、600 ~ 1600℃の高熱環境下で高
精度の測温が可能な放射測温システムを開発した。
1
2
背景と目的
執筆者
先端技術応用研究所
先端技術ソリューショングループ
棚橋 尚貴・藤本 貴之
システムの概要
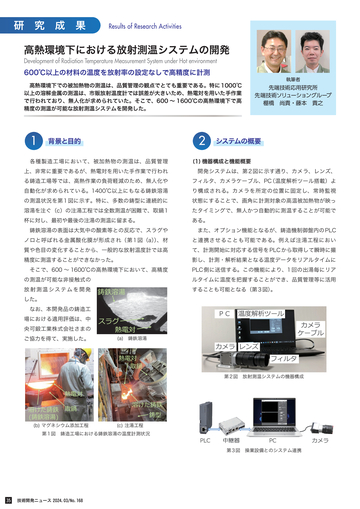
各種製造工場において、被加熱物の測温は、品質管理
(1) 機器構成と機能概要
上、非常に重要であるが、熱電対を用いた手作業で行われ
開発システムは、第 2 図に示す通り、カメラ、レンズ、
る鋳造工場等では、高熱作業の負荷軽減のため、無人化や
フィルタ、カメラケーブル、PC(温度解析ツール搭載)よ
自動化が求められている。1400℃以上にもなる鋳鉄溶湯
り構成される。カメラを所定の位置に固定し、常時監視
の測温状況を第 1 図に示す。特に、多数の鋳型に連続的に
状態にすることで、画角に計測対象の高温被加熱物が映っ
溶湯を注ぐ(c)の注湯工程では全数測温が困難で、取鍋 1
たタイミングで、無人かつ自動的に測温することが可能で
杯に対し、最初や最後の注湯の測温に留まる。
ある。
鋳鉄溶湯の表面は大気中の酸素等との反応で、スラグや
また、オプション機能となるが、鋳造機制御盤内の PLC
ノロと呼ばれる金属酸化膜が形成され(第 1 図(a))、材
と連携させることも可能である。例えば注湯工程におい
質や色目の変化することから、一般的な放射温度計では高
て、計測開始に対応する信号を PLC から取得して瞬時に撮
精度に測温することができなかった。
影し、計測・解析結果となる温度データをリアルタイムに
そこで、600 ~ 1600℃の高熱環境下において、高精度
PLC 側に送信する。この機能により、1 回の出湯毎にリア
の測温が可能な非接触式の
ルタイムに温度を把握することができ、品質管理等に活用
放射測温システムを開発
することも可能となる(第 3 図)。
した。
なお、本開発品の鋳造工
PC
場における適用評価は、中
央可鍛工業株式会社さまの
ご協力を得て、実施した。
(a) 鋳鉄溶湯
第 2 図 放射測温システムの機器構成
(
)
(b) マグネシウム添加工程 (c) 注湯工程
第 1 図 鋳造工場における鋳鉄溶湯の温度計測状況
PLC
PC
第 3 図 操業設備とのシステム連携
35
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 37
-
研 究 成 果
(2) 特長
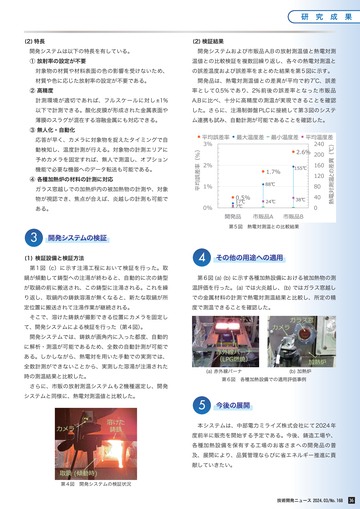
(2) 検証結果
開発システムは以下の特長を有している。
開発システムおよび市販品 A,B の放射測温値と熱電対測
① 放射率の設定が不要
温値との比較検証を複数回繰り返し、各々の熱電対測温と
対象物の材質や材料表面の色の影響を受けないため、
の誤差温度および誤差率をまとめた結果を第 5 図に示す。
材質や色に応じた放射率の設定が不要である。
開発品は、熱電対測温値との差異が平均で約 7℃、誤差
② 高精度
率として 0.5% であり、2% 前後の誤差率となった市販品
計測環境が適切であれば、フルスケールに対し ±1%
A,B に比べ、十分に高精度の測温が実現できることを確認
以下で計測できる。酸化皮膜が形成された金属表面や
した。さらに、注湯制御盤 PLC に接続して第 3 図のシステ
薄膜のスラグが混在する溶融金属にも対応できる。
ム連携も試み、自動計測が可能であることを確認した。
③ 無人化・自動化
応答が早く、カメラに対象物を捉えたタイミングで自
予めカメラを固定すれば、無人で測温し、オプション
機能で必要な機器へのデータ転送も可能である。
④ 各種加熱炉の材料の計測に対応
ガラス窓越しでの加熱炉内の被加熱物の計測や、対象
3%
240
2.6% 200
%
動検知し、温度計測が行える。対象物の計測エリアに
2%
120
1%
80
40
0.5%
物が視認でき、焦点が合えば、炎越しの計測も可能で
0%
ある。
3
160
1.7%
0
A
B
第 5 図 熱電対測温との比較結果
開発システムの検証
(1) 検証設備と検証方法
第 1 図(c)に示す注湯工程において検証を行った。取
4
その他の用途への適用
鍋が傾動して鋳型への注湯が終わると、自動的に次の鋳型
第 6 図 (a)(b) に示す各種加熱設備における被加熱物の測
が取鍋の前に搬送され、この鋳型に注湯される。これを繰
温評価を行った。(a) では火炎越し、(b) ではガラス窓越し
り返し、取鍋内の鋳鉄溶湯が無くなると、新たな取鍋が所
での金属材料の計測で熱電対測温結果と比較し、所定の精
定位置に搬送されて注湯作業が継続される。
度で測温できることを確認した。
そこで、溶けた鋳鉄が撮影できる位置にカメラを固定し
て、開発システムによる検証を行った(第 4 図)。
開発システムでは、鋳鉄が画角内に入った都度、自動的
に解析・測温が可能であるため、全数の自動計測が可能で
ある。しかしながら、熱電対を用いた手動での実測では、
全数計測ができないことから、実測した溶湯が注湯された
時の測温結果と比較した。
LPG
(a) 赤外線バーナ (b) 加熱炉
第 6 図 各種加熱設備での適用評価事例
さらに、市販の放射測温システムも 2 機種選定し、開発
システムと同様に、熱電対測温値と比較した。
5
今後の展開
本システムは、中部電力ミライズ株式会社にて 2024 年
度前半に販売を開始する予定である。今後、鋳造工場や、
各種加熱設備を保有する工場のお客さまへの開発品の普
及、展開により、品質管理ならびに省エネルギー推進に貢
(
)
献していきたい。
第 4 図 開発システムの検証状況
技術開発ニュース 2024.03/No.168
36
�
- ▲TOP
- ページ: 38
-
研 究 成 果
Results of Research Activities
工場向けワイヤレス型オイルミスト濃度・温湿度計測システム
「MieruTIME OILMIST」の開発
Development of“MieruTIME OILMIST”, a wireless oil mist concentration/temperature/humidity measurement system for factories
Visualization of the oil mist environment inside the factory and use it for countermeasures
工場内のオイルミスト環境を見える化することで対策に活用
当社は九州計測器(株)、中部電力ミライズ(株)と共同で、オイルミストや粉塵の濃
度と、温湿度の空間・時間変化を表示できるワイヤレス型オイルミスト濃度・温湿度計測
システム「MieruTIME OILMIST」を開発した。本システムにより、工場内のオイルミ
スト濃度や温湿度分布が見える化できることで、高濃度・高温度箇所の特定や環境改善対
策の立案に活用できる。
執筆者
先端技術応用研究所
先端技術ソリューショングループ
中山 浩
1
開発の背景と目的
ウド接続に対応している。計測は 1 分間隔から設定可能
で、お客さまの要望に合わせてシステムを構築することが
できる。
金属部品の切削・研磨工程を有する工場では、その工程
で発生するオイルミストや粉塵、温熱の偏りによる作業環
境の悪化が課題である。近年の作業環境改善意識の高まり
により、工場内のオイルミスト濃度、粉塵濃度、温湿度分
布等を見える化し、適切に対策することが求められている。
そこで、当社は、九州計測器(株)および中部電力ミラ
イズ(株)と共同で、濃度や温湿度を計測するワイヤレス
型の小型センサを工場内各所に配置し、無線でパソコンや
クラウドにデータを集約し映像化することで、工場内環境
を見える化できるシステム「MieruTIME OILMIST」を開
発した。
第 1 図 MieruTIME OILMIST の外観
工場内環境の空間・時間変化が確認できることで、例え
ば局所排気、空調の追加設置や給気・換気量の運用変更な
どの対策が立てやすく、工場内環境の改善が実現できる。
2
開発システムの概要
第 1 表 MieruTIME OILMIST の仕様
項目
親機
子機
150x120x50mm
44x64x25mm
重量
350g
100g
通信方式
Ethernet
Wi-Fi
(2.4GHz/5GHz)
920MHz UNISONet
920MHz UNISONet
寸法
第 1 図 に 開 発 し た「MieruTIME OILMIST」 の 機 器 外
観、第 1 表に仕様を示す。機器は親機と子機から構成され、
1 台の親機に対して、子機は 99 台まで接続可能である。親
機と子機の間は 920MHz 帯特定小電力無線を用いている。
920MHz 帯は、従来の免許不要な無線周波数 (2.4GHz 等 )
計測範囲
計測間隔
電源
温度:0 ~ 40℃
湿度:0 ~ 100%RH
ミスト濃度:0 ~ 1000㎍ /m3
1 分間隔から設定可能
AC100V
USB Type-C 接続
と比較して、工場内で繋がり易い周波数帯である。さらに
子機間でバケツリレー的に通信するマルチホップ通信機能
を採用することで、無線通信の信頼性を向上させている。
子機はミスト濃度および温湿度を計測可能なセンサ、基
盤、アンテナで構成される。ミスト濃度センサはレーザ散
乱 方 式 を 採 用 し、4 種 類 の 粒 径 範 囲(PM1.0,PM2.5,
37
3
開発システムの特長
(1)オイルミスト濃度分布を容易に見える化
従来、工場内のオイルミスト濃度を計測するには、ピエ
PM4,PM10)での濃度が出力される。各種センサの調子
ゾバランス式や赤外線を利用した光散乱式の粉塵計が使わ
が悪くなった場合には、お客さま自身で容易に交換できる
れている。これらの粉塵計は 1 点での計測であり、工場内
仕様となっている。
で濃度分布を得るには、作業者が場所を移動しながら計測
親機は子機からの情報を収集して保存する機能を有し、
する必要があり、時間と労力を要していたが、本システム
工場内の社内 LAN や PC への接続(ローカル接続)、クラ
は一旦設置すれば容易に見える化ができる。
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 39
-
研 究 成 果
(2)無線のため設置が容易
る。中部電力ミライズ(株)では、本開発品を活用し、工
親機と子機の間の通信には障害物に強いマルチホップ対応
場内環境の問題箇所の特定、改善策の検討および改善効果
920MHz 無線を利用している。ワイヤレスで構築できるため、
の確認までを、一括してサポートするエネルギーソリュー
設置に関する制約が少なく、大きな工事不要で利用できる。
ションサービスも行っている。
壁、柱、機器等の障害物がある状況で、200m×200m
工場作業員の作業環境改善、生産性向上の一助のツール
の範囲で通信できることを確認しており、障害物が少なけ
として、本技術が活用されることが期待される。
れば、さらに広い範囲での計測が可能である。
(3)クラウド接続とローカル接続対応
得られたデータは親機に保存され、クラウドに上げるこ
ともできる。その場合、データはクラウドにインストール
920MHz
UNISONet
された専用の見える化ソフトウェアにより現状確認や分析
ができる。(第 2 図 (a))
一方、親機内にシングルボードコンピュータを組み込
(a) クラウド接続
み、データ保存と見える化ソフトウェアをインストールす
るオンプレミス方式とすることができる。この場合、工場
内の社内 LAN を介して社内 PC のみでデータ共有させるこ
とができる。(第 2 図 (b))
さらに、親機に接続した USB メモリに csv データを保存
Web
Web
920MHz
UNISONet
し、お客さま自身でデータ解析するシンプルな構成にする
こともできる。
(第 2 図 (c))
。 このように、「遠隔監視の
実施」や「クラウドを介さない見える化」等、お客さまの
(b) ローカル接続(オンプレミス方式)
要望に応じて、システム構築できる。
(4)お客さまのニーズに合わせてカスタマイズ
ミスト濃度センサ、温湿度センサだけでなく、CO2 濃度
センサも設置可能であり、お客さまの要望に合わせてセン
920MHz
UNISONet
サを選択できる。
4
適用事例
(c) ローカル接続(USB メモリ保存)
第 2 図 様々な接続方式
親機 1 台、子機 10 台からなる「MieruTIME OILMIST」
システムを某切削加工工場に適用した際の PM1.0 のミスト
濃度分布を第 3 図に示す。
図よりオイルミスト濃度の高い領域(赤色)が、工場の
中で偏っていることが可視化できている。専用ソフトウェ
アでは、ミスト濃度、温度、湿度をボタンで切り替えする
機能や時間、カラーバーの領域を変更する機能を持ち、各
種データの時間変化をアニメーション再生させることがで
(a) 換気量が少ない状態(換気回数 0.5 回)
きる。このケースでは、時間経過とともに換気量を増加さ
せた結果、工場内のミスト濃度は均一化する傾向が見られ
た。このように、工場内のミスト分布と換気量の関係が明
確になることで、給排気量の変更や局所排気装置の設置な
ど、工場内環境改善の対策が立てやすくなる。
5
まとめ
ワイヤレス型オイルミスト濃度・温湿度計測システム
(b) 換気量が多い状態(換気回数 1.5 回)
第 3 図 オイルミスト濃度分布
「MieruTIME OILMIST」は九州計測器(株)および中部電
力ミライズ(株)から 2023 年 7 月より発売を開始してい
技術開発ニュース 2024.03/No.168
38
�
- ▲TOP
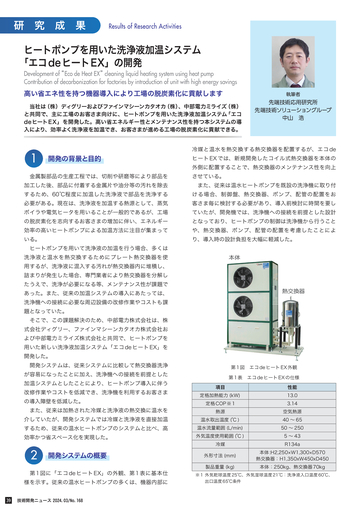
- ページ: 40
-
研 究 成 果
Results of Research Activities
ヒートポンプを用いた洗浄液加温システム
「エコdeヒートEX」の開発
Development of“Eco de Heat EX”cleaning liquid heating system using heat pump
Contribution of decarbonization for factories by introduction of unit with high energy savings
高い省エネ性を持つ機器導入により工場の脱炭素化に貢献します
執筆者
当社は(株)ディグリーおよびファインマシーンカタオカ(株)、中部電力ミライズ(株)
と共同で、主に工場のお客さま向けに、ヒートポンプを用いた洗浄液加温システム「エコ
deヒートEX」を開発した。高い省エネルギー性とメンテナンス性を持つ本システムの導
入により、効率よく洗浄液を加温でき、お客さまが進める工場の脱炭素化に貢献できる。
先端技術応用研究所
先端技術ソリューショングループ
中山 浩
1
開発の背景と目的
冷媒と温水を熱交換する熱交換器を配置するが、エコ de
ヒート EX では、新規開発したコイル式熱交換器を本体の
外側に配置することで、熱交換器のメンテナンス性を向上
金属製部品の生産工程では、切削や研磨等により部品を
させている。
加工した後、部品に付着する金属片や油分等の汚れを除去
また、従来は温水ヒートポンプを既設の洗浄機に取り付
するため、60℃程度に加温した洗浄液で部品を洗浄する
ける場合、制御盤、熱交換器、ポンプ、配管の配置をお
必要がある。現在は、洗浄液を加温する熱源として、蒸気
客さま毎に検討する必要があり、導入前検討に時間を要し
ボイラや電気ヒータを用いることが一般的であるが、工場
ていたが、開発機では、洗浄機への接続を前提とした設計
の脱炭素化を志向するお客さまの増加に伴い、エネルギー
となっており、ヒートポンプの制御は洗浄機から行うこと
効率の高いヒートポンプによる加温方法に注目が集まって
や、熱交換器、ポンプ、配管の配置を考慮したことによ
いる。
り、導入時の設計負担を大幅に軽減した。
ヒートポンプを用いて洗浄液の加温を行う場合、多くは
洗浄液と温水を熱交換するためにプレート熱交換器を使
用するが、洗浄液に混入する汚れが熱交換器内に堆積し、
詰まりが発生した場合、専門業者により熱交換器を分解し
たうえで、洗浄が必要になる等、メンテナンス性が課題で
あった。また、従来の加温システムの導入にあたっては、
洗浄機への接続に必要な周辺設備の改修作業やコストも課
題となっていた。
そこで、この課題解決のため、中部電力株式会社は、株
式会社ディグリー、ファインマシーンカタオカ株式会社お
よび中部電力ミライズ株式会社と共同で、ヒートポンプを
用いた新しい洗浄液加温システム「エコ de ヒート EX」を
開発した。
開発システムは、従来システムに比較して熱交換器洗浄
第 1 図 エコ de ヒート EX 外観
が容易になったことに加え、洗浄機への接続を前提とした
加温システムとしたことにより、ヒートポンプ導入に伴う
改修作業やコストを低減でき、洗浄機を利用するお客さま
の導入障壁を低減した。
また、従来は加熱された冷媒と洗浄液の熱交換に温水を
項目
性能
定格加熱能力 (kW)
13.0
定格 COP ※ 1
3.14
熱源
空気熱源
介していたが、開発システムでは冷媒と洗浄液を直接加温
温水取出温度 (℃ )
40 ~ 65
するため、従来の温水ヒートポンプのシステムと比べ、高
温水流量範囲 (L/min)
50 ~ 250
外気温度使用範囲 (℃ )
5 ~ 43
効率かつ省スペース化を実現した。
2
開発システムの概要
第 1 図に「エコ de ヒート EX」の外観、第 1 表に基本仕
様を示す。従来の温水ヒートポンプの多くは、機器内部に
39
第 1 表 エコ de ヒート EX の仕様
技術開発ニュース 2024.03/No.168
冷媒
R134a
外形寸法 (mm)
本体 :H2,250×W1,300×D570
熱交換器:H1,350xW450xD450
製品重量 (kg)
本体:250kg、熱交換器 70kg
※ 1 外気乾球温度 25℃、外気湿球温度 21℃:洗浄液入口温度 60℃、
出口温度 65℃条件
�
- ▲TOP
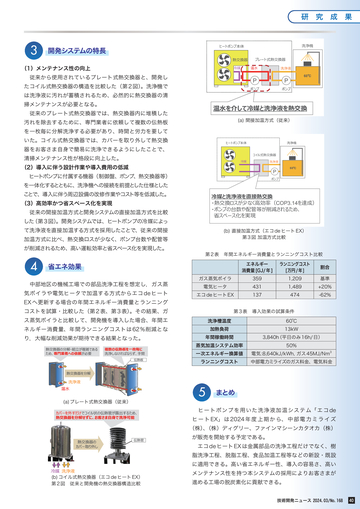
- ページ: 41
-
研 究 成 果
3
洗浄機
ヒートポンプ本体
開発システムの特長
熱交換器
(1)メンテナンス性の向上
冷媒
従来から使用されているプレート式熱交換器と、開発し
たコイル式熱交換器の構造を比較した(第 2 図)。洗浄機で
は洗浄液に汚れが蓄積されるため、必然的に熱交換器の清
掃メンテナンスが必要となる。
プレート式熱交換器
温水
洗浄液
P
P
ポンプ
ポンプ
60℃
温水を介して冷媒と洗浄液を熱交換
従来のプレート式熱交換器では、熱交換器内に堆積した
(a) 間接加温方式(従来)
汚れを除去するために、専門業者に依頼して複数の伝熱板
を一枚毎に分解洗浄する必要があり、時間と労力を要して
いた。コイル式熱交換器では、カバーを取り外して熱交換
ヒートポンプ本体
器をお客さま自身で簡易に洗浄できるようにしたことで、
洗浄機
コイル式熱交換器
清掃メンテナンス性が格段に向上した。
冷媒
(2)導入に伴う設計作業や導入費用の低減
洗浄液
ヒートポンプに付属する機器(制御盤、ポンプ、熱交換器等)
ポンプ
を一体化するとともに、洗浄機への接続を前提とした仕様とした
ことで、導入に伴う周辺設備の改修作業やコスト等を低減した。
冷媒と洗浄液を直接熱交換
・熱交換ロスが少なく高効率(COP3.14を達成)
・ポンプの台数や配管等が削減されるため、
省スペース化を実現
(3)高効率かつ省スペース化を実現
従来の間接加温方式と開発システムの直接加温方式を比較
した(第 3 図)
。開発システムでは、ヒートポンプの冷媒によっ
て洗浄液を直接加温する方式を採用したことで、従来の間接
(b) 直接加温方式(エコ de ヒート EX)
第 3 図 加温方式比較
加温方式に比べ、熱交換ロスが少なく、ポンプ台数や配管等
が削減されるため、高い運転効率と省スペース化を実現した。
4
第 2 表 年間エネルギー消費量とランニングコスト比較
エネルギー
消費量[GJ/ 年 ]
ランニングコスト
[万円/年]
割合
ガス蒸気ボイラ
359
1,209
基準
電気ヒータ
431
1,489
+20%
エコ de ヒート EX
137
474
-62%
省エネ効果
中部地区の機械工場での部品洗浄工程を想定し,ガス蒸
気ボイラや電気ヒータで加温する方式からエコ de ヒート
EX へ更新する場合の年間エネルギー消費量とランニング
コストを試算・比較した(第 2 表、第 3 表)。その結果、ガ
第 3 表 導入効果の試算条件
ス蒸気ボイラと比較して、開発機を導入した場合、年間エ
ネルギー消費量、年間ランニングコストは 62%削減とな
り,大幅な削減効果が期待できる結果となった。
(a) プレート式熱交換器(従来)
60℃
P
洗浄槽温度
60℃
加熱負荷
13kW
年間稼働時間
3,840h(平日のみ 16h/ 日)
一次エネルギー換算値
電気 :8,640kJ/kWh, ガス 45MJ/Nm3
ランニングコスト
中部電力ミライズのガス料金、電気料金
蒸気加温システム効率
5
50%
まとめ
ヒートポンプを用いた洗浄液加温システム「エコ de
ヒ ー ト EX」 は 2024 年 度 上 期 か ら、 中 部 電 力 ミ ラ イ ズ
(株)、(株)ディグリー、ファインマシーンカタオカ(株)
が販売を開始する予定である。
エコ de ヒート EX は金属部品の洗浄工程だけでなく、樹
脂洗浄工程、脱脂工程、食品加温工程等などの新設・既設
に適用できる。高い省エネルギー性、導入の容易さ、高い
(b) コイル式熱交換器(エコ de ヒート EX)
第 2 図 従来と開発機の熱交換器構造比較
メンテナンス性を持つ本システムの採用によりお客さまが
進める工場の脱炭素化に貢献できる。
技術開発ニュース 2024.03/No.168
40
�
- ▲TOP
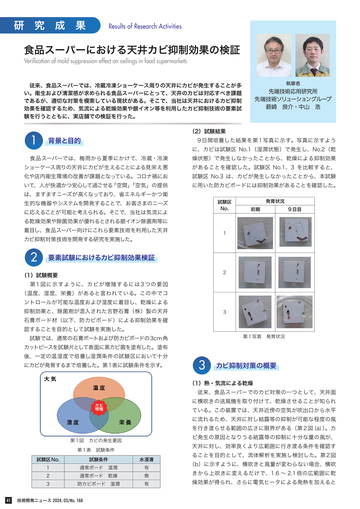
- ページ: 42
-
研 究 成 果
Results of Research Activities
食品スーパーにおける天井カビ抑制効果の検証
Verification of mold suppression effect on ceilings in food supermarkets
執筆者
従来、食品スーパーでは、冷蔵冷凍ショーケース周りの天井にカビが発生することが多
い。衛生および清潔感が求められる食品スーパーにとって、天井のカビは対応すべき課題
であるが、適切な対策を模索している現状がある。そこで、当社は天井におけるカビ抑制
効果を確認するため、気流による乾燥効果や銀イオン等を利用したカビ抑制技術の要素試
験を行うとともに、実店舗での検証を行った。
1
先端技術応用研究所
先端技術ソリューショングループ
薮崎 良介・中山 浩
(2)試験結果
背景と目的
9 日間培養した結果を第 1 写真に示す。写真に示すよう
に、カビは試験区 No.1(湿潤状態)で発生し、No.2(乾
食品スーパーでは、梅雨から夏季にかけて、冷蔵・冷凍
燥状態)で発生しなかったことから、乾燥による抑制効果
ショーケース周りの天井にカビが生えることによる見栄え悪
があることを確認した。試験区 No.1、3 を比較すると、
化や店内衛生環境の改善が課題となっている。コロナ禍にお
試験区 No.3 は、カビが発生しなかったことから、本試験
いて、人が快適かつ安心して過ごせる「空間」
「空気」の提供
に用いた防カビボードには抑制効果があることを確認した。
は、ますますニーズが高くなっており、省エネルギーかつ衛
試験区
No.
生的な機器やシステムを開発することで、お客さまのニーズ
に応えることが可能と考えられる。そこで、当社は気流によ
初期
発育状況
9 日目
る乾燥効果や除菌効果が優れるとされる銀イオン除菌剤等に
着目し、食品スーパー向けにこれら要素技術を利用した天井
1
カビ抑制対策技術を開発する研究を実施した。
2
要素試験におけるカビ抑制効果検証
2
(1)試験概要
第 1 図に示すように、カビが増殖するには 3 つの要因
(温度、湿度、栄養)があると⾔われている。この中でコ
ントロールが可能な温度および湿度に着目し、乾燥による
抑制効果と、除菌剤が混入された吉野石膏(株)製の天井
3
石膏ボード材(以下、防カビボード)による抑制効果を確
認することを目的として試験を実施した。
第 1 写真 発育状況
試験では、通常の石膏ボートおよび防カビボードの3cm 角
カットピースを試験片として表面に黒カビ菌を塗布した。塗布
後、一定の温湿度で培養し湿潤条件の試験区において十分
にカビが発育するまで培養した。第1表に試験条件を示す。
3
カビ抑制対策の概要
(1)熱・気流による乾燥
従来、食品スーパーでのカビ対策の一つとして、天井面
に横吹きの送風機を取り付けて、乾燥させることが知られ
ている。この装置では、天井近傍の空気が吹出口から水平
に流れるため、天井に対し結露等の抑制が可能な程度の風
を行き渡らせる範囲の広さに限界がある(第 2 図 (a))
。カ
ビ発生の原因となりうる結露等の抑制に十分な量の風が、
第 1 図 カビの発生要因
天井に対し、効率良くより広範囲に行き渡る条件を確認す
第 1 表 試験条件
41
試験区 No.
試験条件
水浸漬
1
通常ボード 湿潤
有
2
通常ボード 乾燥
無
3
防カビボード 湿潤
有
技術開発ニュース 2024.03/No.168
ることを目的として、流体解析を実施し検討した。第 2 図
(b)に示すように、横吹きと風量が変わらない場合、横吹
きから上吹きに変えるだけで、1.6 ~ 2.1 倍の広範囲に乾
燥効果が得られ、さらに電気ヒータによる発熱を加えると
�
- ▲TOP
- ページ: 43
-
研 究 成 果
2.0 ~ 2.4 倍になり、更なる効果を得られることがわかっ
生状況を定期的に確認した。ATP ふき取り検査(A3 法 ) と
た。フィールド試験では、既製品の電気ヒータ付き産業用
は、すべての生物の細胞内に存在する ATP(アデノシン三
送風機を用いて効果検証することとした。
リン酸)を酵素などと組み合わせて発光させ、その発光量
(Relative Light Unit;RLU)を測定するもので、表面の
汚れや付着菌量を簡易的に評価する方法である。
(3)試験結果
ATP の測定結果を第 3 図に示す。対策無では、6 月中旬
から値が急増しているのに対し、いずれの対策を行った場
(a) 横吹き
合には、顕著な値の増加は見られず、一定の抑制効果が確
認された。ただし、熱・気流による乾燥については、6 月
途中から約 1.5 か月の間、機器が停止していた時期があっ
たため、正確な検証ができなかった。試験終了時点で、対
策無では顕著にカビが発生していたが、特に防カビボード
や銀イオン除菌剤塗布ケースについては目視でカビの発生
が認められなかった。
(b) 上吹き
第 2 図 装置の設置および効果範囲のイメージ
[RLU]
(2)防カビボード
400,000
350,000
200,000
要素試験でも用いた除菌剤が混入された吉野石膏(株)
150,000
製の石膏ボード(不燃ジプトーン防カビタイプ)を使用し
100,000
ATP
た。このボードは通常の石膏ボードの母材および表面材に
300,000
250,000
50,000
除菌剤を付加したもので、商品化前の試作サンプルにて効
0
果検証することとした。
(3)銀イオン抗菌剤
第 3 図 ATP ふき取り検査結果
要素試験において抑制効果を確認した防カビボードは新
規店舗向けとしては有効であるが、既設店舗に適用するに
は、天井材を貼りかえる必要がある。したがって、選択肢
の一つではあるものの施工の手間やコストの観点から適用
が難しい場合がある。
そこで、国立大学法人岐阜大学の協力を得て、各種除菌
技術・抑制技術を調査した結果、銀イオンが他の除菌剤と
比較しても安価で天井のカビ防止剤として期待ができたた
め、既設店舗向けとして銀イオンを既設の天井材表面に塗
布し、天井材内部に浸透させて定着できるような手法を開
(a) 対策無し (b) 防カビボード
第 2 写真 10 月 30 日におけるカビ発生状況
発し、天井材に施工した。
4
フィールド試験におけるカビ抑制効果検証
(1)試験概要
5
まとめ
カビ生育に有利な環境下であっても、防カビボードと銀
各技術のカビ抑制効果の検証と天井面におけるカビの発
イオン除菌剤は一定の抑制効果を発揮し、目視にてカビ
生状況を把握することを目的として、某食品スーパーの冷
の発生が認められなかった。銀イオン除菌剤については研
蔵・冷凍ショーケース上部に各技術を適用し、適用有無で
究段階の抗菌剤であり、商品化へ向けて更なる検証が必要
のカビの発生状況を比較した。試験期間は、2023 年 3 月
であるが、防カビボードは検証試験を進める中で、吉野石
から 10 月末までの約 8 ヶ月間とした。
膏(株)から商品化されている。食品スーパーの天井カビ
(2)試験方法
抑制対策として、本技術が活用されることが期待される。
天井石膏ボードのカビ抑制効果を確認するため ATP ふき
取り検査による汚れを指標とする検査と、目視でカビの発
技術開発ニュース 2024.03/No.168
42
�
- ▲TOP
- ページ: 44
-
研 究 成 果
Results of Research Activities
高圧配電線・充電部の離隔距離検出技術の検証
High-Voltage Distribution Line Detection Technology
高所作業車による間接活線工事の安全確保・作業省力化を支援する
デバイス実現を目指して
執筆者
)
500
800
400
100
200
400
1700
(
500
800
1700
中部電力パワーグリッド 配電部(以降「配電部」と表
(
背景と目的
200
1
先端技術応用研究所
情報技術グループ
中村 剛・難波 隆博
)
間接活線工事では作業者の安全確保のため、高所作業車のバケットが高圧充電部と離隔
距離を保つことが重要である。そこで 3D LiDAR と点群データを活用した間接検知方式
による充電部との離隔距離算定の技術を検証評価し、間接活線工事における安全確保や現
場作業の省力化を支援するデバイスの実現可能性を見いだした。
100
記)では、これまでの直接活線作業による配電線工事を
2025 年度以降、間接活線作業に切り替えていく方針であ
る。間接活線作業は充電部との離隔距離を保つことで安全
を確保するが、高所作業車のバケットが不用意に充電部に
接近した場合、接近に対する万全の防護を前提とした直接
活線作業よりもむしろ危険な状況となりうるため、作業者
の安全確保に係る現場監督者の監視はこれまで以上に責任
800
400
重大となる。現場監督者の負荷低減と活線作業の安全を両
立するには、充電部に対しセンシングなど、技術に基づく
安全確保が不可欠である。
第 1 図 離隔距離の検知対象領域
一方で、高圧配電線は一般的な障害物と比べて細い上、
材質的にも光への反射率が低いためセンシングの難易度が
高く、電線検出・測距に適した明確な技術は確立されてい
そこで測距センサでリアルタイムに対象充電部との離隔
ない。加えて、活線工事の際のバケットの進行方向および
距離を直接検知するのではなく、点群マップと 3D LiDAR
作業方位は工事場所により異なり、バケット周囲の全方位
の組み合わせによる間接検知を技術検証の対象として進め
を網羅する離隔距離検出が必要となる。
ることとした。
そ こ で、 様 々 な 測 距 セ ン サ の 評 価 結 果 を 踏 ま え、3D
LiDAR と事前作成した点群マップを組み合わせ、自己位置
の推定と配電線や充電部との離隔距離算出を点群空間内で
リアルタイムに行う間接検知方式を検証評価し、間接活線
工事支援デバイスの実現可能性を見いだした。
2
3
間接検知方式による充電部測距の概要
第 2 図に LiDAR による間接検知のイメージを示す。
離隔距離検出の要件
間接活線工事の支援デバイスに求められる充電部との離隔
距離検出対象の領域を第1図に示す。バケットの移動方向や
作業対象の方位は不特定のため、ピンク色に示す全方位の広
LiDAR
LiDAR
第 2 図 LiDAR による高圧充電部の間接検知
範な領域が対象となる。事前の各種測距センサの要素技術
43
評価においては、ステレオカメラおよび 3D LiDAR が屋外に
作業開始直前に作業者が LiDAR で作業箇所をスキャン
おいて高圧配電線のような細く光への反射率の低い物体に対
し、事前点群マップを生成する。その後 LiDAR を高所作業
し、良好な測距性能を確認していた。しかしながら、離隔距
車に載せ替え、LiDAR の周囲情報から点群マップ内での自
離検出の要件検討の結果、バケット周囲の広範な領域をこれ
己位置を推定し充電部との離隔距離を算出、近接状態でア
らのセンサを用いて充電部までの離隔距離を直接的に検出す
ラートを発報する。障害物を直接検知しないため、1 台の
るのは、センサ設置台数的に困難であることが判明した。
LiDAR で広範囲の領域の離隔距離を網羅できるのがメリッ
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 45
-
研 究 成 果
トである。一方でデメリットとしては、作業の都度、事前
点群マップの生成が必要なため、本来作業の支障とならな
いよう極力短時間で簡便に生成可能なことが要求される。
4
PC
性能検証
間接検知の検証は第 3 図に示す構成の機器を用い、配
電部の訓練所(名古屋市内)にて行った。解析用 PC と
90
LiDAR をセットにして点群マップ内での自己位置推定と
第 4 図 事前点群マップ(90 秒間で作成)
離隔距離算出を行い、対象領域内に障害物を検知するとア
第 5 図は LiDAR を高所作業車のバケットに載せ替え、リ
ラートを発報する仕組みとした。
アルタイムに自己位置推定、および離隔距離算出・評価を
BOX
LiDAR
2
BOX
行っている様子である。画面内の青色の点が事前取得マッ
プの点群、赤色の点がバケット上から LiDAR がリアルタイ
LAN
ムにスキャンしている点群を表している。これらが精度良
IMU
く重なっていることから、自己位置推定に成功しているこ
PC
とがわかる。画面内の赤い輪は LiDAR 位置を示しており、
USB
真上の朱色の点は検知対象領域内(バケット頭上)に高圧
Wi-Fi
配電線が近接状態であることを表している。バケット上か
Wi-Fi
ら配電線への距離を実測して比較した算出離隔距離も誤差
が最大 3cm 程度、演算処理時間も最大で 235ms 程度と良
Wi-Fi
LAN
好な結果が得られた。
PC
第 3 図 検証用機器構成
検証結果をまとめたのが第 1 表である。事前マップ作成
3
(
(
)
)
では 45 ~ 90 秒程度の作成時間(スキャン+生成処理)で
も、高圧充電部の各装置が目視で十分認識できる密度の
マップが得られ、良好な結果となった。
LiDAR
(
)
第 1 表 性能検証の目標と結果
項目
目標
結果
以下の障害物が点群マップと
して捕捉可能なこと
・高圧線
目標対象物をすべて目
マップ
・引留クランプ
視で認識できる密度の
作製対象
・引下線
点群取得が可能
・耐雷 pc
・変圧器の高圧ブッシング
3 分以内
マップ
(LiDAR スキャン+
作製時間
点群マップ作製処理)
45 ~ 90 秒
誤差 10cm 以内(水平+垂直) 最大誤差 3cm、
アラート
LiDAR 照射範囲外の障害物も バ ケ ッ ト 直 下 ( 死 角 )
発報距離
の共架線も検知
検知可能なこと
総合
0.5 秒以内
処理時間
235.2ms( 最大 )
評価
LiDAR
第 5 図 自己位置推定・近接状態検知の様子
〇
〇
〇
〇
5
今後の展開
今回の検証により、LiDAR を用いた間接検知方式がバ
ケット周囲の広範囲な領域における充電部との離隔距離検
出に有用な技術である可能性が見いだせた一方、配電訓練
所以外の環境で同様の性能を発揮できるかは未評価であ
る。また、間接工事支援デバイスとしての実現に向けて
は、作業者の技量によらず適切な点群密度の事前点群マッ
第 4 図は 90 秒間で作業箇所をスキャンした際の事前作
プが作成可能な支援機能などの具備も必要である。今後、
成マップの例である。45 秒・60 秒でスキャンした場合は
配電訓練所以外での環境、例えば森林地帯において枝葉の
若干点群の密度が低下するものの、十分認識できるレベル
揺らぎが自己位置推定の精度に与える影響や、LiDAR のス
であった。一方で、LiDAR 操作に不慣れな作業員がスキャ
キャンを遮る街中の狭隘箇所で事前マップが精度良く生成
ンした場合、LiDAR のレーザー光が対象箇所に適切に照射
可能かなど、配電訓練所以外の環境での性能評価を進める
されず、作業箇所の点群密度が著しく低くなるといった課
予定である。
題も見いだされた。
技術開発ニュース 2024.03/No.168
44
�
- ▲TOP
- ページ: 46
-
研 究 成 果
Results of Research Activities
半教師あり学習画像 AI による生産品目判別・
計量技術の検証
Application of Semi-Supervised Learning AI to Classification in Production Lines
生産ラインでのエネルギー原単位改善に向けた安価・簡便な生産情報
の取得
工場での生産ラインのエネルギー原単位改善には、エネルギー使用情報に加え、品目や
数量の情報が不可欠である。教師データ準備の手間が少ない半教師あり学習によって生成
した画像 AI と汎用的なエッジデバイスを組み合わせ、内製化により安価で簡便にリアル
タイムで生産品目の判別・計量が可能なデバイスの実現性を見出した。
1
背景と目的
執筆者
先端技術応用研究所
情報技術グループ
中村 剛
グが必要であるのに対し、半教師あり学習では収集した教
師画像の一部へのラベル付けでモデル学習が可能である。
複数の半教師あり学習アルゴリズムを評価し、性能やパラ
IoT やクラウドといった ICT 技術は様々な業種や分野の
メータ設定の容易さなどから FixMatch[2] を用いて開発を
業務に進化をもたらした。中部電力ミライズにおいても、
進めることとした。
こうした技術を活用し、工場のユーティリティ設備である
コンプレッサの電力使用状況をリアルタイムでモニタリン
グ・分析してチューニングを行うコンプレッサ IoT 最適運
用サービス [1] など、新たなお客さま向けサービスの創出
へと繋がった。一方で、生産設備の省エネ・運用改善支援
サービス(エネルギー原単位の改善)では、電流や空気量
といったエネルギー使用量に加え、ラインを流れるワーク
AI
の品目や数量といった生産情報の収集が不可欠である。数
(
量は近接スイッチなどで容易に把握可能だが、品目情報は
)
お客さまの手書き帳票でしか提供されないなど、データの
精度や入手性に課題があった。
昨今の AI 技術の進展は著しく、画像 AI による判別を利
用すれば、生産ラインに設置したカメラ画像によりリアル
タイムな品目判別・計量の実現が期待できる。しかしなが
ら、一般的に画像 AI を活用するには膨大な量の学習データ
第 1 図 教師あり学習と半教師あり学習の比較(例)
(教師画像取得+ラベリング)が必要である。対象品目が
毎回不特定であり、設置が短期間なお客さま生産ラインの
省エネ支援の用途となると、都度大掛かりな学習データ準
備と AI モデル改修は画像 AI 技術活用の大きなハードルと
3
検証環境の構築と評価
なる。
学習データには、第 2 図に示す 11 種類の市販の煎餅菓
そこで、半教師あり学習 AI のアルゴリズムを用いて、学
子を生産品目に見立て、第 3 図のように背景差分法を用い
習データ準備の手間やコストを極力抑えつつ、汎用デバイ
てベルトコンベア上を流れる煎餅の画像をトリミングして
スやオープンソースソフトウェア (OSS) を活用した内製化
保存した(各 100 枚 x11 種類)。
により、安価で簡便な工場生産ライン向けの画像 AI 判別・
計量デバイスの試作・評価を行った。
2
半教師あり学習 AI の概要
半教師あり学習とは、少量のラベルありデータと大量の
ラベルなしデータを用いて学習させる AI モデル生成手法で
ある。第 1 図に教師あり学習との比較の例を示す。犬と猫
の判別を行う AI モデルを学習する場合、従来の教師あり学
習では収集した教師画像のすべてに犬または猫のラベリン
45
技術開発ニュース 2024.03/No.168
第 2 図 学習データ(煎餅 11 種類)
�
- ▲TOP
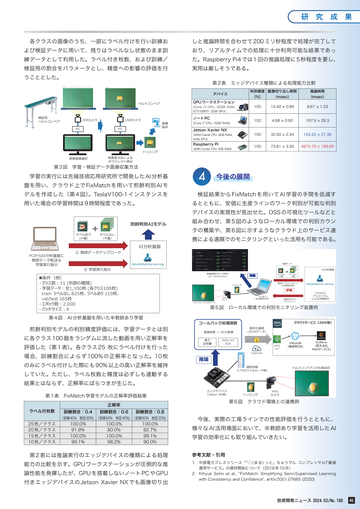
- ページ: 47
-
研 究 成 果
各クラスの画像のうち、一部にラベル付けを行い訓練お
しと推論時間を合わせて 200 ミリ秒程度で処理が完了して
よび検証データに用いて、残りはラベルなし状態のまま訓
おり、リアルタイムでの処理に十分利用可能な結果であっ
練データとして利用した。ラベル付き枚数、および訓練/
た。Raspberry Pi4 では 1 回の推論処理に 5 秒程度を要し、
検証用の割合をパラメータとし、精度への影響の評価を行
実用は厳しそうである。
うこととした。
第 2 表 エッジデバイス種類による処理能力比較
判別精度 画像切り出し時間
デバイス
GPU ワークステーション
(Core i7 CPU, 32GB RAM,
GTX1080Ti 12GB GPU)
USB
ノート PC
USB
PC
(Core i7 CPU, 16GB RAM)
Jetson Xavier NX
PC
(ARM Camel CPU, 8GB RAM,
Volta GPU)
Raspberry Pi
(ARM Cortex CPU, 4GB RAM)
第 3 図 学習・検証データ画像収集方法
学習の実行には先端技術応用研究所で開発した AI 分析基
盤を用い、クラウド上で FixMatch を用いて煎餅判別 AI モ
4
推論時間
(%)
(msec)
(msec)
100
15.42 ± 0.99
8.67 ± 1.33
100
4.88 ± 0.90
197.9 ± 28.3
100
32.90 ± 2.34
163.22 ± 21.36
100
73.81 ± 3.30
4874.79 ± 189.99
今後の展開
デルを作成した(第 4 図)。TeslaV100-1 インスタンスを
検証結果から FixMatch を用いて AI 学習の手間を低減す
用いた場合の学習時間は 9 時間程度であった。
るとともに、安価に生産ラインのワーク判別が可能な判別
デバイスの実現性が見出せた。OSS の可視化ツールなどと
AI
(
)
(
組み合わせ、第 5 図のようなローカル環境での判別カウン
タの構築や、第 6 図に示すようなクラウド上のサービス連
携による遠隔でのモニタリングといった活用も可能である。
)
AI
PC
AI
AI
(
-
11 (
1,100
825
train
val/test 165
2,000
4
-
(
)
100 )
110
Grafana)
(
)
(
)
FixMatch
PC
Web
第 5 図 ローカル環境での判別モニタリング装置例
第 4 図 AI 分析基盤を用いた半教師あり学習
煎餅判別モデルの判別精度評価には、学習データとは別
に各クラス 100 個をランダムに流した動画を用い正解率を
評価した(第 1 表)。各クラス 25 枚にラベル付けを行った
AWS
(JSON
JSON
AWS-IoT
SDK
)
AWS
IoT
(
InfluxDB
DB)
Internet
場合、訓練割合によらず 100% の正解率となった。10 枚
のみにラベル付けした際にも 90% 以上の高い正解率を維持
Grafana
(
Web
)
LTE
していた。ただし、ラベル枚数と精度は必ずしも連動する
結果とはならず、正解率にばらつきが生じた。
第 1 表 FixMatch 学習モデルの正解率評価結果
ラベル付枚数
25 枚/クラス
20 枚/クラス
15 枚/クラス
10 枚/クラス
正解率
訓練割合:0.4
訓練割合:0.6
訓練割合:0.8
100.0%
91.8%
100.0%
99.1%
100.0%
80.0%
100.0%
98.2%
100.0%
82.7%
99.1%
90.0%
(訓練40% 検証60%) (訓練60% 検証40%) (訓練80% 検証20%)
第 2 表には推論実行のエッジデバイスの種類による処理
能力の比較を示す。GPU ワークステーションが圧倒的な推
論性能を発揮したが、GPU を搭載しないノート PC や GPU
付きエッジデバイスの Jetson Xavier NX でも画像切り出
(Jetson NX
)
Web
第 6 図 クラウド環境との連携例
今後、実際の工場ラインでの性能評価を行うとともに、
様々な AI 活用場面において、半教師あり学習を活用した AI
学習の効率化にも取り組んでいきたい。
参考文献・引用
1. 中部電力プレスリリース「「○ ( まる ) っと」ちゅうでん コンプレッサ IoT 最適
運用サービス」の提供開始について(2018 年 10 月)
2. Kihyuk Sohn et al., “FixMatch: Simplifying Semi-Supervised Learning
with Consistency and Confidence”, arXiv:2001.07685 (2020)
技術開発ニュース 2024.03/No.168
46
�
- ▲TOP
- ページ: 48
-
研 究 成 果
Results of Research Activities
送変電設備の教師無し学習による異常検出技術
Unsupervised Anomaly Detection for Power Transmission and Substation Equipment
異常データが不要な機械学習
パターン認識タスクにおいては一般に大量の異常データの収集が難しいため、通常の教
師有り学習を適用できないケースも多い。本研究では送変電設備を対象として、ラベル無
しの正常データのみから識別モデルの学習を行う「教師無し学習」による異常検出につい
て検討を行い、提案手法の有効性評価を行った。
1
執筆者
先端技術応用研究所
情報技術グループ
瀬川 修
背景と目的
将来の設備保守業務の自動化に向けては、コンピュータ
ビジョンによる設備状態の把握が重要な要素技術になると
考えられる。一般にパターン認識タスクにおいては、対象
物体のカテゴリラベル付きデータを用意して識別モデルの
教師有り学習を行うことが多い。しかしながら、一般に異
常データを判別するタスクにおいては大量の異常データの
第 1 図 Patch Core の概要
収集が難しい上に、多様な異常状態を網羅的に定義するこ
と自体が困難である。
Patch Core の学習においては、前記 CNN の複数の中間
こ の た め、 最 近 で は ラ ベ ル 無 し の 正 常 デ ー タ の み
層の出力を組み合わせた特徴量を用いる。これにより、入
か ら 異 常 検 出 の モ デ ル を 学 習 す る「 教 師 無 し 学 習 」
力した正常画像から局所的な特徴を表すベクトル表現が獲
(Unsupervised-learning)のアプローチが盛んに検討さ
れるようになった。本稿では送変電設備を対象とした教師
推論時には、学習時と同一の CNN を利用し、入力画像
無し学習による異常検出手法の概要と、提案手法の有効性
から局所的なベクトル表現集合を抽出する。そして、各ベ
評価について述べる。
2
問題設定
クトル表現に対しK 近傍法により、メモリバンク内で類似
したベクトル表現が選択され、それらとの距離が算出され
る。そして、各ベクトル表現に対する距離を統合すること
で、未知画像の異常スコアを得る。また、各ベクトル表現
本研究で検討した対象問題は下記のとおりである。いず
に対する距離をヒートマップとして可視化することより異
れも異常状態の画像が収集しづらいタスクである。
常箇所のセグメンテーション結果を得る。
(1) 変電設備の異常状態の判別
変圧器等のオイルクーラーの配管継手からの漏油
(2) 送電設備の異常状態の判別
送電線の落雷による溶痕
3
アルゴリズム検討
教師無し学習を用いた異常検出には、(1) 入力画像の特
徴量を抽出し「正常状態の特徴分布」からの乖離度を評
価する方法、および (2) 入力画像を何らかの生成モデルで
4
評価
Patch Core のベクトル表現抽出用の事前学習モデル
と し て Wide ResNet50 を 用 い た。 評 価 指 標 に は 異 常
検 出 タ ス ク で 一 般 的 な AUROC(Area Under Receiver
Operator Characteristic Curve)を用いた。
(1)変電設備の漏油箇所の検出
学習データとして、変電所設備のオイルクーラー配管継
再構成し、入出力画像の差分を評価する方法の 2 つのア
手の正常データ 80 枚(336×336 にリサイズ)を用いた。
プローチがある。本稿では (1) のアプローチ一つである
評価データとして、正常データ 10 枚、画像加工により異
Patch Core [1] を用いた。
常(漏油)を付加した模擬データ 10 枚の合計 20 枚を用い
Patch Core の概要を第 1 図に示す。同手法では、正常
た。漏油の検出例を第 2 図に示す。同図から、異常検出モ
画像の特徴量を抽出し、正常状態の特徴分布を反映したベ
デルにより正確に異常箇所が可視化されていることが確認
クトル表現のデータベース(メモリバンク)を構成する。
できる。異常検出の AUROC は 100 となり、少量の正常
この時、大量の画像データベースから事前学習された汎用
データで画角変化に対し頑健な異常検出が可能なことがわ
CNN の特徴マップを利用するため、少量の正常データで学
かった。
習した場合でも高い検出精度が期待できる。
47
得され、メモリバンクに保存される。
技術開発ニュース 2024.03/No.168
�
- ▲TOP
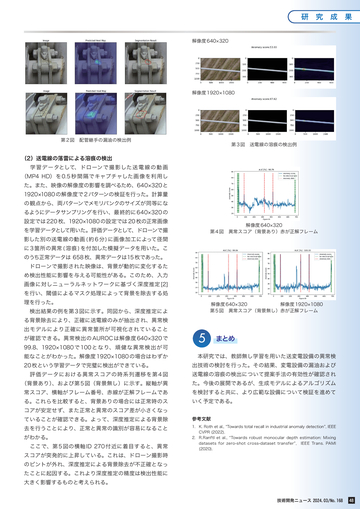
- ページ: 49
-
研 究 成 果
解像度 640×320
解像度 1920×1080
第 2 図 配管継手の漏油の検出例
第 3 図 送電線の溶痕の検出例
(2)送電線の落雷による溶痕の検出
学 習データとして、 ドローンで撮 影した 送 電 線の動 画
(MP4 HD)を 0.5 秒間隔でキャプチャした画 像を利用し
た。また、映像の解像度の影響を調べるため、640×320と
1920×1080 の解像度で 2 パターンの検証を行った。計算量
の観点から、両パターンでメモリバンクのサイズが同等にな
るようにデータサンプリングを行い、最終的に640×320 の
設定では 220 枚、1920×1080 の設定では 20 枚の正常画像
解像度 640×320
第 4 図 異常スコア(背景あり)赤が正解フレーム
を学習データとして用いた。評価データとして、ドローンで撮
影した別の送電線の動画( 約 6 分 )に画像加工によって径間
に 3 箇所の異常( 溶痕 )を付加した模擬データを用いた。こ
のうち正常データは 658 枚、異常データは15 枚であった。
ドローンで撮影された映像は、背景が動的に変化するた
め検出性能に影響を与える可能性がある。このため、入力
画像に対しニューラルネットワークに基づく深度推定 [2]
を行い、閾値によるマスク処理によって背景を除去する処
理を行った。
検出結果の例を第 3 図に示す。同図から、深度推定によ
解像度 640×320 解像度 1920×1080
第 5 図 異常スコア(背景無し)赤が正解フレーム
る背景除去により、正確に送電線のみが抽出され、異常検
出モデルにより正確に異常箇所が可視化されていること
が確認できる。異常検出の AUROC は解像度 640×320 で
99.8、1920×1080 で 100 となり、頑健な異常検出が可
5
まとめ
能なことがわかった。解像度 1920×1080 の場合はわずか
本研究では、教師無し学習を用いた送変電設備の異常検
20 枚という学習データで完璧に検出ができている。
出技術の検討を行った。その結果、変電設備の漏油および
評価データにおける異常スコアの時系列遷移を第 4 図
送電線の溶痕の検出について提案手法の有効性が確認され
(背景あり)、および第 5 図(背景無し)に示す。縦軸が異
た。今後の展開であるが、生成モデルによるアルゴリズム
常スコア、横軸がフレーム番号、赤線が正解フレームであ
を検討すると共に、より広範な設備について検証を進めて
る。これらを比較すると、背景ありの場合には正常時のス
いく予定である。
コアが安定せず、また正常と異常のスコア差が小さくなっ
ていることが確認できる。よって、深度推定による背景除
去を行うことにより、正常と異常の識別が容易になること
がわかる。
ここで、第 5 図の横軸 ID 270 付近に着目すると、異常
スコアが突発的に上昇している。これは、ドローン撮影時
参考文献
1. K. Roth et al., “Towards total recall in industrial anomaly detection”, IEEE
CVPR (2022).
2. R.Ranftl et al., “Towards robust monocular depth estimation: Mixing
datasets for zero-shot cross-dataset transfer”, IEEE Trans. PAMI
(2020).
のピントが外れ、深度推定による背景除去が不正確となっ
たことに起因する。これより深度推定の精度は検出性能に
大きく影響するものと考えられる。
技術開発ニュース 2024.03/No.168
48
�
- ▲TOP
- ページ: 50
-
研 究 成 果
Results of Research Activities
ヒューマンエラー事象のテキストマイニング技術
A Text Mining Method for Human Error Events
ヒヤリハットのビッグデータを有効活用
ヒヤリハット事例は、ヒューマンエラーの発生傾向、因果関係、背景要因等の各種分析
において有用性が高い。これまでにグループ会社全体で約 50 万件の膨大な事例が蓄積さ
れているが、これらビッグデータを有効活用するための分析手段が十分検討されていな
い。そこで、本研究ではヒヤリハット事例を知識資産として活用するためのテキストマイ
ニング技術を検討した。
1
背景と目的
テキストマイニング(Text Mining)とは、構造化され
ていない曖昧な⾔語情報から有用な知識を抽出する分析技
3
執筆者
先端技術応用研究所
情報技術グループ
瀬川 修
分析手法の概要
(1)関連キーワード推定
特定の状況(シチュエーション)を「交差点+危険+
術である。具体的には、文書に含まれる単語の統計量や意
死角」のように単語の意味ベクトルの加減算によって合
味的な関連性に基づき、カテゴリ分類、トピック抽出、
成し、当該文脈における関連キーワードを推定する手法
キーワード分析などを実現する自然⾔語処理技術である。
を考案した。具体的には、何らかのシチュエーションを
我々は、これまで顧客意見や学術情報を対象とした独自の
Word2Vec など自己教師あり学習に基づく⾔語モデルを用
テキストマイニング技術の開発を行い、ビッグデータの分
いて「単語分散表現」のベクトルで表現し、当該ベクトル
析支援ツールとしての有効性を確認している。本稿では、
に類似したキーワードを近傍検索することにより意味的に
最新の取り組みとして、ヒューマンエラー事象を対象とし
関連の深いキーワードを推定する。
た分析手法の概要と有効性評価について述べる。
(2)因果関係分析
⾔語モデル BERT で用いられている Masked Language
2
ヒヤリハット事例の分析
「ヒヤリハット」とは事故や災害につながりそうな事例
を収集し、ヒューマンエラー防止に寄与する情報を共有す
る取り組みである。蓄積された事例データは、ヒューマン
Model(MLM)を応用し、入力されたトークン系列のマス
ク箇所を推定することによって因果関係にある概念を推定
する手法を考案した。複数のマスクがある場合は、ビーム
サーチによりマスク箇所のトークン系列を推定する。
(3)対策立案
ヒヤリハットデータの約 6 割には、再発防止のための対
エラーの発生傾向、因果関係、背景要因等の各種分析にお
策が記述されており、これらの情報は危険予知や対策立案
いて有用性が高い。これまでにグループ会社全体で約 50
などに有用な情報である。この約 27 万件の「事象と対策
万件の膨大な事例が蓄積されているが、ビッグデータを有
のペア」を知識源として、LLM の一種である T5 の事前学
効活用するための分析手段が十分検討されていない。そこ
習モデルのファイチューニングを行い、検索質問の事象に
で、本研究ではヒヤリハット事例を知識資産として活用す
るためのテキストマイニング技術を検討した ( 第 1 図 )。
以下、本稿では各種分析手法の中で、キーワード分析、
対し適切な対策文を生成する手法を考案した。
(4)要約
Transformer に 基 づ く 自 己 回 帰 型 LLM を 用 い た 生 成
対策立案、要約について主に大規模⾔語モデル(Large
型要約手法について初期検討を行った。今回用いた LLM
Language Model: LLM)に基づく手法について検討した
はオープンソースとして公開されている Llama2 の日本
結果を述べる。
語 モ デ ル(ELYZA- Japanese-Llama-2-7b、 パ ラ メ ー
タ 数 70 億 )、 お よ び GPT-NeoX の 日 本 語 モ デ ル(rinna/
japanese-gpt-neox-3.6b、パラメータ数 36 億)である。
ここで、オープンソースの LLM を利用するメリットで
あるが、分野やタスクに特化した独自の学習(ファイン
チューニング)が可能なこと。また、クローズドな環境で
運用の内製化が可能などの点が挙げられる。
第 1 図 ヒヤリハット事例のテキストマイニング技術
49
技術開発ニュース 2024.03/No.168
�
- ▲TOP
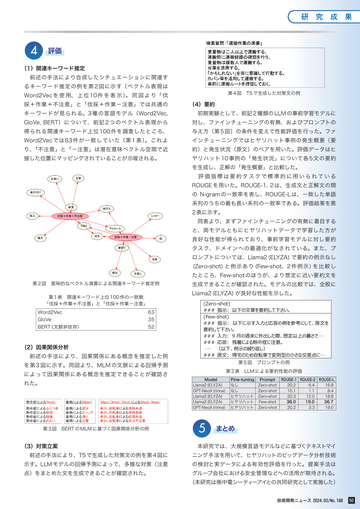
- ページ: 51
-
研 究 成 果
4
評価
(1)関連キーワード推定
前述の手法により合成したシチュエーションに関連す
るキーワード推定の例を第 2 図に示す(ベクトル表現は
Word2Vec を 使 用、 上 位 10 件 を 表 示 )。 同 図 よ り「 伐
採+作業+不注意」と「伐採+作業-注意」では共通の
キーワードが見られる。3 種の⾔語モデル(Word2Vec,
第 4 図 T5 で生成した対策文の例
(4)要約
初期実験として、前記 2 種類の LLM の事前学習モデルに
GloVe, BERT)について、前記 2 つのベクトル表現から
対し、ファインチューニングの有無、およびプロンプトの
得られる関連キーワード上位 100 件を調査したところ、
与え方(第 5 図)の条件を変えて性能評価を行った。ファ
Word2Vec では 63 件が一致していた(第 1 表)。これよ
インチューニングではヒヤリハット事例の発生概要(要
り、「不注意」と「-注意」は潜在意味ベクトル空間で近
約)と発生状況(原文)のペアを用いた。評価データはヒ
接した位置にマッピングされていることが示唆される。
ヤリハット 10 事例の「発生状況」について各 5 文の要約
を生成し、正解の「発生概要」と比較した。
評価指標は要約タスクで標準的に用いられている
ROUGE を用いた。ROUGE-1, 2 は、生成文と正解文の間
の N-gram の一致率を表し、ROUGE-L は、一致した単語
系列のうちの最も長い系列の一致率である。評価結果を第
2 表に示す。
同表より、まずファインチューニングの有無に着目する
と、両モデルともにヒヤリハットデータで学習した方が
良好な性能が得られており、事前学習モデルに対し要約
タスク、ドメインへの最適化がなされている。また、プ
ロンプトについては、Llama2(ELYZA) で要約の例示なし
(Zero-shot) と例示あり (Few-shot、2 件例示 ) を比較し
第 2 図 意味的なベクトル演算による関連キーワード推定例
生成できることが確認された。モデルの比較では、全般に
Llama2(ELYZA) が良好な性能を示した。
第 1 表 関連キーワード上位 100 件の一致数
「伐採+作業+不注意」と「伐採+作業-注意」
Word2Vec
63
BERT(文脈非依存)
52
GloVe
たところ、Few-shot のほうが、より想定に近い要約文を
35
(2)因果関係分析
前述の手法により、因果関係にある概念を推定した例
(Zero-shot)
###
:
(Few-shot)
###
:
###
###
…
###
: 9
:
:
を第 3 図に示す。同図より、MLM の文脈による回帰予測
によって因果関係にある概念を推定できることが確認さ
れた。
第 3 図 BERT の MLM に基づく因果関係分析の例
(3)対策立案
…
第 5 図 プロンプトの例
…
第 2 表 LLM による要約性能の評価
Model
Llama2(ELYZA)
GPT-NeoX(rinna)
Llama2(ELYZA)
Llama2(ELYZA)
GPT-NeoX(rinna)
5
Fine-tuning Prompt
なし
Zero-shot
なし
Zero-shot
ヒヤリハット Zero-shot
ヒヤリハット Few-shot
ヒヤリハット Zero-shot
ROUGE-1 ROUGE-2 ROUGE-L
20.2
6.4
16.8
10.1
1.1
8.4
20.3
12.0
18.8
38.0
19.0
36.7
20.2
3.3
19.0
まとめ
本研究では、大規模⾔語モデルなどに基づくテキストマイ
前述の手法により、T5 で生成した対策文の例を第 4 図に
ニング手法を用いて、ヒヤリハットのビッグデータ分析技術
示す。LLM モデルの回帰予測によって、多様な対策(注意
の検討と実データによる有効性評価を行った。提案手法は
点)をまとめた文を生成できることが確認された。
グループ会社における安全管理などへの活用が期待される。
(本研究は㈱中電シーティーアイとの共同研究として実施した)
技術開発ニュース 2024.03/No.168
50
�
- ▲TOP
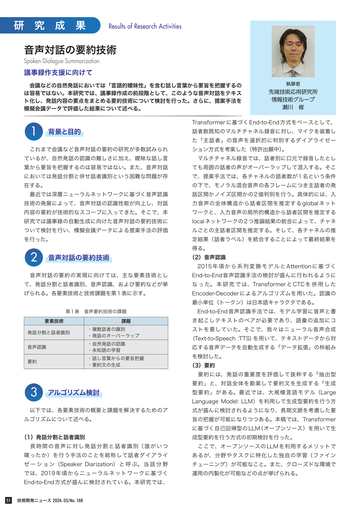
- ページ: 52
-
研 究 成 果
Results of Research Activities
音声対話の要約技術
Spoken Dialogue Summarization
議事録作支援に向けて
会議などの自然発話においては「言語的曖昧性」を含む話し言葉から要旨を把握するの
は容易ではない。本研究では、議事録作成の前段階として、このような音声対話をテキス
ト化し、発話内容の要点をまとめる要約技術について検討を行った。さらに、提案手法を
模擬会議データで評価した結果について述べる。
1
執筆者
先端技術応用研究所
情報技術グループ
瀬川 修
Transformer に基づく End-to-End 方式をベースとして、
背景と目的
話者数既知のマルチチャネル録音に対し、マイクを装着し
た「主話者」の音声を選択的に判別するダイアライゼー
これまで会議など音声対話の要約の研究が多数試みられ
ション方式を考案した(特許出願中)。
ているが、自然発話の認識の難しさに加え、曖昧な話し⾔
マルチチャネル録音では、話者別に口元で録音したとし
葉から要旨を把握するのは容易ではない。また、音声対話
ても周囲の話者の声がオーバーラップして混入する。そこ
においては発話分割と併せ話者識別という困難な問題が存
で、提案手法では、各チャネルの話者数が 1 名という条件
在する。
の下で、モノラル混合音声の各フレームにつき主話者の発
最近では深層ニューラルネットワークに基づく音声認識
話区間かノイズ区間かの 2 値判別を行う。具体的には、入
技術の発展によって、音声対話の認識性能が向上し、対話
力音声の全体構造から話者区間を推定する global ネット
内容の要約が技術的なスコープに入ってきた。そこで、本
ワークと、入力音声の局所的構造から話者区間を推定する
研究では議事録の自動生成に向けた音声対話の要約技術に
local ネットワークの 2 つ推論結果の統合によって、チャネ
ついて検討を行い、模擬会議データによる提案手法の評価
ルごとの主話者区間を推定する。そして、各チャネルの推
を行った。
定結果(話者ラベル)を統合することによって最終結果を
2
得る。
音声対話の要約技術
(2)音声認識
2015 年 頃 か ら 系 列 変 換 モ デ ル と Attention に 基 づ く
音声対話の要約の実現に向けては、主な要素技術とし
End-to-End 音声認識手法の検討が盛んに行われるように
て、発話分割と話者識別、音声認識、および要約などが挙
な っ た。 本 研 究 で は、Transformer と CTC を 併 用 し た
げられる。各要素技術と技術課題を第 1 表に示す。
Encoder-Decoder によるアルゴリズムを用いた。認識の
最小単位(トークン)は日本語キャラクタである。
第 1 表 音声要約技術の課題
要素技術
課題
発話分割と話者識別
・複数話者の識別
・発話のオーバーラップ
音声認識
・自然発話の認識
・未知語の学習
要約
・話し⾔葉からの要旨把握
・要約文の生成
End-to-End 音声認識手法では、モデル学習に音声と書
き起こしテキストのペアが必要であり、語彙の追加にコ
ストを要していた。そこで、我々はニューラル音声合成
(Text-to-Speech :TTS) を用いて、テキストデータから対
応する音声データを自動生成する「データ拡張」の枠組み
を検討した。
(3)要約
要約には、発話の重要度を評価して抜粋する「抽出型
3
アルゴリズム検討
以下では、各要素技術の概要と課題を解決するためのア
ルゴリズムについて述べる。
(1)発話分割と話者識別
長 時 間 の 音 声 に 対 し 発 話 分 割 と 話 者 識 別( 誰 が い つ
喋ったか)を行う手法のことを総称して話者ダイアライ
ゼ ー シ ョ ン(Speaker Diarization) と 呼 ぶ。 当 該 分 野
では、2019 年頃からニューラルネットワークに基づく
End-to-End 方式が盛んに検討されている。本研究では、
51
技術開発ニュース 2024.03/No.168
要約」と、対話全体を勘案して要約文を生成する「生成
型要約」がある。最近では、大規模⾔語モデル(Large
Language Model: LLM)を利用して生成型要約を行う方
式が盛んに検討されるようになり、長期文脈を考慮した要
旨の把握が可能になりつつある。本稿では、Transformer
に基づく自己回帰型の LLM(オープンソース)を用いて生
成型要約を行う方式の初期検討を行った。
ここで、オープンソースの LLM を利用するメリットで
あるが、分野やタスクに特化した独自の学習(ファイン
チューニング)が可能なこと。また、クローズドな環境で
運用の内製化が可能などの点が挙げられる。
�
- ▲TOP
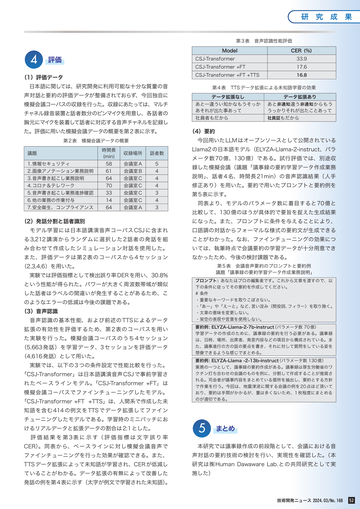
- ページ: 53
-
研 究 成 果
第 3 表 音声認識性能評価
4
Model
評価
(1)評価データ
CSJ-Transformer
33.9
CSJ-Transformer +FT
17.6
CSJ-Transformer +FT +TTS
16.8
日本語に関しては、研究開発に利用可能な十分な質量の音
第 4 表 TTS データ拡張による未知語学習の効果
声対話と要約の評価データが整備されておらず、今回独自に
模擬会議コーパスの収録を行った。収録にあたっては、マルチ
チャネル録音装置と話者数分のピンマイクを用意し、各話者の
胸元にマイクを装着して話者に対応する音声チャネルを記録し
た。評価に用いた模擬会議データの概要を第 2 表に示す。
時間長
(min)
収録場所
話者数
58
64
会議室 B
5
3. 音声書き起こし業務説明
61
会議室 A
会議室 C
4
5. 音声書き起こし業務進捗確認
33
会議室 C
会議室 C
4
1. 情報セキュリティ
2. 画像アノテーション業務説明
4. コロナ&テレワーク
6. 他の業務の作業付与
7. 安全衛生、コンプライアンス
70
14
64
データ拡張なし
あと一違うい知かなもうそっか
あそれが出た事あって
社員者もだから
データ拡張あり
あと非通知 違う非通知 からもう
うっかりそれが出たことあって
社員証もだから
(4)要約
今回用いた LLM はオープンソースとして公開されている
第 2 表 模擬会議データの概要
議題
CER (%)
会議室 C
会議室 A
Llama2 の日本語モデル(ELYZA-Llama-2-instruct、パラ
メータ数 70 億、130 億)である。試行評価では、別途収
録した模擬会議(議題「議事録の要約学習データ作成業務
4
説明」、話者 4 名、時間長 21min)の音声認識結果(人手
3
第 5 表に示す。
4
3
(2)発話分割と話者識別
修正あり)を用いた。要約で用いたプロンプトと要約例を
同表より、モデルのパラメータ数に着目すると 70 億と
比較して、130 億のほうが具体的で要旨を捉えた生成結果
になった。また、プロンプトに条件を与えることにより、
モデル学習には日本語講演音声コーパス CSJ に含まれ
口語調の対話からフォーマルな様式の要約文が生成できる
る 3,212 講演からランダムに選択した 2 話者の発話を組
ことがわかった。なお、ファインチューニングの効果につ
み合わせて作成したシミュレーション対話を使用した。
いては、執筆時点で会議要約の学習データが十分用意でき
また、評価データは第 2 表のコーパスから 4 セッション
なかったため、今後の検討課題である。
(2,3,4,6)を用いた。
実験では評価指標として検出誤り率 DER を用い、30.8%
という性能が得られた。パワーが大きく周波数帯域が類似
した話者はラベルの間違いが発生することがあるため、こ
のようなエラーの低減は今後の課題である。
(3)音声認識
音声認識の基本性能、および前述の TTS によるデータ
拡張の有効性を評価するため、第 2 表のコーパスを用い
た実験を行った。模擬会議コーパスのうち 4 セッション
(5,663 発話)を学習データ、3 セッションを評価データ
(4,616 発話)として用いた。
実験では、以下の 3 つの条件設定で性能比較を行った。
「CSJ-Transformer」は日本語講演音声 CSJ で事前学習さ
れ た ベ ー ス ラ イ ン モ デ ル。「CSJ-Transformer +FT」 は
模擬会議コーパスでファインチューニングしたモデル。
「CSJ-Transformer +FT +TTS」は、人間系で作成した未
第 5 表 会議音声要約のプロンプトと要約例
議題「議事録の要約学習データ作成業務説明」
プロンプト : あなたはプロの編集者です。これから⽂章を渡すので、以
下の条件に従ってその要約を作成してください。
# 条件
・重要なキーワードを取りこぼさない。
・
「あー」や「えーと」など、⾔い淀み(間投詞、フィラー)を取り除く。
・⽂章の意味を変更しない。
・架空の表現や⾔葉を使⽤しない。
要約例 : ELYZA-Llama-2-7b-instruct(パラメータ数 70 億)
学習データの作成のために、議事録の要約を行う必要がある。議事録
は、日時、場所、出席者、発言内容などの項目から構成されている。ま
た、議事進行の方の話の要点を書き、それに対して質問をしている姿を
想像できるような感じでまとめる。
要約例 : ELYZA-Llama -2-13b-instruct(パラメータ数 130 億)
業務の⼀つとして、議事録の要約作成がある。議事録は厚⽣労働省のワ
クチン打ち合わせの会議のものを例に、分割して作成することが推奨さ
れる。司会者が議事内容をまとめている箇所を抽出し、要約とする⽅針
で作業を⾏う。今回は、地震津波に関する会議の例を 20 点ほど頂いて
おり、要約は⼿間がかかるが、量は多くないため、1 枚程度にまとめる
のが適切である。
知語を含む 414 の例文を TTS でデータ拡張してファイン
チューニングしたモデルである。学習時のミニバッチにお
けるリアルデータと拡張データの割合は 2:1 とした。
評 価 結 果 を 第 3 表 に 示 す( 評 価 指 標 は 文 字 誤 り 率
5
まとめ
CER)
。同表から、ベースラインに対し模擬会議音声で
本研究では議事録作成の前段階として、会議における音
ファインチューニングを行った効果が確認できる。また、
声対話の要約技術の検討を行い、実現性を確認した。(本
TTS データ拡張によって未知語が学習され、CER が低減し
研究は㈱ Human Dawaware Lab. との共同研究として実
ていることがわかる。データ拡張の有無によって改善した
施した)
発話の例を第 4 表に示す(太字が例文で学習された未知語)
。
技術開発ニュース 2024.03/No.168
52
�
- ▲TOP
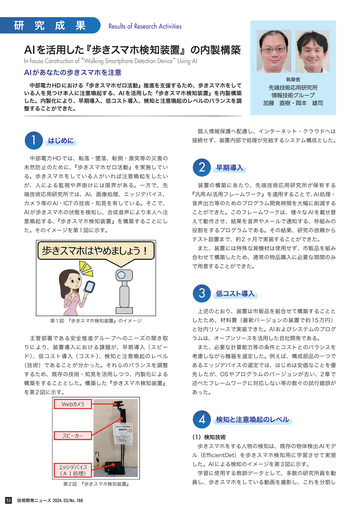
- ページ: 54
-
研 究 成 果
Results of Research Activities
AIを活用した『歩きスマホ検知装置』の内製構築
In-house Construction of“Walking Smartphone Detection Device”Using AI
AI があなたの歩きスマホを注意
中部電力 HD における『歩きスマホゼロ活動』推進を支援するため、歩きスマホをして
いる人を見つけ本人に注意喚起する、AI を活用した『歩きスマホ検知装置』を内製構築
した。内製化により、早期導入、低コスト導入、検知と注意喚起のレベルのバランスを調
整することができた。
執筆者
先端技術応用研究所
情報技術グループ
加藤 直樹・岡本 雄司
1
はじめに
中部電力 HD では、転落・墜落、転倒・激突等の災害の
未然防止のために、『歩きスマホゼロ活動』を実施してい
る。歩きスマホをしている人がいれば注意喚起をしたい
個人情報保護へ配慮し、インターネット・クラウドへは
接続せず、装置内部で処理が完結するシステム構成とした。
2
早期導入
が、人による監視や声掛けには限界がある。一方で、先
装置の構築にあたり、先端技術応用研究所が保有する
端技術応用研究所では、AI、画像処理、エッジデバイス、
『汎用 AI 活用フレームワーク』を適用することで、AI 処理・
カメラ等の AI・ICT の技術・知見を有している。そこで、
音声出力等のためのプログラム開発時間を大幅に削減する
AI が歩きスマホの状態を検知し、合成音声により本人へ注
ことができた。このフレームワークは、様々な AI を載せ替
意喚起する、『歩きスマホ検知装置』を構築することにし
えて動作させ、結果を音声やメールで通知する、枠組みの
た。そのイメージを第 1 図に示す。
役割をするプログラムである。その結果、研究の依頼から
テスト設置まで、約 2 ヶ月で実装することができた。
また、装置には特殊な資機材は使用せず、市販品を組み
合わせて構築したため、通常の物品購入に必要な期間のみ
で用意することができた。
3
低コスト導入
上述のとおり、装置は市販品を組合せて構築することと
第 1 図 『歩きスマホ検知装置』のイメージ
したため、材料費(最新バージョンの装置で約 15 万円)
と社内リソースで実装できた。AI およびシステムのプログ
主管部署である安全推進グループへのニーズの聞き取
ラムは、オープンソースを活用した自社開発である。
りにより、装置導入における課題が、早期導入(スピー
また、必要な計算能力等の条件とコストとのバランスを
ド)、低コスト導入(コスト)、検知と注意喚起のレベル
考慮しながら機器を選定した。例えば、構成部品の一つで
(技術)であることが分かった。それらのバランスを調整
あるエッジデバイスの選定では、はじめは安価なことを優
するため、既存の技術・知見を活用しつつ、内製化による
先したが、OS やプログラムのバージョンが古い、2 章で
構築をすることとした。構築した『歩きスマホ検知装置』
述べたフレームワークに対応しない等の数々の試行錯誤が
を第 2 図に示す。
あった。
4
検知と注意喚起のレベル
(1)検知技術
歩きスマホをする人物の検知は、既存の物体検出 AI モデ
ル(EfficientDet)を歩きスマホ検知用に学習させて実現
した。AI による検知のイメージを第 3 図に示す。
学習に使用する教師データとして、多数の研究所員を動
第 2 図 『歩きスマホ検知装置』
53
技術開発ニュース 2024.03/No.168
員し、歩きスマホをしている動画を撮影し、これを分割し
�
- ▲TOP
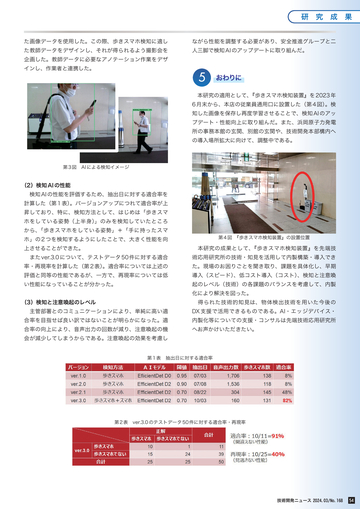
- ページ: 55
-
研 究 成 果
た画像データを使用した。この際、歩きスマホ検知に適し
ながら性能を調整する必要があり、安全推進グループと二
た教師データをデザインし、それが得られるよう撮影会を
人三脚で検知 AI のアップデートに取り組んだ。
企画した。教師データに必要なアノテーション作業をデザ
インし、作業者と連携した。
5
おわりに
本研究の適用として、『歩きスマホ検知装置』を 2023 年
6 月末から、本店の従業員通用口に設置した(第 4 図)。検
知した画像を保存し再度学習させることで、検知 AI のアッ
プデート・性能向上に取り組んだ。また、浜岡原子力発電
所の事務本館の玄関、別館の玄関や、技術開発本部構内へ
の導入場所拡大に向けて、調整中である。
第 3 図 AI による検知イメージ
(2)検知 AI の性能
検知 AI の性能を評価するため、抽出日に対する適合率を
計算した(第 1 表)。バージョンアップにつれて適合率が上
昇しており、特に、検知方法として、はじめは「歩きスマ
ホをしている姿勢(上半身)」のみを検知していたところ
から、
「歩きスマホをしている姿勢」+「手に持ったスマ
第 4 図 『歩きスマホ検知装置』の設置位置
ホ」の 2 つを検知するようにしたことで、大きく性能を向
上させることができた。
本研究の成果として、『歩きスマホ検知装置』を先端技
また ver.3.0 について、テストデータ 50 件に対する適合
術応用研究所の技術・知見を活用して内製構築・導入でき
率・再現率を計算した(第 2 表)。適合率については上述の
た。現場のお困りごとを聞き取り、課題を具体化し、早期
評価と同等の性能であるが、一方で、再現率については低
導入(スピード)、低コスト導入(コスト)、検知と注意喚
い性能になっていることが分かった。
起のレベル(技術)の各課題のバランスを考慮して、内製
化により解決を図った。
(3)検知と注意喚起のレベル
得られた技術的知見は、物体検出技術を用いた今後の
主管部署とのコミュニケーションにより、単純に高い適
DX 支援で活用できるものである。AI・エッジデバイス・
合率を目指せば良い訳ではないことが明らかになった。適
内製化等についての支援・コンサルは先端技術応用研究所
合率の向上により、音声出力の回数が減り、注意喚起の機
へお声かけいただきたい。
会が減少してしまうからである。注意喚起の効果を考慮し
第 1 表 抽出日に対する適合率
第 2 表 ver.3.0 のテストデータ 50 件に対する適合率・再現率
技術開発ニュース 2024.03/No.168
54
�
- ▲TOP
- ページ: 56
-
研 究 成 果
Results of Research Activities
AIを活用した水力発電計画策定支援システムの開発
AI-based system for planning hydropower generation
水系一貫で複数の水力発電所における発電計画の最適化を実現する
3 つの AI 技術
執筆者
再生可能エネルギーカンパニー
水力事業部
運用・システムグループ
中瀬 友之
川辺水力制御所
松尾 光徳
水系一貫での水力発電計画の最適化を目的とした、水力発電計画策定支援システムへ搭
載する各種 AI を開発した。AI は、(1) 流量予測 AI(2) 最適化計算 AI(3) 過去検索 AI の 3
つであり、これらを搭載する本システムの運用により発電計画の最適化に加え、計画策定
業務の効率化および技術継承にも寄与する。
1
背景
水力運用では、ダム流入量の予測を元に水資源を最大限
有効活用した最適な発電計画を策定することを目指してい
る。一方で、近年は線状降水帯やゲリラ豪雨が頻発し、国
主体で治水・利水を目的にダム運用自体の見直しが各地で
検討されており、今後水力発電にはさらなる運用の柔軟性
が強く求められると想定される。
加えて、従来の水系一貫での水力発電計画の策定業務
は、ベテラン社員のノウハウに頼ることが多く、その技術
継承も課題となっていた。
本検討では、当社管内で最も複雑な運用を行う飛騨川水
系を対象として、AI ソフトを用いて水系一貫での最適な発
電計画を提案する手法を確立した。これにより、発電量お
G
よび収入の増加を見込むことができるだけでなく、効率的
かつ今後の運用変化にも対応可能な柔軟性をもった発電計
A
画支援体制を構築することができる。現在、システム化の
B
工事期間中であり、
2024 年度中の運用開始を予定している。
C
D
2
水力発電計画策定支援システムの概要
第 1 図 飛騨川水系図
機械学習を採用しており、2019 ~ 2022 年度の各ダム集
水力発電計画策定支援システム(以下、本システム)
は、当社の中でも運用ルートが複雑な飛騨川水系(第 1 図
に示す)を対象に、(1) ダムへの流入量を予測する流入量
予測 AI、(2) ダムおよび発電所の運用制約を守りつつ 3 つ
の目的関数(発電量最大、売電金額最大、溢水量最小)が
最適となる発電計画を提案する最適化計算 AI、および (3)
翌日の諸条件に近い過去の日の計画を参照する過去検索
AI、の 3 つの AI ソフトを活用し、増電および増収を目指す
ものである。これらの AI を活用した発電計画策定フローを
第 2 図に示す。運用者は最適化計算 AI と過去検索 AI の結果
を参考に、翌日の発電計画を策定する。以下に各 AI につい
て説明する。
(1) 流入量予測 AI
発電計画の元データとなる各ダムへの流入量について、
第 1 図に記載する各ダムにおける流入量予測 AI(機械学習
アルゴリズム)を開発した。予測手法には教師データあり
55
技術開発ニュース 2024.03/No.168
第 2 図 AI 提案による発電計画策定フロー
�
- ▲TOP
- ページ: 57
-
研 究 成 果
水域の降雨実績に基づくデータおよび、流入量実績を学習
電所の条件が近い過去の日は少ない)ため、飛騨川上流の
教材とした。
貯水池運用の影響を大きく受ける上流グループと,馬瀬川
各ダム集水域はメッシュサイズ 5km で設定しており(第
からの合流が影響する下流グループに分けてそれぞれの条
3 図)、降水量の実績および予測値については、設定した
件に近い日を検索することとし、これにより各発電所の検
メッシュ内の値に変換して活用した。
索精度が向上した。第 6 図に検索例を示す。
ダム集水域
ダム集水域
ダム集水域
ダ
ダム地点
ダム地点
第 3 図 ダム集水域の設定例
降雨実績は流入量と相関が強い期間として対象時刻の 24
時間前までのデータも学習している。AI による流入量予測
第 6 図 過去検索 AI 提案例
結果の例を第 4 図に示す。平水時、洪水時ともに流入量実
最適化計算 AI と過去検索 AI はそれぞれ提案する計画に
績について日量および増減を再現することを確認できた。
特徴がある。前者は目的関数の最適化結果を提案するた
め、例えば高効率を求めダム水位を上限で推移させる計画
平水時
洪水時
流入量実績
流入量予測
等、運用者が運転・管理する上で、必ずしも運転しやすい
計画ではなく、実現性が低い計画となる可能性もある。一
方で、後者は実際に策定した過去の計画を提案するため、
第 4 図 流入量実績と流入量予測例
(2) 最適化計算 AI
本検討の目的が水系一貫での発電運用の最適化であるこ
運用者が心理的負担も含め運転しやすく実現性が高い計画
となる。
実際の発電計画は上述する各 AI が提案する計画の特徴を
踏まえ、運用者がそれに手を加えて策定する。
とから、増電および増収を対象発電所の合計で評価する必
要がある。最適化計算 AI では、関連するダムおよび発電
所の関係性を、ダム貯水上限、発電取水上下限、起動時刻
制約、河川での流下時間等の運用制約を前提に、ダム貯水
3
検討成果と今後の展開
量、予想流入量、発電取水量、ゲート放流量等のパラメー
本検討は 2021 年 4 月より検証を行ってきており、本シ
タを用いてモデル化し、最適化アルゴリズムにより対象発
ステム導入の効果として水系全体で年間 2% 程度の増電が
電所総合で前述の 3 つの目的関数をそれぞれ最適化する発
期待できることを確認した。また、発電計画の策定に要す
電計画を提案する。なお、予想流入量には流入量予測 AI の
る時間を従来の 4 分の 1 以下に削減し、業務の効率化を実
出力結果を用いる。第 5 図に売電金額最大を目的関数とし
現することに加え、これまで OJT が中心であった若手従業
て最適化計算 AI が提案した発電計画の例を示す。売電の高
員の教育について、本システムを用いたシミュレーション
価格帯で発電を盛上げる適切な計画を提案できていること
により短期間での技術習得が可能となる。
が確認できた。
今後、流入量予測 AI については運用の中で予測精度を監
視していき、学習データの更新等により性能維持および向
上を図っていく。また、過去検索 AI については検索対象と
なる発電計画データを蓄積していき、検索精度向上を図っ
ていく。
第 5 図 最適化計算 AI 提案例
(3) 過去検索 AI
現在、当社管内の他水系への展開も検討・検証中であ
り、全社でのさらなる水力発電の増電および増収を目指す。
また、長期雨量予測を用いた週間発電計画の最適化も検
翌日の各ダム水位や、貯水計画に基づく使用可能水量等
討している。本システムでは日単位での最適化を目的とし
の諸条件を元に、検索アルゴリズムにより過去に類似の条
たが、週間単位で貯水池運用の最適化を図ることで、溢水
件であった日の水系全体の発電計画を過去データから検索
の削減と、より需給ニーズに沿った発電計画の提案が可能
する AI を開発した。検討の中で、対象発電所全ての条件が
となる。
近似する日を検索しようとすると検索精度が下がる(全発
技術開発ニュース 2024.03/No.168
56
�
- ▲TOP
- ページ: 58
-
研 究 成 果
Results of Research Activities
自然エネルギーを利用した小型独立電源装置の
開発・実証
A small independent power supply that uses natural energy
風と太陽によるハイブリッドエネルギーで山間部でも
IoT 機器へ電力安定供給
執筆者
山間部における IoT ネットワークの構築では、LPWA 無線機などの IoT 機器への安定
的な電源供給が課題であり、それを解決するため、エコ ・ テクノロジー社と共同で、自然
エネルギーを利用した小型独立電源装置を試作開発し、現場での実証検証を行った。
1
先端技術応用研究所
情報技術グループ
内山 功次
目的
中部電力パワーグリッドにおいて、山間部で LPWA ネッ
トワークを構築し、IoT サービスに向けた実証実験が行わ
れた。実用化の課題の一つに送電鉄塔上に設置する LPWA
無線機など IoT 機器への安定的な電源供給がある。
そこで、先端技術応用研究所とエコ ・ テクノロジーは、
風力と太陽光の自然エネルギーを利用した小型独立電源装
置(以下、ハイブリッド電源装置)を開発した。
2
ハイブリッド電源装置の開発
ハイブリッド電源装置は、風力羽根に太陽光パネルを張
り付けた世界初のソーラーブレード方式という特徴を持
つ。山間部において、太陽光発電だけでは山影や積雪など
第 2 図 鉄塔に設置したハイブリッド電源装置写真
3
まとめ
で発電効率が低いため、昼夜問わず発電できる風力発電を
太陽光発電は日中、晴れた日でないと発電できないた
組み合わせたハイブリッド発電方式を採用した。この風力
め、安定性に欠けるが、風力発電は風さえ吹けば一日中発
羽根は特許技術の形状により、台風や突風でもカットアウ
電が可能である。これら二つを組み合わせたハイブリッド
トがなく、騒音や振動も少ない。悪天候(無日照無風)が
電源装置は、電源の確保が困難な場所に設置する IoT 機器
3 日間続いても、1 ワット級の IoT 機器への電源供給が可
へ、安定して電力を供給することが可能である。一方で、
能である。また、小型 ・ 軽量(重さ 12.6kg、高さ 50cm)
送電鉄塔への設置には大きさなどの制約があるため、実用
で、パーツ分割できることから、送電鉄塔などの高所への
化には発電効率や施工性などに関して検討しなければなら
取付作業も容易である。静岡県大井川の山間部にある送電
ないことも多いことが分かった。
鉄塔に実際に取り付け、越冬実証実験を行い、安定稼働を
確認した。
LPWA
第 1 図 ハイブリッド電源装置概要図
57
技術開発ニュース 2024.03/No.168
第 3 図 ハイブリッド電源装置の適用イメージ図
�
- ▲TOP
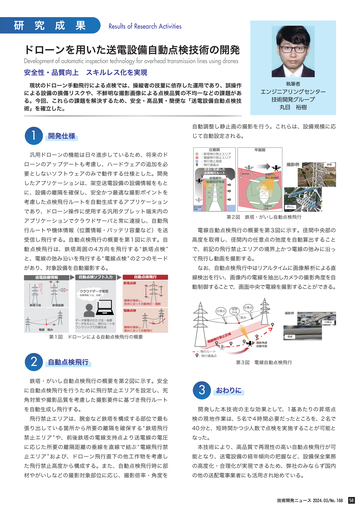
- ページ: 59
-
研 究 成 果
研 究 成 果
Results of Research Activities
ドローンを用いた送電設備自動点検技術の開発
Development of automatic inspection technology for overhead transmission lines using drones
安全性・品質向上 スキルレス化を実現
現状のドローン手動飛行による点検では、操縦者の技量に依存した運用であり、誤操作
による設備の損傷リスクや、不鮮明な撮影画像による点検品質の不均一などの課題があ
る。今回、これらの課題を解決するため、安全・高品質・簡便な「送電設備自動点検技
術」を確立した。
1
執筆者
エンジニアリングセンター
技術開発グループ
丸目 裕樹
自動調整し静止画の撮影を行う。これらは、設備規模に応
開発仕様
じて自動設定される。
汎用ドローンの機能は日々進歩しているため、将来のド
ローンのアップデートも考慮し、ハードウェアの追加を必
要としないソフトウェアのみで動作する仕様とした。開発
したアプリケーションは、架空送電設備の設備情報をもと
に、設備の離隔を確保し、安全かつ最適な撮影ポイントを
考慮した点検飛行ルートを自動生成するアプリケーション
であり、ドローン操作に使用する汎用タブレット端末内の
第 2 図 鉄塔・がいし自動点検飛行
アプリケーションでクラウドサーバと常に連接し、自動飛
行ルートや機体情報(位置情報・バッテリ容量など)を送
電線自動点検飛行の概要を第 3 図に示す。径間中央部の
受信し飛行する。自動点検飛行の概要を第 1 図に示す。自
高度を取得し、径間内の任意点の弛度を自動算出すること
動点検飛行は、鉄塔周囲の 4 方向を飛行する “ 鉄塔点検 ”
で、前記の飛行禁止エリアの境界上かつ電線の弛みに沿っ
と、電線の弛み沿いを飛行する “ 電線点検 ” の 2 つのモード
て飛行し動画を撮影する。
があり、対象設備を自動撮影する。
なお、自動点検飛行中はリアルタイムに画像解析による直
線検出を行い、画像内の電線を抽出しカメラの撮影角度を自
動制御することで、画面中央で電線を撮影することができる。
(
)
第 1 図 ドローンによる自動点検飛行の概要
2
自動点検飛行
鉄塔・がいし自動点検飛行の概要を第 2 図に示す。安全
に自動点検飛行を行うために飛行禁止エリアを設定し、死
角対策や撮影品質を考慮した撮影要件に基づき飛行ルート
第 3 図 電線自動点検飛行
3
おわりに
を自動生成し飛行する。
開発した本技術の主な効果として、1基あたりの昇塔点
飛行禁止エリアは、腕金など鉄塔を構成する部位で最も
検の現地作業は、5 名で4 時間必要だったところを、2 名で
張り出している箇所から所要の離隔を確保する “ 鉄塔飛行
40 分と、短時間かつ少人数で点検を実施することが可能と
禁止エリア ” や、前後鉄塔の電線支持点より送電線の電圧
なった。
に応じた所要の離隔距離の垂線を直線で結ぶ “ 電線飛行禁
本技術により、高品質で再現性の高い自動点検飛行が可
止エリア ” および、ドローン飛行直下の他工作物を考慮し
能となり、送電設備の経年傾向の把握など、設備保全業務
た飛行禁止高度から構成する。また、自動点検飛行時に部
の高度化・合理化が実現できるため、弊社のみならず国内
材やがいしなどの撮影対象部位に応じ、撮影倍率・角度を
の他の送配電事業者にも活用され始めている。
技術開発ニュース 2024.03/No.168
58
�
- ▲TOP
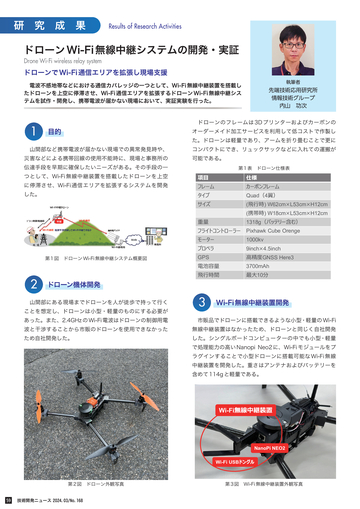
- ページ: 60
-
研 究 成 果
Results of Research Activities
ドローン Wi-Fi 無線中継システムの開発・実証
Drone Wi-Fi wireless relay system
ドローンで Wi-Fi 通信エリアを拡張し現場支援
執筆者
電波不感地帯などにおける通信カバレッジの一つとして、Wi-Fi 無線中継装置を搭載し
たドローンを上空に停滞させ、Wi-Fi 通信エリアを拡張するドローン Wi-Fi 無線中継シス
テムを試作・開発し、携帯電波が届かない現場において、実証実験を行った。
1
先端技術応用研究所
情報技術グループ
内山 功次
ドローンのフレームは 3D プリンターおよびカーボンの
目的
オーダーメイド加工サービスを利用して低コストで作製し
た。ドローンは軽量であり、アームを折り畳むことで更に
山間部など携帯電波が届かない現場での異常発見時や、
コンパクトにでき、リュックサックなどに入れての運搬が
災害などによる携帯回線の使用不能時に、現場と事務所の
可能である。
伝達手段を早期に確保したいニーズがある。その手段の一
第 1 表 ドローン仕様表
つとして、Wi-Fi 無線中継装置を搭載したドローンを上空
に停滞させ、Wi-Fi 通信エリアを拡張するシステムを開発
した。
Quad 4
(
) W62cm×L53cm×H12cm
(
) W18cm×L53cm×H12cm
1318g
Pixhawk Cube Orenge
1000kv
9inch×4.5inch
第 1 図 ドローン Wi-Fi 無線中継システム概要図
GPS
GNSS Here3
3700mAh
2
10
ドローン機体開発
山間部にある現場までドローンを人が徒歩で持って行く
ことを想定し、ドローンは小型・軽量のものにする必要が
3
Wi-Fi 無線中継装置開発
あった。また、2.4GHz の Wi-Fi 電波はドローンの制御用電
市販品でドローンに搭載できるような小型 ・ 軽量の Wi-Fi
波と干渉することから市販のドローンを使用できなかった
無線中継装置はなかったため、ドローンと同じく自社開発
ため自社開発した。
した。シングルボードコンピューターの中でも小型 ・ 軽量
で処理能力の高い Nanopi Neo2 に、Wi-Fi モジュールをプ
ラグインすることで小型ドローンに搭載可能な Wi-Fi 無線
中継装置を開発した。重さはアンテナおよびバッテリーを
含めて 114g と軽量である。
Wi-Fi
NanoPi NEO2
Wi-Fi USB
第 2 図 ドローン外観写真
59
技術開発ニュース 2024.03/No.168
第 3 図 Wi-Fi 無線中継装置外観写真
�
- ▲TOP
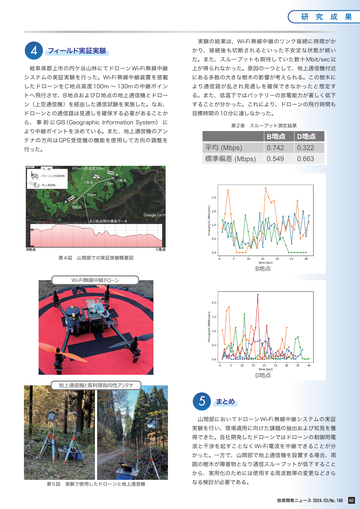
- ページ: 61
-
研 究 成 果
4
フィールド実証実験
実験の結果は、Wi-Fi 無線中継のリンク接続に時間がか
かり、接続後も切断されるといった不安定な状態が続い
た。また、スループットも期待していた数十 Mbit/sec 以
岐阜県郡上市の内ケ谷山林にてドローン Wi-Fi 無線中継
上が得られなかった。原因の一つとして、地上通信機付近
システムの実証実験を行った。Wi-Fi 無線中継装置を搭載
にある多数の大きな樹木の影響が考えられる。この樹木に
したドローンを C 地点高度 100m ~ 130m の中継ポイン
より通信路が乱され見通しを確保できなかったと想定す
トへ飛行させ、B 地点および D 地点の地上通信機とドロー
る。また、低温下ではバッテリーの放電能力が著しく低下
ン(上空通信機)を経由した通信試験を実施した。なお、
することが分かった。これにより、ドローンの飛行時間も
ドローンとの通信路は見通しを確保する必要があることか
目標時間の 10 分に達しなかった。
ら、 事 前 に GIS(Geographic Information System) に
第 2 表 スループット測定結果
より中継ポイントを決めている。また、地上通信機のアン
テナの方向は GPS 受信機の機能を使用して方向の調整を
(Mbps)
行った。
(Mbps)
(
B
D
0.742
0.322
0.549
0.663
)
第 4 図 山間部での実証実験概要図
B
Wi-Fi
D
5
まとめ
山間部においてドローン Wi-Fi 無線中継システムの実証
実験を行い、現場適用に向けた課題の抽出および知見を獲
得できた。自社開発したドローンではドローンの制御用電
波と干渉を起すことなく Wi-Fi 電波を中継できることが分
かった。一方で、山間部で地上通信機を設置する場合、周
囲の樹木が障害物となり通信スループットが低下すること
から、実用化のためには使用する周波数帯の変更などさら
第 5 図 実験で使用したドローンと地上通信機
なる検討が必要である。
技術開発ニュース 2024.03/No.168
60
�
- ▲TOP
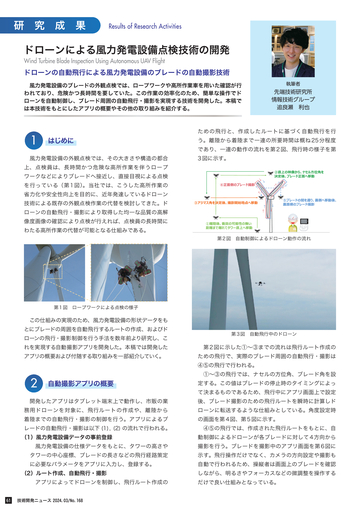
- ページ: 62
-
研 究 成 果
Results of Research Activities
ドローンによる風力発電設備点検技術の開発
Wind Turbine Blade Inspection Using Autonomous UAV Flight
ドローンの自動飛行による風力発電設備のブレードの自動撮影技術
風力発電設備のブレードの外観点検では、ロープワークや高所作業車を用いた確認が行
われており、危険かつ長時間を要していた。この作業の効率化のため、簡単な操作でド
ローンを自動制御し、ブレード周囲の自動飛行・撮影を実現する技術を開発した。本稿で
は本技術をもとにしたアプリの概要やその他の取り組みを紹介する。
1
はじめに
風力発電設備の外観点検では、その大きさや構造の都合
執筆者
先端技術研究所
情報技術グループ
追良瀬 利也
ための飛行と、作成したルートに基づく自動飛行を行
う。離陸から着陸まで一連の所要時間は概ね 25 分程度
であり、一連の動作の流れを第 2 図、飛行時の様子を第
3 図に示す。
上、点検員は、長時間かつ危険な高所作業を伴うロープ
ワークなどによりブレードへ接近し、直接目視による点検
を行っている(第 1 図)。当社では、こうした高所作業の
省力化や安全性向上を目的に、近年発達しているドローン
技術による既存の外観点検作業の代替を検討してきた。ド
ローンの自動飛行・撮影により取得した均一な品質の高解
像度画像の確認により点検が行えれば、点検員の長時間に
わたる高所作業の代替が可能となる仕組みである。
第 2 図 自動制御によるドローン動作の流れ
第 1 図 ロープワークによる点検の様子
この仕組みの実現のため、風力発電設備の形状データをも
とにブレードの周囲を自動飛行するルートの作成、およびド
ローンの飛行・撮影制御を行う手法を数年前より研究し、こ
第 3 図 自動飛行中のドローン
れを実現する自動撮影アプリを開発した。本稿では開発した
第 2 図に示した①~③までの流れは飛行ルート作成の
アプリの概要および付随する取り組みを一部紹介していく。
ための飛行で、実際のブレード周囲の自動飛行・撮影は
④⑤の飛行で行われる。
2
自動撮影アプリの概要
定する。この値はブレードの停止時のタイミングによっ
て決まるものであるため、飛行中にアプリ画面上で設定
開発したアプリはタブレット端末上で動作し、市販の業
後、ブレード撮影のための飛行ルートを瞬時に計算しド
務用ドローンを対象に、飛行ルートの作成や、離陸から
ローンに転送するような仕組みとしている。角度設定時
着陸までの自動飛行・撮影の制御を行う。アプリによるブ
の画面を第 4 図、第 5 図に示す。
レードの自動飛行・撮影は以下 (1), (2) の流れで行われる。
④⑤の飛行では、作成された飛行ルートをもとに、自
(1)風力発電設備データの事前登録
動制御によるドローンが各ブレードに対して 4 方向から
風力発電設備の仕様データをもとに、タワーの高さや
撮影を行う。ブレードを撮影中のアプリ画面を第 6 図に
タワーの中心座標、ブレードの長さなどの飛行経路策定
示す。飛行操作だけでなく、カメラの方向設定や撮影も
に必要なパラメータをアプリに入力し、登録する。
自動で行われるため、操縦者は画面上のブレードを確認
(2)ルート作成、自動飛行・撮影
アプリによってドローンを制御し、飛行ルート作成の
61
①~③の飛行では、ナセルの方位角、ブレード角を設
技術開発ニュース 2024.03/No.168
しながら、明るさやフォーカスなどの微調整を操作する
だけで良い仕組みとなっている。
�
- ▲TOP
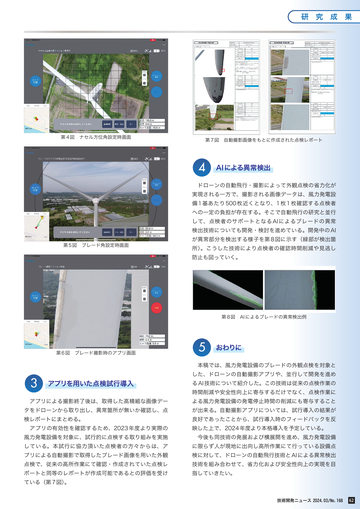
- ページ: 63
-
研 究 成 果
第 4 図 ナセル方位角設定時画面
第 7 図 自動撮影画像をもとに作成された点検レポート
4
AI による異常検出
ドローンの自動飛行・撮影によって外観点検の省力化が
実現される一方で、撮影される画像データは、風力発電設
備 1 基あたり 500 枚近くとなり、1 枚 1 枚確認する点検者
への一定の負担が存在する。そこで自動飛行の研究と並行
して、点検者のサポートとなる AI によるブレードの異常
検出技術についても開発・検討を進めている。開発中の AI
第 5 図 ブレード角設定時画面
が異常部分を検出する様子を第 8 図に示す(緑部が検出箇
所)。こうした技術により点検者の確認時間削減や見逃し
防止も図っていく。
第 8 図 AI によるブレードの異常検出例
第 6 図 ブレード撮影時のアプリ画面
5
おわりに
本稿では、風力発電設備のブレードの外観点検を対象と
3
アプリを用いた点検試行導入
した、ドローンの自動撮影アプリや、並行して開発を進め
る AI 技術について紹介した。この技術は従来の点検作業の
時間削減や安全性向上に寄与するだけでなく、点検作業に
アプリによる撮影終了後は、取得した高精細な画像デー
よる風力発電設備の発電停止時間の削減にも寄与すること
タをドローンから取り出し、異常箇所が無いか確認し、点
が出来る。自動撮影アプリについては、試行導入の結果が
検レポートにまとめる。
良好であったことから、試行導入時のフィードバックを反
アプリの有効性を確認するため、2023 年度より実際の
映した上で、2024 年度より本格導入を予定している。
風力発電設備を対象に、試行的に点検する取り組みを実施
今後も同技術の発展および横展開を進め、風力発電設備
している。本試行に協力頂いた点検者の方々からは、ア
に限らず人が現地に出向し高所作業にて行っている設備点
プリによる自動撮影で取得したブレード画像を用いた外観
検に対して、ドローンの自動飛行技術と AI による異常検出
点検で、従来の高所作業にて確認・作成されていた点検レ
技術を組み合わせて、省力化および安全性向上の実現を目
ポートと同等のレポートが作成可能であるとの評価を受け
指していきたい。
ている(第 7 図)。
技術開発ニュース 2024.03/No.168
62
�
- ▲TOP
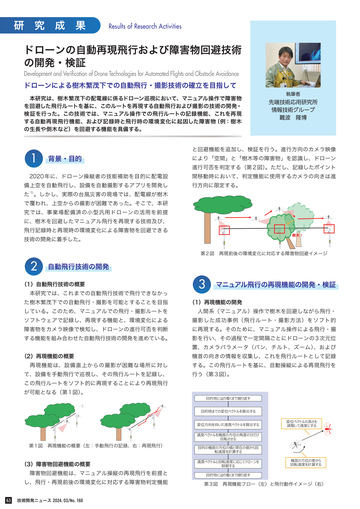
- ページ: 64
-
研 究 成 果
Results of Research Activities
ドローンの自動再現飛行および障害物回避技術
の開発・検証
Development and Verification of Drone Technologies for Automated Flights and Obstacle Avoidance
ドローンによる樹木繁茂下での自動飛行・撮影技術の確立を目指して
本研究は、樹木繁茂下の配電線に係るドローン巡視において、マニュアル操作で障害物
を回避した飛行ルートを基に、このルートを再現する自動飛行および撮影の技術の開発・
検証を行った。この技術では、マニュアル操作での飛行ルートの記録機能、これを再現
する自動再現飛行機能、および記録時と飛行時の環境変化に起因した障害物(例:樹木
の生長や倒木など)を回避する機能を具備する。
1
背景・目的
執筆者
先端技術応用研究所
情報技術グループ
難波 隆博
と回避機能を追加し、検証を行う。進行方向のカメラ映像
により「空間」と「樹木等の障害物」を認識し、ドローン
進行可否を判定する(第 2 図)。ただし、記録したポイント
2020 年に、ドローン操縦者の技能補助を目的に配電設
間移動時において、判定機能に使用するカメラの向きは進
備上空を自動飛行し、設備を自動撮影するアプリを開発し
行方向に限定する。
た 。しかし、実際の台風災害の現場では、配電線が樹木
1)
で覆われ、上空からの撮影が困難であった。そこで、本研
究では、事業場配備済の小型汎用ドローンの活用を前提
に、樹木を回避したマニュアル飛行を再現する技術及び、
飛行記録時と再現時の環境変化による障害物を回避できる
技術の開発に着手した。
第 2 図 再現前後の環境変化に対応する障害物回避イメージ
2
自動飛行技術の開発
(1)自動飛行技術の概要
本研究では、これまでの自動飛行技術で飛行できなかっ
た樹木繁茂下での自動飛行・撮影を可能とすることを目指
している。このため、マニュアルでの飛行・撮影ルートを
3
マニュアル飛行の再現機能の開発・検証
(1)再現機能の開発
人間系(マニュアル)操作で樹木を回避しながら飛行・
ソフトウェアで記録し、再現する機能と、環境変化による
撮影した成功事例(飛行ルート・撮影方法)をソフト的
障害物をカメラ映像で検知し、ドローンの進行可否を判断
に再現する。そのために、マニュアル操作による飛行・撮
する機能を組み合わせた自動飛行技術の開発を進めている。
影を行い、その過程で一定間隔ごとにドローンの 3 次元位
(2)再現機能の概要
置、カメラパラメータ(パン、チルト、ズーム)、および
機首の向きの情報を収集し、これを飛行ルートとして記録
再現機能は、設備直上からの撮影が困難な場所に対し
する。この飛行ルートを基に、自動操縦による再現飛行を
て、設備を手動飛行で巡視し、その飛行ルートを記録し、
行う(第 3 図)。
この飛行ルートをソフト的に再現することにより再現飛行
が可能となる(第 1 図)。
第 1 図 再現機能の概要(左:手動飛行の記録、右:再現飛行)
(3)障害物回避機能の概要
障害物回避機能は、マニュアル操縦の再現飛行を前提と
し、飛行・再現前後の環境変化に対応する障害物判定機能
63
技術開発ニュース 2024.03/No.168
第 3 図 再現機能フロー(左)と飛行動作イメージ(右)
�
- ▲TOP
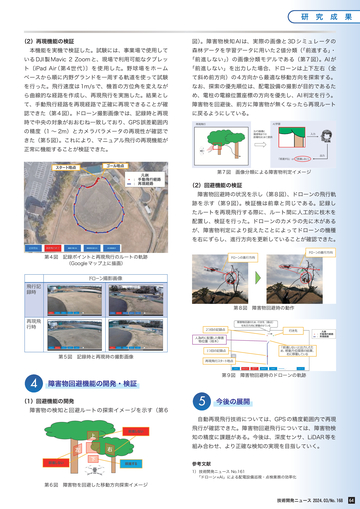
- ページ: 65
-
研 究 成 果
(2)再現機能の検証
図)。障害物検知 AI は、実際の画像と 3D シミュレータの
本機能を実機で検証した。試験には、事業場で使用して
森林データを学習データに用いた 2 値分類(「前進する」・
いる DJI 製 Mavic 2 Zoom と、現場で利用可能なタブレッ
「前進しない」)の画像分類モデルである(第 7 図)。AI が
ト〔iPad Air( 第 4 世代)〕を使用した。野球場をホーム
「前進しない」を出力した場合、ドローンは上下左右(全
ベースから順に内野グランドを一周する軌道を使って試験
て斜め前方向)の 4 方向から最適な移動方向を探索する。
を行った。飛行速度は 1m/s で、機首の方位角を変えなが
なお、探索の優先順位は、配電設備の撮影が目的であるた
ら曲線的な経路を作成し、再現飛行を実施した。結果とし
め、電柱の電線位置座標の方向を優先し、AI 判定を行う。
て、手動飛行経路を再現経路で正確に再現できることが確
障害物を回避後、前方に障害物が無くなったら再現ルート
認できた(第 4 図)。ドローン撮影画像では、記録時と再現
に戻るようにしている。
時で中央の対象がおおむね一致しており、GPS 誤差範囲内
AI
の精度(1 ~ 2m)とカメラパラメータの再現性が確認で
きた(第 5 図)。これにより、マニュアル飛行の再現機能が
正常に機能することが検証できた。
or
第 7 図 画像分類による障害物判定イメージ
(2)回避機能の検証
障害物回避時の状況を示し(第 8 図)、ドローンの飛行軌
跡を示す(第 9 図)。検証機は前章と同じである。記録し
たルートを再現飛行する際に、ルート間に人工的に枝木を
配置し、検証を行った。ドローンのカメラの先に木がある
が、障害物判定により捉えたことによってドローンの機種
を右にずらし、進行方向を更新していることが確認できた。
第 4 図 記録ポイントと再現飛行のルートの軌跡
(Google マップ上に描画)
第 8 図 障害物回避時の動作
2
1
第 5 図 記録時と再現時の撮影画像
4
第 9 図 障害物回避時のドローンの軌跡
障害物回避機能の開発・検証
(1)回避機能の開発
障害物の検知と回避ルートの探索イメージを示す(第 6
5
今後の展開
自動再現飛行技術については、GPS の精度範囲内で再現
飛行が確認できた。障害物回避飛行については、障害物検
知の精度に課題がある。今後は、深度センサ、LiDAR 等を
組み合わせ、より正確な検知の実現を目指していく。
参考文献
1) 技術開発ニュース No.161
「ドローン ×AI」による配電設備巡視・点検業務の効率化
第 6 図 障害物を回避した移動方向探索イメージ
技術開発ニュース 2024.03/No.168
64
�
- ▲TOP
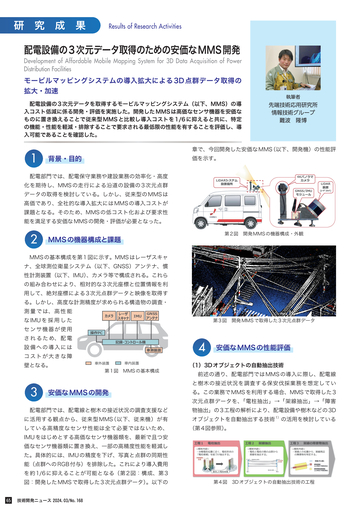
- ページ: 66
-
研 究 成 果
Results of Research Activities
配電設備の3 次元データ取得のための安価なMMS開発
Development of Affordable Mobile Mapping System for 3D Data Acquisition of Power
Distribution Facilities
モービルマッピングシステムの導入拡大による 3D 点群データ取得の
拡大・加速
執筆者
配電設備の 3 次元データを取得するモービルマッピングシステム(以下、MMS)の導
入コスト低減に係る開発・評価を実施した。開発した MMS は高価なセンサ機器を安価な
ものに置き換えることで従来型 MMS と比較し導入コストを 1/6 に抑えると共に、特定
の機能・性能を軽減・排除することで要求される最低限の性能を有することを評価し、導
入可能であることを確認した。
1
先端技術応用研究所
情報技術グループ
難波 隆博
章で、今回開発した安価な MMS(以下、開発機)の性能評
背景・目的
価を示す。
配電部門では、配電保守業務や建設業務の効率化・高度
4K
LiDAR
化を期待し、MMS の走行による沿道の設備の 3 次元点群
LiDAR
GNSS/IMU
データの取得を検討している。しかし、従来型の MMS は
(
)
高価であり、全社的な導入拡大には MMS の導入コストが
課題となる。そのため、MMS の低コスト化および要求性
能を満足する安価な MMS の開発・評価が必要となった。
2
第 2 図 開発 MMS の機器構成・外観
MMS の機器構成と課題
MMS の基本構成を第 1 図に示す。MMS はレーザスキャ
ナ、全球測位衛星システム(以下、GNSS)アンテナ、慣
性計測装置(以下、IMU)、カメラ等で構成される。これら
の組み合わせにより、相対的な 3 次元座標と位置情報を利
用して、絶対座標による 3 次元点群データと映像を取得す
る。しかし、高度な計測精度が求められる構造物の調査・
測 量 で は、 高 性 能
IMU
な IMU を 採 用 し た
センサ機器が使用
さ れ る た め、 配 電
GNSS
第 3 図 開発 MMS で取得した 3 次元点群データ
PC
4
設備への導入には
コストが大きな障
壁となる。
3
第 1 図 MMS の基本構成
安価な MMS の開発
安価な MMS の性能評価
(1)3D オブジェクトの自動抽出技術
前述の通り、配電部門では MMS の導入に際し、配電線
と樹木の接近状況を調査する保安伐採業務を想定してい
る。この業務で MMS を利用する場合、MMS で取得した 3
次元点群データを、
「電柱抽出」→「架線抽出」→「障害
配電部門では、配電線と樹木の接近状況の調査支援など
物抽出」の 3 工程の解析により、配電設備や樹木などの 3D
に活用する観点から、従来型 MMS(以下、従来機)が有
オブジェクトを自動抽出する技術 1)の活用を検討している
している高精度なセンサ性能は全て必要ではないため、
(第 4 図参照)。
IMU をはじめとする高価なセンサ機器類を、最新で且つ安
価なセンサ機器類に置き換え、一部の高精度性能を軽減し
た。具体的には、IMU の精度を下げ、写真と点群の同期性
<
>
<
>
<
>
能(点群への RGB 付与)を排除した。これにより導入費用
を約 1/6 に抑えることが可能となる(第 2 図:構成、第 3
図:開発した MMS で取得した 3 次元点群データ)。以下の
65
技術開発ニュース 2024.03/No.168
第 4 図 3D オブジェクトの自動抽出技術の工程
�
- ▲TOP
- ページ: 67
-
研 究 成 果
(2)開発 MMS の机上性能評価
従来機が 4 月の撮影データであるのに対し、開発機は 6
前述した技術の各オブジェクトの抽出精度への主な影響
月の撮影データであり、樹木の成長により、架線の点群
要素は、「電柱抽出」では点群データの絶対位置精度が重
取得が困難になったことが主な原因と考える(第 6 図参
要であり、「電線抽出」では取得したデータの粒度が重要
照)。このため、撮影時期の違いを考慮すると、同等の
となる。これらの要素に関して、MMS 機器性能との関連
取得が可能と考えられる。
性を整理し、過去の研究で検証済の従来機と、本研究の開
発機の比較性能評価を第 1 表に示す。IMU 性能と点群相対
精度は劣るものの、取得可能な GNSS 数や点群密度につい
ては優れていることが分かる。
第 1 表 抽出精度要因で整理した開発機の比較性能評価
第 6 図 4 月・6 月の違いによる植生の変化例(井川地区)
(
GNSS
(
IMU
3
)
Heading 0.03°
Roll/Pitch 0.015°
RTK-GNSS
70
4
6
(
ウ 障害物との最接近離隔距離計測・評価
)
二機種の MMS にて、電柱および架線抽出が実施でき
Heading 0.15°
Roll/Pitch 0.02°
(
/
ichimill
)
/
結果例を第 7 図に示す。双方、同一の障害物(樹木)が
±5cm
最接近離隔の対象であることが分かる。距離の値が若干
120
±2cm
た箇所について、配電線と樹木の最接近離隔の自動計測
RTK-GNSS
ichimill
異なるが計測時期(4 月と 6 月)による植生の影響と考
(3)開発 MMS の現場検証による性能評価
えられる。
ア 検証走行ルート
従来機と開発機の性能
MMS
を比較評価するため、現
場での検証を行った。具
(2022 4 )
MMS
(2022 6 )
0.58m
0.33m
0.54m
0.30m
25 982
体的には、第 5 図に示す
静岡市内の都市部、郊外
25 981
地域、山間部の各ルート
でそれぞれ走行し、点群
データの取得を行った。
26 881
SBS
第 5 図 MMS 検証の走行ルート
26 882
第 7 図 障害物との最接近離隔距離計測結果
イ 電柱および架線の自動抽出率
二機種の MMS で走行した地域での電柱および架線
(高圧配電線)の自動抽出率をそれぞれ、第 2 表と第 3
表に示す。都市部・郊外では、電柱の抽出率では従来機
(4)検証結果
今回開発した安価な MMS は配電部門の伐採調査業務に
が開発機よりも約 10% 高い精度を示し、一方、電線の
おいて、導入可能な性能であることを現場での検証により
抽出率では開発機が従来機よりも約 10% 高い精度を示
確認した。
している。ただし、山間部の電線抽出率については従来
機の方が約 10% 高い精度を有している。この違いは、
第 2 表 二機種の電柱抽出率 [ 左:都市部・郊外地、右:山間部 ]
299
294
294
98.3% 262
87.6%
246
243
81.3% 212
70.9%
104
83.7%
35.4%
243
1
106
82.7%
36.1%
1
51
17.1%
50
16.7%
142
48.3%
137
46.6%
5
1.7%
37
12.4%
48
16.3%
51
17.3%
第 3 表 二機種の架線抽出率 [ 左:都市部・郊外地、右:山間部 ]
138
68.8%
99
56.3%
9
6.5%
11
8.0%
1
25
14.2%
28
15.9%
2
12
17.1%
3
2.2%
2
5
2.8%
17
9.7%
3
32
8.7%
22
15.9%
3
25
14.2%
32
18.0%
6
0
0%
2
1.4%
85
今後の展開
今後も、安価な MMS による 3 次元点群データ取得を通
じて電力業務の効率化を目指していく。その過程で、性能
軽減の結果と効果を適宜検証・評価していく 。
参考文献
1) 技術開発ニュース No.163
3 次元点群データを活用した保安伐採業務の支援技術
176
121
1
2
5
61.6% 100
72.5%
2
技術開発ニュース 2024.03/No.168
66
�
- ▲TOP
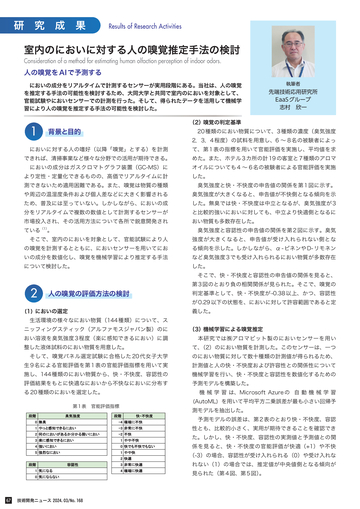
- ページ: 68
-
研 究 成 果
Results of Research Activities
室内のにおいに対する人の嗅覚推定手法の検討
Consideration of a method for estimating human olfaction perception of indoor odors.
人の嗅覚を AI で予測する
においの成分をリアルタイムで計測するセンサーが実用段階にある。当社は、人の嗅覚
を推定する手法の可能性を検討するため、大同大学と共同で室内のにおいを対象として、
官能試験やにおいセンサーでの計測を行った。そして、得られたデータを活用して機械学
習により人の嗅覚を推定する手法の可能性を検討した。
執筆者
先端技術応用研究所
EaaS グループ
志村 欣一
1
(2)嗅覚の判定基準
背景と目的
20 種類のにおい物質について、3 種類の濃度(臭気強度
2,3,4 程度)の試料を用意し、6 ~ 8 名の被験者によっ
においに対する人の嗜好(以降「嗅覚」とする)を計測
て、第 1 表の指標を用いて官能評価を実施し、平均値を求
できれば、清掃事業など様々な分野での活用が期待できる。
めた。また、ホテル 3 カ所の計 19 の客室と 7 種類のアロマ
においの成分はガスクロマトグラフ装置(GC-MS)に
オイルについても 4 ~ 6 名の被験者による官能評価を実施
より定性・定量化できるものの、高価でリアルタイムに計
した。
測できないため適用困難である。また、嗅覚は物質の種類
臭気強度と快・不快度の申告値の関係を第 1 図に示す。
や周辺の温湿度条件および個人差などに大きく影響される
臭気強度が大きくなると、申告値が不快側となる傾向を示
ため、普及には至っていない。しかしながら、においの成
した。無臭では快・不快度は中立となるが、臭気強度が 3
分をリアルタイムで複数の数値として計測するセンサーが
と比較的強いにおいに対しても、中立より快適側となるに
市場投入され、その活用方法について各所で鋭意開発され
おい物質も多数存在した。
ている
。
臭気強度と容認性の申告値の関係を第 2 図に示す。臭気
(1)
そこで、室内のにおいを対象として、官能試験により人
強度が大きくなると、申告値が受け入れられない側とな
の嗅覚を計測するとともに、においセンサーを用いてにお
る傾向を示した。しかしながら、α - ピネンや D- リモネン
いの成分を数値化し、嗅覚を機械学習により推定する手法
など臭気強度 3 でも受け入れられるにおい物質が多数存在
について検討した。
した。
そこで、快・不快度と容認性の申告値の関係を見ると、
2
人の嗅覚の評価方法の検討
(1) においの選定
第 3 図のとおり負の相関関係が見られた。そこで、嗅覚の
判定基準として、快・不快度が -0.38 以上、かつ、容認性
が 0.29 以下の状態を、においに対して許容範囲であると定
義した。
生活環境の様々なにおい物質(144 種類)について、ス
ニッフィングスティック(アルファモスジャパン製)のに
おい溶液を臭気強度 3 程度(楽に感知できるにおい)に調
本研究では㈱アロマビット製のにおいセンサーを用い
整した液体試料のにおい物質を用意した。
て、(2)のにおい物質を計測した。このセンサーは、一つ
そして、嗅覚パネル選定試験に合格した 20 代女子大学
のにおい物質に対して数十種類の計測値が得られるため、
生 9 名による官能評価を第 1 表の官能評価指標を用いて実
計測値と人の快・不快度および許容性との関係性について
施し、144 種類のにおい物質から、快・不快度、容認性の
機械学習を行い、快・不快度と容認性を数値化するための
評価結果をもとに快適なにおいから不快なにおいに分布す
予測モデルを構築した。
る 20 種類のにおいを選定した。
機 械 学 習 は、Microsoft Azure の 自 動 機 械 学 習
(AutoML) を用いて平均平方二乗誤差が最も小さい回帰予
第 1 表 官能評価指標
測モデルを抽出した。
0
-4
1
-3
2
-2
3
1
4
0
5
1
2
3
1
0
67
(3)機械学習による嗅覚推定
技術開発ニュース 2024.03/No.168
4
予測モデルの誤差は、第 2 表のとおり快・不快度、容認
性とも、比較的小さく、実用が期待できることを確認でき
た。しかし、快・不快度、容認性の実測値と予測値との関
係を見ると、快・不快度の官能評価が快適(+1)や不快
(-3)の場合、容認性が受け入れられる(0)や受け入れな
れない(1)の場合では、推定値が中央値側となる傾向が
見られた(第 4 図、第 5 図)。
�
- ▲TOP
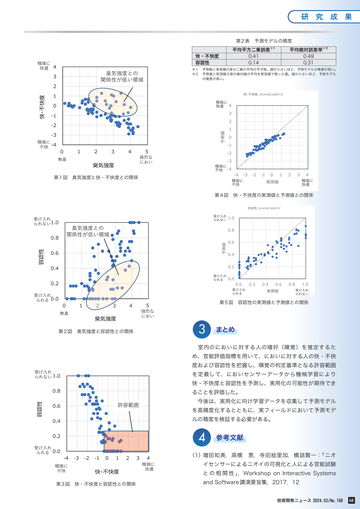
- ページ: 69
-
研 究 成 果
第 2 表 予測モデルの精度
平均平方二乗誤差※ 1
0.41
0.14
快・不快度
容認性
4
平均絶対誤差率※ 2
0.49
0.31
※ 1 予測値と実測値の差の二乗の平均の平方根。値が小さいほど、予測モデルの精度が高い。
※ 2 予測値と実測値の差の絶対値の平均を実測値で割った値。値が小さいほど、予測モデル
の精度が高い。
3
2
_AromaCoderV2
1
0
4
-1
3
2
-2
1
-3
0
-4
0
1
2
3
4
-1
5
-2
-3
-4
第 1 図 臭気強度と快・不快度との関係
-4
-3
-2
-1
0
1
2
3
4
第 4 図 快・不快度の実測値と予測値との関係
_AromaCoderV2
1.0
1.0
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.0
0.2
0.0
0
1
2
3
4
0.2
0.4
0.6
0.8
1.0
第 5 図 容認性の実測値と予測値との関係
5
3
第 2 図 臭気強度と容認性との関係
0.0
まとめ
室内のにおいに対する人の嗜好(嗅覚)を推定するた
め、官能評価指標を用いて、においに対する人の快・不快
度および容認性を把握し、嗅覚の判定基準となる許容範囲
1.0
を定義して、においセンサーデータから機械学習により
0.8
ることを評価した。
快・不快度と容認性を予測し、実用化の可能性が期待でき
今後は、実用化に向け学習データを収集して予測モデル
0.6
を高精度化するとともに、実フィールドにおいて予測モデ
ルの精度を検証する必要がある。
0.4
4
0.2
0.0
-4
-3
-2
-1
0
1
2
3
4
参考文献
(1) 増田知美,高橋 恵,寺田絵里加,橋詰賢一:「ニオ
イセンサーによるニオイの可視化と人による官能試験
と の 相 関 性 」,Workshop on Interactive Systems
第 3 図 快・不快度と容認性との関係
and Software 講演要旨集,2017.12
技術開発ニュース 2024.03/No.168
68
�
- ▲TOP
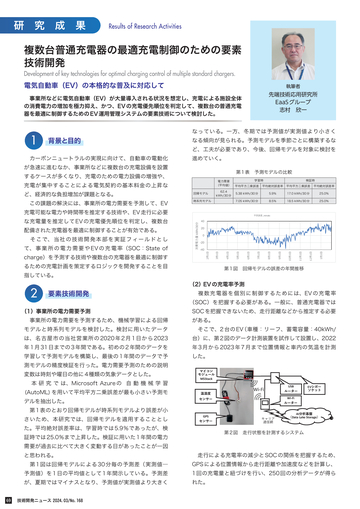
- ページ: 70
-
研 究 成 果
Results of Research Activities
複数台普通充電器の最適充電制御のための要素
技術開発
Development of key technologies for optimal charging control of multiple standard chargers.
電気自動車(EV)の本格的な普及に対応して
執筆者
先端技術応用研究所
EaaS グループ
志村 欣一
事業所などに電気自動車(EV)が大量導入される状況を想定し、充電による施設全体
の消費電力の増加を極力抑え、かつ、EV の充電優先順位を判定して、複数台の普通充電
器を最適に制御するための EV 運用管理システムの要素技術について検討した。
ど、工夫が必要であり、今後、回帰モデルを対象に検討を
進めていく。
が急速に進むなか、事業所などに複数台の充電設備を設置
第 1 表 予測モデルの比較
するケースが多くなり、充電のための電力設備の増強や、
電力需要
(平均値)
充電が集中することによる電気契約の基本料金の上昇な
時系列モデル
平均平方二乗誤差
平均絶対誤差率
5.38 kWh/30 分
5.9%
17.0 kWh/30 分
25.0%
7.05 kWh/30 分
8.5%
18.5 kWh/30 分
25.0%
充電可能な電力や時間帯を推定する技術や、EV 走行に必要
るための充電計画を策定するロジックを開発することを目
指している。
2
要素技術開発
(1)事業所の電力需要予測
1
1
1
9
1
1
8
1
6
1
1
5
7
1
4
1
charge)を予測する技術や複数台の充電器を最適に制御す
-40
3
て、 事 業 所 の 電 力 需 要 や EV の 充 電 率(SOC:State of
0
-20
1
そ こ で、 当 社 の 技 術 開 発 本 部 を 実 証 フ ィ ー ル ド と し
20
2
配備された充電器を最適に制御することが有効である。
_minato
40
kWh/30
な充電量を推定して EV の充電優先順位を判定し、複数台
12
この課題の解決には、事業所の電力需要を予測して、EV
62.4
kWh/30 分
検証時
平均絶対誤差率
1
ど、経済的な負担増加が課題となる。
回帰モデル
学習時
平均平方二乗誤差
11
カーボンニュートラルの実現に向けて、自動車の電動化
なる傾向が見られる。予測モデルを季節ごとに構築するな
1
背景と目的
10
1
なっている。一方、冬期では予測値が実測値より小さく
第 1 図 回帰モデルの誤差の年間推移
(2)EV の充電率予測
複数充電器を個別に制御するためには、EV の充電率
(SOC)を把握する必要がある。一般に、普通充電器では
SOC を把握できないため、走行距離などから推定する必要
事業所の電力需要を予測するため、機械学習による回帰
がある。
モデルと時系列モデルを検討した。検討に用いたデータ
そこで、2 台の EV(車種:リーフ、蓄電容量:40kWh/
は、名古屋市の当社営業所の 2020 年 2 月 1 日から 2023
台)に、第 2 図のデータ計測装置を試作して設置し、2022
年 1 月 31 日までの 3 年間である。初めの 2 年間のデータを
年 3 月から 2023 年 7 月まで位置情報と車内の気温を計測
学習して予測モデルを構築し、最後の 1 年間のデータで予
した。
測モデルの精度検証を行った。電力需要予測のための説明
変数は時刻や曜日の他に 4 種類の気象データとした。
本 研 究 で は、Microsoft Azure の 自 動 機 械 学 習
M5Stack
Wi-Fi
(AutoML) を用いて平均平方二乗誤差が最も小さい予測モ
さいため、本研究では、回帰モデルを適用することとし
EV
Wi-Fi
デルを抽出した。
第 1 表のとおり回帰モデルが時系列モデルより誤差が小
USB
GPS
た。平均絶対誤差率は、学習時では 5.9%であったが、検
AI
Data Lake Storage
第 2 図 走行状態を計測するシステム
証時では 25.0%まで上昇した。検証に用いた 1 年間の電力
需要が過去に比べて大きく変動する日があったことが一因
69
と思われる。
走行による充電率の減少と SOC の関係を把握するため、
第 1 図は回帰モデルによる 30 分毎の予測差(実測値―
GPS による位置情報から走行距離や加速度などを計算し、
予測値)を 1 日の平均値として 1 年間示している。予測差
1 回の充電量と紐づけを行い、250 回の分析データが得ら
が、夏期ではマイナスとなり、予測値が実測値より大きく
れた。
技術開発ニュース 2024.03/No.168
�
- ▲TOP
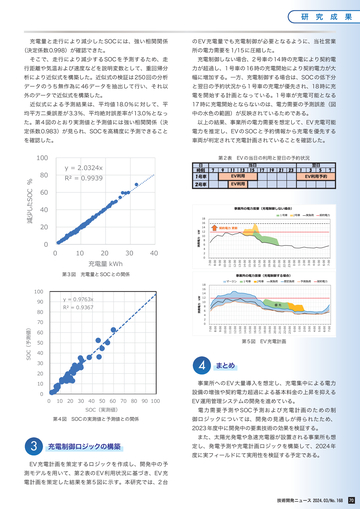
- ページ: 71
-
研 究 成 果
充電量と走行により減少した SOC には、強い相関関係
(決定係数 0.998)が確認できた。
の EV 充電量でも充電制御が必要となるように、当社営業
所の電力需要を 1/15 に圧縮した。
そこで、走行により減少する SOC を予測するため、走
充電制御しない場合、2 号車の 14 時の充電により契約電
行距離や気温および速度などを説明変数として、重回帰分
力が超過し、1 号車の 16 時の充電開始により契約電力が大
析により近似式を構築した。近似式の検証は 250 回の分析
幅に増加する。一方、充電制御する場合は、SOC の低下分
データのうち無作為に 46 データを抽出して行い、それ以
と翌日の予約状況から 1 号車の充電が優先され、18 時に充
外のデータで近似式を構築した。
電を開始する計画となっている。1 号車が充電可能となる
近似式による予測結果は、平均値 18.0%に対して、平
17 時に充電開始とならないのは、電力需要の予測誤差(図
均平方二乗誤差が 3.3%、平均絶対誤差率が 13.0%となっ
中の水色の範囲)が反映されているためである。
た。第 4 図のとおり実測値と予測値には強い相関関係(決
以上の結果、事業所の電力需要を想定して、EV 充電可能
定係数 0.983)が見られ、SOC を高精度に予測できること
電力を推定し、EV の SOC と予約情報から充電を優先する
を確認した。
車両が判定されて充電計画されていることを確認した。
100
第 2 表 EV の当日の利用と翌日の予約状況
y = 2.0324x
80
7
9
11
13
15
17
19
21
23
1
3
5
7
R² = 0.9939
SOC
60
40
2
18
16
20
k
14
12
10
8
0
6
4
40
2
21:00
22:00
23:00
0:00
1:00
2:00
3:00
4:00
5:00
6:00
7:00
23:00
0:00
1:00
2:00
3:00
4:00
5:00
6:00
7:00
20:00
22:00
19:00
20:00
21:00
18:00
19:00
17:00
18:00
16:00
15:00
14:00
13:00
7:00
kWh
12:00
0
11:00
30
9:00
20
10:00
10
8:00
0
第 3 図 充電量と SOC との関係
2
18
16
100
90
R² = 0.9367
80
k
14
y = 0.9763x
12
10
8
6
4
2
70
17:00
16:00
15:00
14:00
第 5 図 EV 充電計画
50
SOC
13:00
12:00
11:00
10:00
9:00
60
8:00
7:00
0
40
4
30
20
事業所への EV 大量導入を想定し、充電集中による電力
10
0
まとめ
設備の増強や契約電力超過による基本料金の上昇を抑える
0
10 20 30 40 50 60 70 80 90 100
SOC
第 4 図 SOC の実測値と予測値との関係
EV 運用管理システムの開発を進めている。
電力需要予測や SOC 予測および充電計画のための制
御ロジックについては、開発の見通しが得られたため、
2023 年度中に開発中の要素技術の効果を検証する。
3
充電制御ロジックの構築
また、太陽光発電や急速充電器が設置される事業所も想
定し、発電予測や充電計画ロジックを構築して、2024 年
度に実フィールドにて実用性を検証する予定である。
EV 充電計画を策定するロジックを作成し、開発中の予
測モデルを用いて、第 2 表の EV 利用状況に基づき、EV 充
電計画を策定した結果を第 5 図に示す。本研究では、2 台
技術開発ニュース 2024.03/No.168
70
�
- ▲TOP
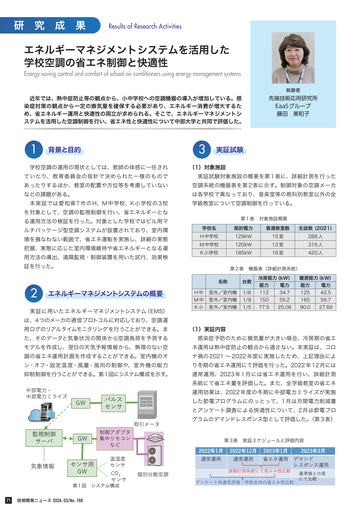
- ページ: 72
-
研 究 成 果
Results of Research Activities
エネルギーマネジメントシステムを活用した
学校空調の省エネ制御と快適性
Energy-saving control and comfort of school air conditioners using energy management systems
執筆者
近年では、熱中症防止等の観点から、小中学校への空調機器の導入が増加している。感
染症対策の観点から一定の換気量を確保する必要があり、エネルギー消費が増大するた
め、省エネルギー運用と快適性の両立が求められる。そこで、エネルギーマネジメントシ
ステムを活用した空調制御を行い、省エネ性と快適性について中部大学と共同で評価した。
1
3
背景と目的
学校空調の運用の現状としては、教師の体感に一任され
ていたり、教育委員会の指針で決められた一様のもので
先端技術応用研究所
EaaS グループ
藤田 美和子
実証試験
(1)対象施設
実証試験対象施設の概要を第 1 表に、詳細計測を行った
あったりするほか、教室の配置や方位等を考慮していない
空調系統の機器表を第 2 表に示す。制御対象の空調メーカ
などの課題がある。
は各学校で異なっており、音楽室等の教科別教室以外の全
本実証では愛知県 T 市の H、M 中学校、K 小学校の 3 校
学級教室について空調制御を行っている。
を対象として、空調の監視制御を行い、省エネルギーとな
る運用方法の検証を行った。対象とした学校ではビル用マ
ルチパッケージ型空調システムが設置されており、室内環
境を損なわない範囲で、省エネ運転を実施し、詳細の実態
把握、実態に応じた室内環境維持や省エネルギーとなる運
用方法の導出、遠隔監視・制御装置を用いた試行、効果検
第 1 表 対象施設概要
学校名
契約電力
普通教室数
生徒数 (2021)
H 中学校
129kW
15 室
288 人
M 中学校
120kW
13 室
316 人
K 小学校
185kW
16 室
420 人
証を行った。
2
第 2 表 機器表(詳細計測系統)
エネルギーマネジメントシステムの概要
実証に用いたエネルギーマネジメントシステム(EMS)
は、4つのメーカの通信プロトコルに対応しており、空調運
用ログのリアルタイムモニタリングを行うことができる。ま
た、そのデータと気象状況の関係から空調負荷を予測する
名称
台数
H中
室外/室内機
1/8
K小
室外/室内機
1/5
M中
室外/室内機
1/8
冷房能力 (kW)
暖房能力 (kW)
112
34.7
125
42.5
77.5
25.08
90.0
27.69
能力
150
電力
55.2
能力
165
電力
56.7
(1)実証内容
感染症予防のために換気量が大きい場合、冷房期の省エ
モデルを作成し、翌日の天気予報情報から、無理のない空
ネ運用は熱中症防止の観点から適さない。本実証は、コロ
調の省エネ運用計画を作成することができる。室内機のオ
ナ禍の 2021 ~ 2022 年度に実施したため、上記理由によ
ン・オフ・設定温度・風量・風向の制御や、室外 機の能力
り冬期の省エネ運用にて評価を行った。2022 年 12 月には
抑制制御を行うことができる。第 1図にシステム構成を示す。
通常運用、2023 年 1 月には省エネ運用を行い、詳細計測
系統にて省エネ量を評価した。また、全学級教室の省エネ
運用効果は、2022 年度の冬期に中部電力ミライズが実施
GW
12345
1111
12345
12345
12345
12345
した節電プログラムにのっとって、1 月は月間電力削減量
とアンケート調査による快適性について、2 月は節電プロ
グラムのデマンドレスポンス型として評価した。(第 3 表)
GW
第 3 表 実証スケジュールと評価内容
2022 1
GW
CO2
第 1 図 システム構成
71
技術開発ニュース 2024.03/No.168
2022
12
2023 1
2023
2
�
- ▲TOP
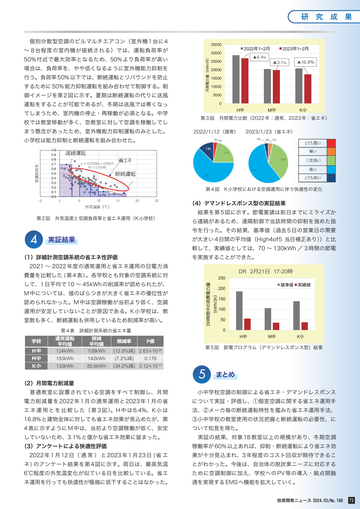
- ページ: 73
-
研 究 成 果
個別分散型空調のビルマルチエアコン(室外機 1 台に 4
35000
~ 8 台程度の室内機が接続される)では、運転負荷率が
場合は、負荷率を、やや低くなるように室外機能力抑制を
kWh/
50% 付近で最大効率となるため、50% より負荷率が高い
するために 50% 能力抑制運転を組み合わせて制御する。制
10000
御イメージを第 2 図に示す。夏期は断続運転の代りに送風
5000
運転をすることが可能であるが、冬期は送風では寒くなっ
0
まう懸念があったため、室外機能力抑制運転のみとした。
16.8
3.1
20000
15000
校では教室移動が多く、空教室に対して空調を稼働してし
2023 1~2
6.4
25000
行う。負荷率 50% 以下では、断続運転とリバウンドを防止
てしまうため、室内機の停止・再稼働が必須となる。中学
2022 1~2
30000
H
M
K
第 3 図 月間電力比較(2022 年;通常、2023 年:省エネ)
2022/1/12(通常) 2023/1/23(省エネ)
小学校は能力抑制と断続運転を組み合わせた。
13%
第 4 図 K 小学校における空調運用に伴う快適性の変化
(4)デマンドレスポンス型の実証結果
第 2 図 外気温度と空調負荷率と省エネ運用(K 小学校)
4
結果を第 5 図に示す。節電要請は前日までにミライズか
ら連絡があるため、遠隔制御で当該時間の抑制を強めた指
令を行った。その結果、基準値(過去 5 日の営業日の需要
実証結果
が大きい 4 日間の平均値(High4of5 当日補正あり))と比
較して、実績値としては、70 ~ 130kWh / 3 時間の節電
(1)詳細計測空調系統の省エネ性評価
を実施することができた。
2021 ~ 2022 年度の通常運用と省エネ運用の日電力消
費量を比較した ( 第 4 表 )。各学校とも対象の空調系統に対
250
して、1 日平均で 10 ~ 45kWh の削減率が認められたが、
17-20
200
kWh/3h
M 中については、値のばらつきが大きく省エネの優位性が
認められなかった。M 中は空調稼働が当初より低く、空調
DR
運用が安定していないことが原因である。K 小学校は、教
室数も多く、断続運転も併用しているため削減率が高い。
DR 2 21
第 4 表 詳細計測系統の省エネ量
150
100
50
0
P
124kWh
108kWh
(12.9% ) 2.63×10-04
153kWh
142kWh
(7.2% )
130kWh
85.6kWh
(34.2% ) 3.12×10-11
H
M
K
第 5 図 節電プログラム(デマンドレスポンス型)結果
0.176
(2)月間電力削減量
5
まとめ
普通教室に設置されている空調をすべて制御し、月間
小中学校空調の制御による省エネ・デマンドレスポンス
電力削減量を 2022 年 1 月の通常運用と 2023 年 1 月の省
について実証・評価し、①個室空調に関する省エネ運用手
エ ネ 運 用 と を 比 較 し た( 第 3 図 )。H 中 は 6.4%、K 小 は
法、②メーカ毎の断続運転特性を鑑みた省エネ運用手法、
16.8% と建物全体に対しても省エネ効果が見込めたが、第
③小中学校の教室使用の状況把握と断続運転の必要性、に
4 表に示すように M 中は、当初より空調稼働が低く、安定
ついて知見を得た。
していないため、3.1% と僅かな省エネ効果に留まった。
実証の結果、対象 18 教室以上の規模があり、冬期空調
(3)アンケートによる快適性評価
稼働率が 60% 以上あれば、抑制・断続運転により省エネ効
2022 年 1 月 12 日( 通 常 ) と 2023 年 1 月 23 日 ( 省 エ
果が十分見込まれ、3 年程度のコスト回収が期待できるこ
ネ ) のアンケート結果を第 4 図に示す。両日は、最高気温
とがわかった。今後は、自治体の脱炭素ニーズに対応する
6℃程度の外気温変化が似ている日を比較している。省エ
ために空調制御に加え、学校への PV 等の導入・拠点間融
ネ運用を行っても快適性が極端に低下することはなかった。
通を実現する EMS へ機能を拡大していく。
技術開発ニュース 2024.03/No.168
72
�
- ▲TOP
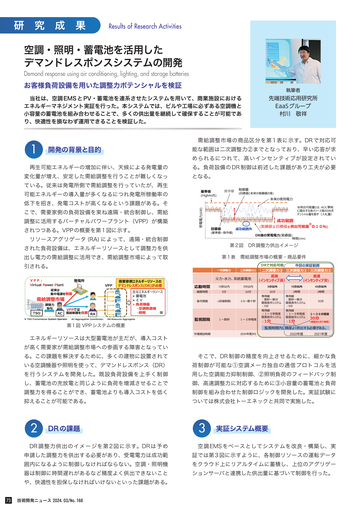
- ページ: 74
-
研 究 成 果
Results of Research Activities
空調・照明・蓄電池を活用した
デマンドレスポンスシステムの開発
Demand response using air conditioning, lighting, and storage batteries
お客様負荷設備を用いた調整力ポテンシャルを検証
執筆者
当社は、空調 EMS と PV・蓄電池を連系させたシステムを用いて、商業施設における
エネルギーマネジメント実証を行った。本システムでは、ビルや工場に必ずある空調機と
小容量の蓄電池を組み合わせることで、多くの供出量を継続して確保することが可能であ
り、快適性を損なわず運用できることを検証した。
1
先端技術応用研究所
EaaS グループ
村川 敬祥
需給調整市場の商品区分を第 1 表に示す。DR で対応可
開発の背景と目的
能な範囲は二次調整力②までとなっており、早い応答が求
められるにつれて、高いインセンティブが設定されてい
再生可能エネルギーの増加に伴い、天候による発電量の
る。負荷設備の DR 制御は前述した課題があり工夫が必要
変化量が増え、安定した需給調整を行うことが難しくなっ
となる。
ている。従来は発電所側で需給調整を行っていたが、再生
可能エネルギーの導入量が多くなるにつれ発電所稼働率の
(
(High4of5)
)
低下を招き、発電コストが高くなるという課題がある。そ
AC
(kW)
こで、需要家側の負荷設備を束ね遠隔・統合制御し、需給
調整に活用するバーチャルパワープラント(VPP)が構築
±
(
されつつある。VPP の概要を第 1 図に示す。
(
リソースアグリゲータ (RA) によって、遠隔・統合制御
)
DR
)
(
)
(min)
された負荷設備は、エネルギーリソースとして調整力を供
第 2 図 DR 調整力供出イメージ
出し電力の需給調整に活用でき、需給調整市場によって取
第 1 表 需給調整市場の概要・商品要件
引される。
DR
(
Virtual Power Plant
VPP
(DR)
10
TSO:Transmission
AC
VPP
5
5
5
-(
TSO
DR
30
)
45
3
3
30
0.5
30
5
5
1
1
RA
AC:Aggregation Coordinator
RA:Resource Aggregator
第 1 図 VPP システムの概要
2024
エネルギーリソースは大型蓄電池が主だが、導入コスト
)
15
2022
30
(
5
)
2021
が高く需要家が需給調整市場への参画する障害となってい
る。この課題を解決するために、多くの建物に設置されて
そこで、DR 制御の精度を向上させるために、細かな負
いる空調機器や照明を使って、デマンドレスポンス(DR)
荷制御が可能な①空調メーカ独自の通信プロトコルを活
を行うシステムを開発した。既設負荷設備を上手く制御
用した空調能力抑制制御、②照明負荷のフィードバック制
し、蓄電池の充放電と同じように負荷を増減させることで
御、高速調整力に対応するために③小容量の蓄電池と負荷
調整力を得ることができ、蓄電池よりも導入コストを低く
制御を組み合わせた制御ロジックを開発した。実証試験に
抑えることが可能である。
ついては株式会社トーエネックと共同で実施した。
2
DR の課題
実証システム概要
DR 調整力供出のイメージを第 2 図に示す。DR は予め
空調 EMS をベースとしてシステムを改良・構築し、実
申請した調整力を供出する必要があり、受電電力は成功範
証では第 3 図に示すように、各制御リソースの運転データ
囲内になるように制御しなければならない。空調・照明機
をクラウド上にリアルタイムに蓄積し、上位のアグリゲー
器は制御に時間遅れがあるなど精度よく供出できないこと
ションサーバと連携した供出量に基づいて制御を行った。
や、快適性を担保しなければいけないといった課題がある。
73
3
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 75
-
研 究 成 果
しかし、1 分評価の場合、空調能力抑制制御単独では達
EMS
成が難しいことがわかった。
(2) 照明のフィードバック制御
照 明 に お け る DR 制 御 は 目 標 値 に 追 従 で き る よ う な
フィードバック制御を考案した。三次調整力②の場合、
監視間隔が 5 分であるため、目標に合わせられるよう、
1 分粒度にてリソースを制御した。フィードバック制御を
DR
使って DR 実証を行った結果、30 分評価の場合、実績値を
25kW
22kWh
Box type PC
100% 成功範囲内に収めることができたが、1 分評価の場
第 3 図 実証システム概要
合、成功範囲滞在率は 86% 程度となった。負荷制御単体で
は、三次調整力②は達成できるが、三次調整力①以上の応
4
動精度は確保できないことがわかった。
制御手法と効果
(3) 蓄電池との連携制御
早い調整力ほど高いインセンティブが期待できるため、
(1) 空調能力抑制制御
負荷制御に加えて、出力 25kW、蓄電容量 22kWh の蓄電
従来の機器を起動・停止する空調制御では、快適性を著
池と組み合わせて連系制御させることで目標値に対する 1
しく損なうことが多く、また、細かな負荷調整ができない
分値整合を試みた。通常の DR のための照明フィードバッ
ため、調整力を供出することが難しかった。そこで、各空
ク制御を行いながら、目標値との差を埋めるように、制御
調メーカ独自の通信プロトコルと連携して、細かに室外機
間隔を 10 秒にて蓄電池充放電を行った。蓄電池無の結果
能力抑制制御を行う空調 EMS を活用して DR を実施した。
と蓄電池有の結果を第 6 図に示す。蓄電池有の 1 分評価の
この EMS では、10% 刻みで室外機能力を制御できるため、
成功範囲滞在率は 93% となった。100% を達成しなかった
空調を稼働させたままで DR を行うことができ、快適性を
原因は、蓄電池の充電が飽和したことにより連携制御が出
維持したまま空調による調整力供出(消費電力削減)が可
来なくなったためである。そこで、蓄電池の充電率を監視
能となった。
し、他リソースを用いて目標値に対する指令値を意図的に
結果を第 4 図に示す。夏期の空調制御(外気処理空調機
ずらすことで、充電率を中央に維持する制御を考案した。
停止と室外機能力抑制とローテーション運転)の結果、抑
本手法を用いれば、蓄電池の充電率を上下限範囲内に収め
制有の快適温度は制御無時の快適温度と同様に 26℃以下を
つつ、3 時間の三次調整力①の成功範囲滞在率 100% を達
保ちつつ、40kW( 定格消費電力の 4 割削減 )、の抑制が受
成することができる。
定格消費電力の4割削減
温度(℃)
[kWh/30 ]
■制御無(8/11)■制御有
(8/12)
湿度(%)
電点で確認できた。
1 分評価︓失敗
成功範囲外
放電
1 分評価︓成功
成功範囲内
蓄電池が 満充電の
た め 、放電不可
1 分評価︓成功
成功範囲外
滞在率 93%
充電
(a) 蓄電池無し (b) 蓄電池有り
第 6 図 照明 DR と蓄電池の組み合わせ実証の結果
(a) 空調消費電力 (b) 温湿度
第 4 図 空調能力抑制制御の比較
また、空調能力抑制制御にて、DR 実証した結果を第 5
図に示す。三次調整力②を想定した 30 分評価の場合、実
績値の成功範囲内滞在率は 100% となった。
指令値 指令値 指令値
10kW 40kW 20kW
指令値 指令値 指令値
10kW 40kW 20kW
5
まとめ
DR 実証の結果、空調や照明設備をエネルギーリソース
とし、快適性を維持したまま、三次調整力②を供出するこ
とができた。さらに、小容量の蓄電池制御を組み合わせる
ことで、高いインセンティブが期待できる三次調整力①を
供出できる見込みを得た。
今後はお客さま向けのエネルギーマネジメントシステム
(a) DR 実証結果 30 分評価 (b) DR 実証結果 1 分評価
第 5 図 空調 DR 実証結果
開発において本成果を適用・実装していく。
技術開発ニュース 2024.03/No.168
74
�
- ▲TOP
- ページ: 76
- Results of Research Activities
暮らしにおける省エネや快適さの支援技術の
定量評価
Research on technologies supporting energy efficiency and comfort in daily living.
・半てんやこたつの暖房効果と洗濯物の部屋干しによる加湿効果
年々厳しさを増す冬の寒さや、電気料金の高騰により快適かつ省エネな暮らしへの関心
が高まっている。本研究では「半てんやこたつを活用することによる省エネ効果」と「洗
濯物の部屋干しなどによる加湿効果」について、外気制御により冬の環境を忠実に再現可
能な実験棟にて、実際の温熱環境や各家電の消費電力量の測定・評価を行った。
1
半てんやこたつによる厚着・採暖効果と
省エネ性について
(1) 実験概要
執筆者
先端技術応用研究所
EaaS グループ
久保田 潮
イ こたつによる採暖効果
半てんを羽織り、こたつの設定を弱中(調節つまみ 4
分の 1)と中(調節つまみ 2 分の 1)にした場合の被験
者試験のアンケート結果を第 2 図に示す。また、各条件
外気 7℃・50%RH、室内のエアコン設定温度を 23℃と
におけるエアコンおよびこたつの消費電力量を第 3 図
した状態を基準とし、半てんを羽織ることやこたつで採暖
に示す。半てんを着用し、こたつを使用することで設
することによる生理心理反応および設定温度を下げること
定温度を 4~6℃下げても、温冷感や快適感、満足感は 0
による省エネ効果について検証を行った。試験条件は第 1
以上の値を保っている。一方で 6℃下げた場合は大気中
表の全 6 通りであり、条件ごとに 4 人の被験者に対して、
に暴露されている手先に寒さを感じやすい結果となっ
全身・上半身・下半身・手先の温冷感および快適感と満足
た。設定温度を 6℃下げ、こたつの設定を弱中とした場
感について -3(寒い・非常に不快・非常に不満)から +3
合は 1 時間当たり 0.08kWh(22.2%)、中とした場合は
(暑い・非常に快適・非常に満足)の計 7 段階の指標でアン
0.03kWh(8.3%) の消費電力量の削減となることが分
ケートを実施した。
A
B
C
かった。
第 1 表 試験条件
内容
設定温度 23℃・
部屋着・こたつ無し
設定温度 23℃・
半てん着用・こたつ無し
設定温度 21℃・
半てん着用・こたつ無し
条件
条件
研 究 成 果
D
E
F
内容
設定温度 19℃・
半てん着用・こたつ弱中
設定温度 17℃・
半てん着用・こたつ弱中
設定温度 17℃・
半てん着用・こたつ中
(2) 実験結果
ア 半てんによる厚着効果
半てんを羽織った場合の被験者試験のアンケート結果
を第 1 図に示す。なお、アンケート結果は被験者 4 人の
平均値でプロットしてある。基準である条件 A と比較す
第 2 図 被験者試験におけるアンケート結果 (b)
ると、半てんを羽織ることで全身・上半身の温冷感は上
昇し、快適感や満足感も 0 以上を保っていることが分か
る。半てんを羽織り、エアコンの設定温度を 2℃下げる
ことで、1 時間当たりの消費電力量は 0.03kWh(8.3%)
の削減となることが分かった。
22.2%
8.3%
第 3 図 エアコンとこたつの 1 時間当たりの消費電力量
第 1 図 被験者試験におけるアンケート結果 (a)
75
技術開発ニュース 2024.03/No.168
�
- ▲TOP
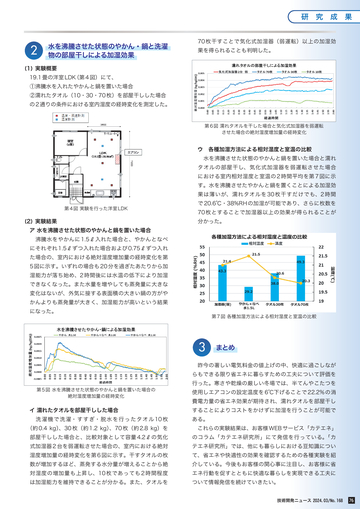
- ページ: 77
-
研 究 成 果
2
水を沸騰させた状態のやかん・鍋と洗濯
物の部屋干しによる加湿効果
70 枚干すことで気化式加湿器(弱運転)以上の加湿効
果を得られることも判明した。
(1) 実験概要
19.1 畳の洋室 LDK(第 4 図)にて、
①沸騰水を入れたやかんと鍋を置いた場合
②濡れたタオル(10・30・70 枚)を部屋干しした場合
の 2 通りの条件における室内湿度の経時変化を測定した。
第 6 図 濡れタオルを干した場合と気化式加湿器を弱運転
させた場合の絶対湿度増加量の経時変化
ウ 各種加湿方法による相対湿度と室温の比較
水を沸騰させた状態のやかんと鍋を置いた場合と濡れ
タオルの部屋干し、気化式加湿器を弱運転させた場合
における室内相対湿度と室温の 2 時間平均を第 7 図に示
す。水を沸騰させたやかんと鍋を置くことによる加湿効
果は薄いが、濡れタオルを 30 枚干すだけでも、2 時間
第 4 図 実験を行った洋室 LDK
(2) 実験結果
ア 水を沸騰させた状態のやかんと鍋を置いた場合
で 20.6℃・38%RH の加湿が可能であり、さらに枚数を
70 枚とすることで加湿器以上の効果が得られることが
分かった。
沸騰水をやかんに 1.5ℓ入れた場合と、やかんとなべ
にそれぞれ 1.5ℓずつ入れた場合および 0.75ℓずつ入れ
た場合の、室内における絶対湿度増加量の経時変化を第
5 図に示す。いずれの場合も 20 分を過ぎたあたりから加
湿能力が落ち始め、2 時間後には水温の低下により加湿
できなくなった。また水量を増やしても蒸発量に大きな
変化はないが、外気に接する表面積の大きい鍋の方がや
かんよりも蒸発量が大きく、加湿能力が高いという結果
になった。
第 7 図 各種加湿方法による相対湿度と室温の比較
3
まとめ
昨今の著しい電気料金の値上げの中、快適に過ごしなが
らもできる限り省エネに暮らすための工夫について評価を
第 5 図 水を沸騰させた状態のやかんと鍋を置いた場合の
絶対湿度増加量の経時変化
イ 濡れたタオルを部屋干しした場合
洗 濯 機 で 洗 濯・ す す ぎ・ 脱 水 を 行 っ た タ オ ル 10 枚
行った。寒さや乾燥の厳しい冬場では、半てんやこたつを
使用しエアコンの設定温度を 6℃下げることで 22.2% の消
費電力量の省エネ効果が期待され、濡れタオルを部屋干し
することによりコストをかけずに加湿を行うことが可能で
ある。
(約 0.4 kg)、30 枚(約 1.2 kg)、70 枚(約 2.8 kg)を
これらの実験結果は、お客様 WEB サービス「カテエネ」
部屋干しした場合と、比較対象として容量 4.2ℓの気化
のコラム「カテエネ研究所」にて発信を行っている。「カ
式加湿器 2 台を弱運転させた場合の、室内における絶対
テエネ研究所」では、他にも暮らしにおける豆知識につい
湿度増加量の経時変化を第 6 図に示す。干すタオルの枚
て、省エネや快適性の効果を確認するための各種実験を紹
数が増加するほど、蒸発する水分量が増えることから絶
介している。今後もお客様の関心事に注目し、お客様に省
対湿度の増加量も上昇し、10 枚であっても 2 時間程度
エネ行動を促すとともに快適な暮らしを実現できる工夫に
は加湿能力を維持できることが分かる。また、タオルを
ついて情報発信を続けていきたい。
技術開発ニュース 2024.03/No.168
76
�
- ▲TOP
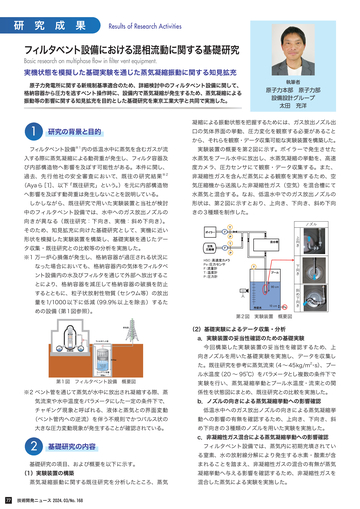
- ページ: 78
-
研 究 成 果
Results of Research Activities
フィルタベント設備における混相流動に関する基礎研究
Basic research on multiphase flow in filter vent equipment.
実機状態を模擬した基礎実験を通じた蒸気凝縮振動に関する知見拡充
執筆者
原子力発電所に関する新規制基準適合のため、詳細検討中のフィルタベント設備に関して、
格納容器から圧力を逃すベント操作時に、設備内で蒸気凝縮が発生するため、蒸気凝縮による
振動等の影響に関する知見拡充を目的とした基礎研究を東京工業大学と共同で実施した。
1
研究の背景と目的
フィルタベント設備
原子力本部 原子力部
設備設計グループ
太田 充洋
凝縮による振動状態を把握するためには、ガス放出ノズル出
口の気体界面の挙動、圧力変化を観察する必要があること
から、それらを観察・データ収集可能な実験装置を構築した。
内の低温水中に蒸気を含むガスが流
実験装置の概要を第 2 図に示す。ボイラーで発生させた
入する際に蒸気凝縮による動荷重が発生し、フィルタ容器及
水蒸気をプール水中に放出し、水蒸気凝縮の挙動を、高速
び内部構造物へ影響を及ぼす可能性がある。本件に関し、
度カメラ、圧力センサにて観察・データ収集する。また、
過去、先行他社の安全 審査において、既往の研究結果 ※ 2
非凝縮性ガスを含んだ蒸気による観察を実施するため、空
(Ayaら[1]、以下「既往研究」という。)を元に内部構造物
気圧縮機から送風した非凝縮性ガス(空気)を混合槽にて
※1
へ影響を及ぼす動荷重は発生しないことを説明している。
水蒸気と混合する。なお、低温水中でのガス放出ノズルの
しかしながら、既往研究で用いた実験装置と当社が検討
形状は、第 2 図に示すとおり、上向き、下向き、斜め下向
中のフィルタベント設備では、水中へのガス放出ノズルの
きの 3 種類を制作した。
向きが異なる(既往研究:下向き、実機:斜め下向き)。
そのため、知見拡充に向けた基礎研究として、実機に近い
T
F
形状を模擬した実験装置を構築し、基礎実験を通じたデー
P
T
タ収集・既往研究との比較等の分析を実施した。
※1 万一炉心損傷が発生し、格納容器が過圧される状況に
なった場合においても、格納容器内の気体をフィルタベ
ント設備内の水及びフィルタを通じて外部へ放出するこ
とにより、格納容器を減圧して格納容器の破損を防止
F
P
HSC
Po
F
T
P
T
90 cm
するとともに、粒子状放射性物質(セシウム等)の放出
量を1/1000 以下に低減(99.9% 以上を除去)するた
めの設備(第 1図参照)。
10 cm
Po
第 2 図 実験装置 概要図
(2)基礎実験によるデータ収集・分析
a.実験装置の妥当性確認のための基礎実験
今回構築した実 験装置の妥当性を確 認するため、上
向きノズルを用いた基礎実験を実施し、データを収集し
た。既往研究を参考に蒸気流束(4 ~ 45kg/m2・s)、プー
第 1 図 フィルタベント設備 概要図
※2 ベント管を通じて蒸気が水中に放出され凝縮する際、蒸
気流束や水中温度をパラメータにした一定の条件下で、
チャギング現象と呼ばれる、液体と蒸気との界面変動
(ベント管内への逆流)を伴う不規則でかつパルス状の
大きな圧力変動現象が発生することが確認されている。
2
基礎研究の内容
基礎研究の項目、および概要を以下に示す。
(1)実験装置の構築
蒸気凝縮振動に関する既往研究を分析したところ、蒸気
77
技術開発ニュース 2024.03/No.168
ル水温度(20 ~ 95℃)をパラメータとし複数の条件下で
実験を行い、蒸気凝縮挙動とプール水温度・流束との関
係性を状態図にまとめ、既往研究との比較を実施した。
b.ノズルの向きによる蒸気凝縮挙動への影響確認
低温水中へのガス放出ノズルの向きによる蒸気凝縮挙
動への影響の有無を確認するため、上向き、下向き、斜
め下向きの 3 種類のノズルを用いた実験を実施した。
c.非凝縮性ガス混合による蒸気凝縮挙動への影響確認
フィルタベント設備では、蒸気内に初期充填されてい
る窒素、水の放射線分解により発生する水素・酸素が含
まれることを踏まえ、非凝縮性ガスの混合の有無が蒸気
凝縮挙動へ与える影響を確認するため、非凝縮性ガスを
混合した蒸気による実験を実施した。
�
- ▲TOP
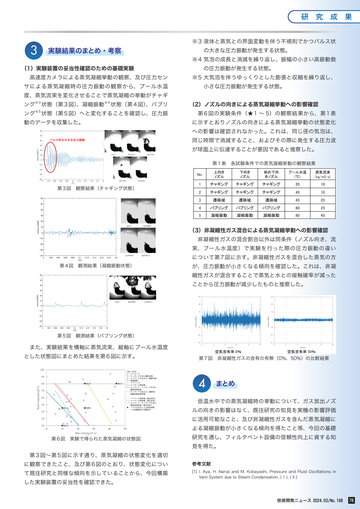
- ページ: 79
-
研 究 成 果
3
※ 3 液体と蒸気との界面変動を伴う不規則でかつパルス状
実験結果のまとめ・考察
の大きな圧力振動が発生する状態。
(1)実験装置の妥当性確認のための基礎実験
高速度カメラによる蒸気凝縮挙動の観察、及び圧力セン
※ 4 気泡の成長と消滅を繰り返し、振幅の小さい高振動数
の圧力振動が発生する状態。
※ 5 大気泡を伴うゆっくりとした膨張と収縮を繰り返し、
サによる蒸気凝縮時の圧力振動の観察から、プール水温
小さな圧力振動が発生する状態。
度、蒸気流束を変化させることで蒸気凝縮の挙動がチャギ
ング※ 3 状態(第 3 図)、凝縮振動※ 4 状態(第 4 図)、バブリ
ング
※5
状態(第 5 図)へと変化することを確認し、圧力振
動のデータを収集した。
(2)ノズルの向きによる蒸気凝縮挙動への影響確認
第 6 図の実験条件(★ 1 ~ 5)の観察結果から、第 1 表
に示すとおりノズルの向きによる蒸気凝縮挙動の状態変化
への影響は確認されなかった。これは、同じ径の気泡は、
同じ時間で消滅すること、およびその際に発生する圧力波
が球面上に伝達することが要因であると推察した。
第 1 表 各試験条件での蒸気凝縮挙動の観察結果
No.
第 3 図 観察結果(チャギング状態)
( )
(kg/m2 s)
1
20
10
2
45
10
3
45
25
4
80
25
5
80
45
(3)非凝縮性ガス混合による蒸気凝縮挙動への影響確認
非凝縮性ガスの混合割合以外は同条件(ノズル向き、流
束、プール水温度)で実験を行った際の圧力振動の違い
について第 7 図に示す。非凝縮性ガスを混合した蒸気の方
第 4 図 観測結果(凝縮振動状態)
が、圧力振動が小さくなる傾向を確認した。これは、非凝
縮性ガスが混合することで蒸気と水との接触確率が減った
第 5 図 観測結果(バブリング状態)
また、実験結果を横軸に蒸気流束、縦軸にプール水温度
とした状態図にまとめた結果を第 6 図に示す。
No.4
No.5
×
30
30
20
20
10
10
pressure [KPa]
pressure [KPa]
ことから圧力振動が減少したものと推察した。
0
-10
-20
0
-10
-20
-30
-30
0
2
4
6
time [s]
8
10
0
2
4
6
8
10
time [s]
0
50
第 7 図 非凝縮性ガスの含有の有無(0%、50%)の比較結果
4
まとめ
低温水中での蒸気凝縮時の挙動について、ガス放出ノズ
No.2
No.3
ルの向きの影響はなく、既往研究の知見を実機の影響評価
に活用可能なこと、及び非凝縮性ガスを含んだ蒸気凝縮に
No.1
第 6 図 実験で得られた蒸気凝縮の状態図
よる凝縮振動が小さくなる傾向を得たこと等、今回の基礎
研究を通し、フィルタベント設備の信頼性向上に資する知
見を得た。
第 3 図~第 5 図に示す通り、蒸気凝縮の状態変化を適切
に観察できたこと、及び第 6 図のとおり、状態変化につい
て既往研究と同様な傾向を示していることから、今回構築
した実験装置の妥当性を確認できた。
参考文献
[1] I. Aya, H. Nariai and M. Kobayashi, Pressure and Fluid Oscillations in
Vent System due to Steam Condensation, ( Ⅰ ), ( Ⅱ )
技術開発ニュース 2024.03/No.168
78
�
- ▲TOP
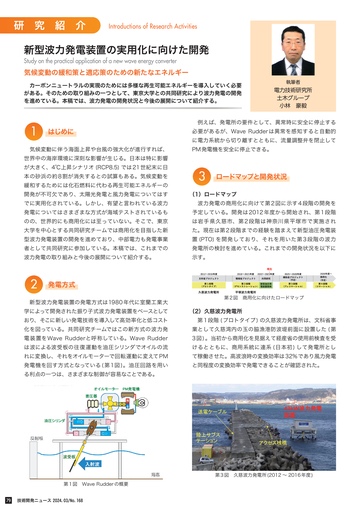
- ページ: 80
-
研 究 紹 介
Introductions of Research Activities
新型波力発電装置の実用化に向けた開発
Study on the practical application of a new wave energy converter
気候変動の緩和策と適応策のための新たなエネルギー
執筆者
カーボンニュートラルの実現のためには多様な再生可能エネルギーを導入していく必要
がある。そのための取り組みの一つとして、東京大学との共同研究により波力発電の開発
を進めている。本稿では、波力発電の開発状況と今後の展開について紹介する。
1
はじめに
気候変動に伴う海面上昇や台風の強大化が進行すれば、
電力技術研究所
土木グループ
小林 豪毅
例えば、発電所の要件として、異常時に安全に停止する
必要があるが、Wave Rudder は異常を感知すると自動的
に電力系統から切り離すとともに、流量調整弁を閉止して
PM 発電機を安全に停止できる。
世界中の海岸環境に深刻な影響が生じる。日本は特に影響
が大きく、4℃上昇シナリオ (RCP8.5) では 21 世紀末に日
本の砂浜の約 8 割が消失するとの試算もある。気候変動を
緩和するためには化石燃料に代わる再生可能エネルギーの
開発が不可欠であり、太陽光発電と風力発電についてはす
でに実用化されている。しかし、有望と⾔われている波力
3
ロードマップと開発状況
(1)ロードマップ
波力発電の商用化に向けて第 2 図に示す 4 段階の開発を
発電についてはさまざまな方式が海域テストされているも
予定している。開発は 2012 年度から開始され、第 1 段階
のの、世界的にも商用化には至っていない。そこで、東京
は岩手県久慈市、第 2 段階は神奈川県平塚市で実施され
大学を中心とする共同研究チームでは商用化を目指した新
た。現在は第 2 段階までの経験を踏まえて新型油圧発電装
型波力発電装置の開発を進めており、中部電力も発電事業
置 (PTO) を開発しており、それを用いた第 3 段階の波力
者として共同研究に参加している。本稿では、これまでの
発電所の検討を進めている。これまでの開発状況を以下に
波力発電の取り組みと今後の展開について紹介する。
示す。
2012 2016
2
発電方式
新型波力発電装置の発電方式は1980 年代に室蘭工業大
学によって開発された振り子式波力発電装置をベースとして
おり、そこに新しい発電技術を導入して高効率化と低コスト
2018 2021
2022 2023
(
(
)
(
)
2030
2025 2028
)
(
(
)
)
)
第 2 図 商用化に向けたロードマップ
(2)久慈波力発電所
第 1 段階 ( プロトタイプ ) の久慈波力発電所は、文科省事
化を図っている。共同研究チームではこの新方式の波力発
業として久慈湾内の玉の脇漁港防波堤前面に設置した ( 第
電装置をWave Rudderと呼称している。Wave Rudder
3 図 )。当初から商用化を見据えて経産省の使用前検査を受
は波による波受板の往復運動を油圧シリンダでオイルの流
けるとともに、商用系統に連系 ( 日本初 ) して発電所とし
れに変換し、それをオイルモーターで回転運動に変えて PM
て稼働させた。高波浪時の変換効率は 32% であり風力発電
発電機を回す方式となっている( 第 1図 )。油圧回路を用い
と同程度の変換効率で発電できることが確認された。
る利点の一つは、さまざまな制御が容易なことである。
43kW
第 3 図 久慈波力発電所 (2012 ~ 2016 年度 )
第 1 図 Wave Rudder の概要
79
(
技術開発ニュース 2024.03/No.168
�
- ▲TOP
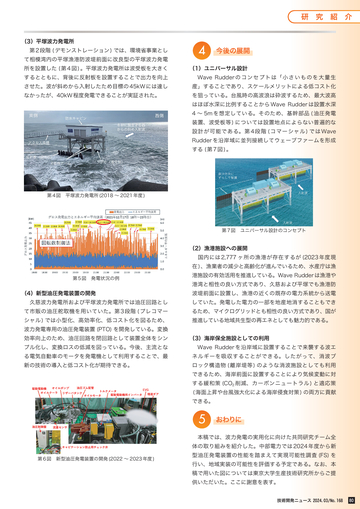
- ページ: 81
-
研 究 紹 介
(3)平塚波力発電所
第 2 段階 ( デモンストレーション ) では、環境省事業とし
て相模湾内の平塚漁港防波堤前面に改良型の平塚波力発電
所を設置した ( 第 4 図 )。平塚波力発電所は波受板を大きく
するとともに、背後に反射板を設置することで出力を向上
4
今後の展開
(1)ユニバーサル設計
Wave Rudder の コ ン セ プ ト は「 小 さ い も の を 大 量 生
させた。波が斜めから入射したため目標の 45kW には達し
産」することであり、スケールメリットによる低コスト化
なかったが、40kW 程度発電できることが実証された。
を狙っている。台風時の高波浪は砕波するため、最大波高
はほぼ水深に比例することから Wave Rudder は設置水深
4 ~ 5m を想定している。そのため、基幹部品 ( 油圧発電
装置、波受板等 ) については設置地点によらない普遍的な
設計が可能である。第 4 段階 ( コマーシャル ) では Wave
Rudder を沿岸域に並列接続してウェーブファームを形成
する ( 第 7 図 )。
第 4 図 平塚波力発電所 (2018 ~ 2021 年度 )
第 7 図 ユニバーサル設計のコンセプト
(2)漁港施設への展開
国内には 2,777 ヶ所の漁港が存在するが(2023 年度現
在 )、漁業者の減少と高齢化が進んでいるため、水産庁は漁
港施設の有効活用を推進している。Wave Rudder は漁港や
第 5 図 発電状況の例
港湾と相性の良い方式であり、久慈および平塚でも漁港防
(4)新型油圧発電装置の開発
波堤前面に設置し、漁港の近くの既存の電力系統から送電
久慈波力発電所および平塚波力発電所では油圧回路とし
していた。発電した電力の一部を地産地消することもでき
て市販の油圧舵取機を用いていた。第 3 段階 ( プレコマー
るため、マイクログリッドとも相性の良い方式であり、国が
シャル ) では小型化、高効率化、低コスト化を図るため、
推進している地域共生型の再エネとしても魅力的である。
波力発電専用の油圧発電装置 (PTO) を開発している。変換
効率向上のため、油圧回路を閉回路として装置全体をシン
プル化し、変換ロスの低減を図っている。今後、主流とな
(3)海岸保全施設としての利用
Wave Rudder を沿岸域に設置することで来襲する波エ
る電気自動車のモータを発電機として利用することで、最
ネルギーを吸収することができる。したがって、消波ブ
新の技術の導入と低コスト化が期待できる。
ロック構造物 ( 離岸堤等 ) のような消波施設としても利用
できるため、海岸前面に設置することにより気候変動に対
EVG
する緩和策 (CO2 削減、カーボンニュートラル ) と適応策
( 海面上昇や台風強大化による海岸侵食対策 ) の両方に貢献
できる。
5
おわりに
本稿では、波力発電の実用化に向けた共同研究チーム全
体の取り組みを紹介した。中部電力では 2024 年度から新
第 6 図 新型油圧発電装置の開発 (2022 ~ 2023 年度 )
型油圧発電装置の性能を踏まえて実現可能性調査 (FS) を
行い、地域実装の可能性を評価する予定である。なお、本
稿で用いた図については東京大学生産技術研究所からご提
供いただいた。ここに謝意を表す。
技術開発ニュース 2024.03/No.168
80
�
- ▲TOP
- ページ: 82
-
研 究 紹 介
Introductions of Research Activities
未来の医療を目指した細胞凍結保存に関する
共同研究
Joint research on cell cryopreservation for future medical care
~再生医療・創薬の発展を目指して~
再生医療は、細胞・組織など細胞製品を用いることにより、これまで治療困難であった
病気を治す可能性があるため、未来の医療として期待されている。再生医療をより身近
な医療にするためには、本来の機能を有した状態で細胞製品※を凍結保存する技術の開発
が欠かせない。そこで、当社は、国立研究開発法人 医薬基盤・健康・栄養研究所(以下
NIBIOHN)、株式会社菱豊フリーズシステムズ(以下菱豊フリーズ)と再生医療・創薬
の分野における細胞凍結保存の共同研究を実施している。
1
研究の目的・背景
当社は、これまで食材の美味しさを保ちながら強磁界下
執筆者
先端技術応用研究所
先端技術ソリューショングループ
森 秀樹
(2)凍結技術の再検証と凍結条件の最適化
次に開発した凍結機を使用して、スフェロイドなど、こ
れまでに成功している細胞等の凍結を再検証し、開発した
機器によって最適な凍結条件を見極める。
で冷凍する技術の研究開発を菱豊フリーズと共同で進めて
きた。一方、NIBIOHN は、菱豊フリーズ製の凍結機を使用
することで、従来困難であった神経の機能を有した細胞製
品をその機能を損なうことなく生きたまま凍結保存するこ
とを見出した。病気の種類によって治療に用いる細胞製品
第 2 図 細胞製品と医療への適用
は異なるため、それぞれの細胞製品に最適な凍結条件を見
つけられれば、様々な病気に対応でき、医療の世界を一変
させることになる。そこで、3 者は、これまでそれぞれが
第1表 3者の役割分担
培ってきた知見を組み合わせ、細胞製品の凍結条件の最適
化や、これに必要な凍結機の開発に共同で取り組み、再生
医療・創薬の発展に貢献することを目指す。
2
共同研究の内容
(1)凍結装置の磁界最適化
これまでの研究では永久磁石を用いた凍結装置であった
3
応用範囲・将来の展望
が、凍結装置の磁界強度の最適化を図るため、磁界を制御
本研究の社会実装(凍結機の普及および各種の再生医療
できる試験機の開発に取り組む。
等製品の凍結実証)は 4 年後を目指している。
第 3 図 研究のロードマップ
超電導装置 開発機(イメージ)
第 1 図 凍結機器のイメージ
※細胞の集合体であるスフェロイド(単一種の集合体)
、オルガノイド(複
数種の集合体)
、細胞と組織の中間的な状態をとるシート状・かたまり状
の細胞等。
本研究の開発技術は、再生医療を実現する細胞製品の凍
結ストックを可能とし、必要な時に必要な細胞製品を容易
に活用出来るようにする。将来は組織や臓器凍結などに応
用していく。こうした凍結技術を使って誰もが健康長寿で
いきいきとした社会生活をおくるための基盤を提供してい
きたい。
81
技術開発ニュース 2024.03/No.168
�
- ▲TOP
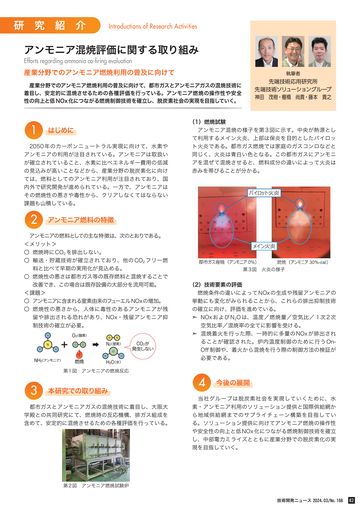
- ページ: 83
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
アンモニア混焼評価に関する取り組み
Efforts regarding ammonia co-firing evaluation
産業分野でのアンモニア燃焼利用の普及に向けて
執筆者
先端技術応用研究所
先端技術ソリューショングループ
神田 茂樹・棚橋 尚貴・藤本 貴之
産業分野でのアンモニア燃焼利用の普及に向けて、都市ガスとアンモニアガスの混焼技術に
着目し、安定的に混焼させるための各種評価を行っている。アンモニア燃焼の操作性や安全
性の向上と低 NOx化につながる燃焼制御技術を確立し、脱炭素社会の実現を目指していく。
1
はじめに
2050 年のカーボンニュートラル実現に向けて、水素や
アンモニアの利用が注目されている。アンモニアは取扱い
が確立されていること、水素に比べエネルギー費用の低減
の見込みが高いことなどから、産業分野の脱炭素化に向け
ては、燃料としてのアンモニア利用が注目されており、国
内外で研究開発が進められている。一方で、アンモニアは
その燃焼性の悪さや毒性から、クリアしなくてはならない
課題も山積している。
2
(1)燃焼試験
アンモニア混焼の様子を第 3 図に示す。中央が熱源とし
て利用するメイン火炎、上部は保炎を目的としたパイロッ
ト火炎である。都市ガス燃焼では家庭のガスコンロなどと
同じく、火炎は青白い色となる。この都市ガスにアンモニ
アを混ぜて混焼させると、燃料成分の違いによって火炎は
赤みを帯びることが分かる。
アンモニア燃料の特徴
アンモニアの燃料としての主な特徴は、次のとおりである。
<メリット>
〇 燃焼時に CO2 を排出しない。
〇 輸送・貯蔵技術が確立されており、他の CO2 フリー燃
料と比べて早期の実用化が見込める。
〇 燃焼性の悪さは都市ガス等の既存燃料と混焼することで
改善でき、この場合は既存設備の大部分を流用可能。
<課題>
〇 アンモニアに含まれる窒素由来のフューエルNOxの増加。
〇 燃焼性の悪さから、人体に毒性のあるアンモニアが残
留や排出される恐れがあり、NOx・残留アンモニア抑
制技術の確立が必要。
第 3 図 火炎の様子
(2)技術要素の評価
燃焼条件の違いによって NOx の生成や残留アンモニアの
挙動にも変化がみられることから、これらの排出抑制技術
の確立に向け、評価を進めている。
➣ NOx および N2O は、温度/燃焼量/空気比/ 1 次 2 次
空気比率/混焼率の全てに影響を受ける。
➣ 混焼着火を行った際、一時的に多量の NOx が排出され
ることが確認された。炉内温度制御のために行う OnOff 制御や、着火から混焼を行う際の制御方法の検証が
必要である。
第 1 図 アンモニアの燃焼反応
3
本研究での取り組み
都市ガスとアンモニアガスの混焼技術に着目し、大阪大
学殿との共同研究にて、燃焼時の反応機構、排ガス組成を
含めて、安定的に混焼させるための各種評価を行っている。
4
今後の展開
当社グループは脱炭素社会を実現していくために、水
素・アンモニア利用のソリューション提供と国際供給網か
ら地域供給網までのサプライチェーン構築を目指してい
る。ソリューション提供に向けてアンモニア燃焼の操作性
や安全性の向上と低 NOx 化につながる燃焼制御技術を確立
し、中部電力ミライズとともに産業分野での脱炭素化の実
現を目指していく。
第 2 図 アンモニア燃焼試験炉
技術開発ニュース 2024.03/No.168
82
�
- ▲TOP
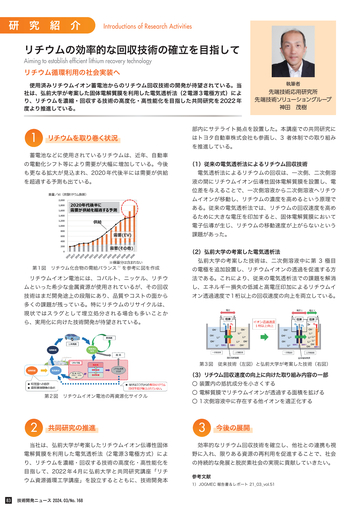
- ページ: 84
-
研 究 紹 介
Introductions of Research Activities
リチウムの効率的な回収技術の確立を目指して
Aiming to establish efficient lithium recovery technology
リチウム循環利用の社会実装へ
使用済みリチウムイオン蓄電池からのリチウム回収技術の開発が待望されている。当
社は、弘前大学が考案した固体電解質膜を利用した電気透析法(2 電源 3 電極方式)によ
り、リチウムを濃縮・回収する技術の高度化・高性能化を目指した共同研究を 2022 年
度より推進している。
1
リチウムを取り巻く状況
蓄電池などに使用されているリチウムは、近年、自動車
の電動化シフト等により需要が大幅に増加している。今後
も更なる拡大が見込まれ、2020 年代後半には需要が供給
を超過する予測も出ている。
執筆者
先端技術応用研究所
先端技術ソリューショングループ
神田 茂樹
部内にサテライト拠点を設置した。本講座での共同研究に
はトヨタ自動車株式会社も参画し、3 者体制での取り組み
を推進している。
(1)従来の電気透析法によるリチウム回収技術
電気透析法によるリチウムの回収は、一次側、二次側溶
液の間にリチウムイオン伝導性固体電解質膜を設置し、電
位差を与えることで、一次側溶液から二次側溶液へリチウ
ムイオンが移動し、リチウムの濃度を高めるという原理で
ある。従来の電気透析法では、リチウムの回収速度を高め
るために大きな電圧を印加すると、固体電解質膜において
電子伝導が生じ、リチウムの移動速度が上がらないという
課題があった。
(2)弘前大学の考案した電気透析法
第 1 図 リチウム化合物の需給バランス 1)を参考に図を作成
リチウムイオン電池には、コバルト、ニッケル、リチウ
ムといった希少な金属資源が使用されているが、その回収
技術はまだ開発途上の段階にあり、品質やコストの面から
多くの課題が残っている。特にリチウムのリサイクルは、
弘前大学の考案した技術は、二次側溶液中に第 3 極目
の電極を追加設置し、リチウムイオンの透過を促進する方
法である。これにより、従来の電気透析法での課題を解消
し、エネルギー損失の低減と高電圧印加によるリチウムイ
オン透過速度で 1 桁以上の回収速度の向上を両立している。
現状ではスラグとして埋立処分される場合も多いことか
ら、実用化に向けた技術開発が待望されている。
第 3 図 従来技術(左図)と弘前大学が考案した技術(右図)
(3)リチウム回収速度の向上に向けた取り組み内容の一部
〇 装置内の抵抗成分を小さくする
第 2 図 リチウムイオン電池の再資源化サイクル
2
共同研究の推進
〇 1 次側溶液中に存在する他イオンを適正化する
3
今後の展開
当社は、弘前大学が考案したリチウムイオン伝導性固体
効率的なリチウム回収技術を確立し、他社との連携も視
り、リチウムを濃縮・回収する技術の高度化・高性能化を
の持続的な発展と脱炭素社会の実現に貢献していきたい。
電解質膜を利用した電気透析法(2 電源 3 電極方式)によ
目指して、2022 年 4 月に弘前大学と共同研究講座「リチ
ウム資源循環工学講座」を設立するとともに、技術開発本
83
〇 電解質膜でリチウムイオンが透過する面積を拡げる
技術開発ニュース 2024.03/No.168
野に入れ、限りある資源の再利用を促進することで、社会
参考文献
1) JOGMEC 報告書 & レポート 21_03_vol.51
�
- ▲TOP
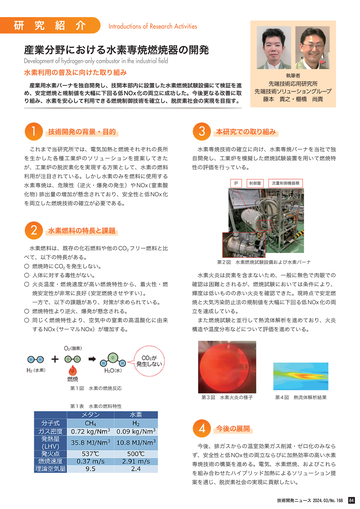
- ページ: 85
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
産業分野における水素専焼燃焼器の開発
Development of hydrogen-only combustor in the industrial field
水素利用の普及に向けた取り組み
執筆者
産業用水素バーナを独自開発し、技開本部内に設置した水素燃焼試験設備にて検証を進
め、安定燃焼と規制値を大幅に下回る低 NOx 化の両立に成功した。今後更なる改善に取
り組み、水素を安心して利用できる燃焼制御技術を確立し、脱炭素社会の実現を目指す。
1
技術開発の背景・目的
3
先端技術応用研究所
先端技術ソリューショングループ
藤本 貴之・棚橋 尚貴
本研究での取り組み
これまで当研究所では、電気加熱と燃焼それぞれの長所
水素専焼技術の確立に向け、水素専焼バーナを当社で独
を生かした各種工業炉のソリューションを提案してきた
自開発し、工業炉を模擬した燃焼試験装置を用いて燃焼特
が、工業炉の脱炭素化を実現する方策として、水素の燃料
性の評価を行っている。
利用が注目されている。しかし水素のみを燃料に使用する
水素専焼は、危険性(逆火・爆発の発生)や NOx( 窒素酸
化物 ) 排出量の増加が懸念されており、安全性と低 NOx 化
を両立した燃焼技術の確立が必要である。
2
水素燃料の特長と課題
水素燃料は、既存の化石燃料や他の CO2 フリー燃料と比
べて、以下の特長がある。
〇 燃焼時に CO2 を発生しない。
第 2 図 水素燃焼試験設備および水素バーナ
〇 人体に対する毒性がない。
水素火炎は炭素を含まないため、一般に無色で肉眼での
〇 火炎温度・燃焼速度が高い燃焼特性から、着火性・燃
確認は困難とされるが、燃焼試験においては条件により、
焼安定性が非常に良好 ( 安定燃焼させやすい )。
輝度は低いものの赤い火炎を確認できた。現時点で安定燃
一方で、以下の課題があり、対策が求められている。
焼と大気汚染防止法の規制値を大幅に下回る低 NOx 化の両
〇 燃焼特性より逆火、爆発が懸念される。
立を達成している。
〇 同じく燃焼特性より、空気中の窒素の高温酸化に由来
また燃焼試験と並行して熱流体解析を進めており、火炎
する NOx(サーマル NOx)が増加する。
構造や温度分布などについて評価を進めている。
第 1 図 水素の燃焼反応
第 3 図 水素火炎の様子
第 4 図 熱流体解析結果
第 1 表 水素の燃料特性
4
今後の展開
今後、排ガスからの温室効果ガス削減・ゼロ化のみなら
ず、安全性と低 NOx 性の両立ならびに加熱効率の高い水素
専焼技術の構築を進める。電気、水素燃焼、およびこれら
を組み合わせたハイブリッド加熱によるソリューション提
案を通じ、脱炭素社会の実現に貢献したい。
技術開発ニュース 2024.03/No.168
84
�
- ▲TOP
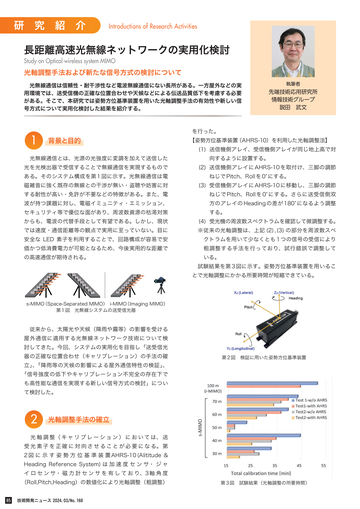
- ページ: 86
-
研 究 紹 介
Introductions of Research Activities
長距離高速光無線ネットワークの実用化検討
Study on Optical wireless system MIMO
光軸調整手法および新たな信号方式の検討について
光無線通信は信頼性・耐干渉性など電波無線通信にない長所がある。一方屋外などの実
用環境では、送受信機の正確な位置合わせや天候などによる伝送品質低下を考慮する必要
がある。そこで、本研究では姿勢方位基準装置を用いた光軸調整手法の有効性や新しい信
号方式について実用化検討した結果を紹介する。
1
背景と目的
光無線通信とは、光源の光強度に変調を加えて送信した
光を光検出器で受信することで無線通信を実現するもので
ある。そのシステム構成を第 1 図に示す。光無線通信は電
執筆者
先端技術応用研究所
情報技術グループ
説田 武文
を行った。
【姿勢方位基準装置(AHRS-10)を利用した光軸調整法】
(1) 送信機側アレイ、受信機側アレイが同じ地上高で対
向するように設置する。
(2) 送信機側アレイに AHRS-10 を取付け、三脚の調節
ねじで Pitch、Roll を 0° にする。
磁雑音に強く既存の無線との干渉が無い・盗聴や妨害に対
(3) 受信機側アレイに AHRS-10 に移動し、三脚の調節
する耐性が高い・免許が不要などの特徴がある。また、電
ねじで Pitch、Roll を 0° にする。さらに送受信側双
波が持つ課題に対し、電磁イミュニティ・エミッション、
方のアレイの Heading の差が 180° になるよう調整
セキュリティ等で優位な面があり、周波数資源の枯渇対策
する。
からも、電波の代替手段として有望である。しかし、現状
(4) 受光機の周波数スペクトラムを確認して微調整する。
では速度・通信距離等の観点で実用に至っていない。目に
※従来の光軸調整は、上記 (2),(3) の部分を周波数スペ
安全な LED 素子を利用することで、回路構成が容易で安
クトラムを用いて少なくとも 1 つの信号の受信により
価かつ低消費電力が可能となるため、今後実用的な距離で
粗調整する手法を行っており、試行錯誤で調整して
の高速通信が期待される。
いる。
試験結果を第 3 図に示す。姿勢方位基準装置を用いるこ
とで光軸調整にかかる所要時間が短縮できている。
s-MIMO(Space-Separated MIMO) i-MIMO(Imaging MIMO)
第 1 図 光無線システムの送受信光器
従来から、太陽光や天候(降雨や霧等)の影響を受ける
屋外通信に適用する光無線ネットワーク技術について検
討してきた。今回、システムの実用化を目指し「送受信光
器の正確な位置合わせ(キャリブレーション)の手法の確
立」、「降雨等の天候の影響による屋外通信特性の検証」、
第 2 図 検証に用いた姿勢方位基準装置
「信号強度の低下やキャリブレーション不完全の存在下で
も高性能な通信を実現する新しい信号方式の検討」につい
て検討した。
2
光軸調整手法の確立
光 軸 調 整( キ ャ リ ブ レ ー シ ョ ン ) に お い て は、 送
受 光 素 子 を 正 確 に 対 向 さ せ る こ と が 必 要 に な る。 第
2 図 に 示 す 姿 勢 方 位 基 準 装 置 AHRS-10(Alititude &
Heading Reference System) は 加 速 度 セ ン サ・ ジ ャ
イ ロ セ ン サ・ 磁 力 計 セ ン サ を 有 し て お り、3 軸 角 度
(Roll,Pitch,Heading)の数値化により光軸調整(粗調整)
85
技術開発ニュース 2024.03/No.168
第 3 図 試験結果(光軸調整の所要時間)
�
- ▲TOP
- ページ: 87
-
研 究 紹 介
3
雨天時における屋外通信特性の検証
【LDPC 符号の特長】
・疎な検査行列によって定義される線形符号
・高い符号化率かつ現実的な計算量で誤り訂正が可能
雨天時には降雨により光路が遮られ信号強度低下が生じ
【シミュレーション内容】
るおそれがある。そのため屋外環境で光無線通信伝送試験
(1) 検査行列の生成
を実施し、降雨による減衰がシステム性能に与える影響を
評価した。試験状況を第 4 図に、試験結果を第 5 図に示す。
検査行列をギャラガーの構成法により生成
(2) LDPC 符号の生成
【結果】
情報シンボル列をランダムに作成し、上記の検査行
・降雨による信号強度の低下が見られビット誤り率特性の
劣化があるが、小雨程度であれば 70m の通信が可能で
列から LDPC 符号化を行う
(3) 受信語の生成
ある。(ビット誤り率は 1×10 以下であり、誤り訂正符
各チャンネルの誤り率に基づきランダムに誤りを与える
-2
号化を行うことで実用可能 )
(4) 送信語の推定
・規格化伝送路行列、行列の大きさ(フロベニウスノル
前記の受信語に対し、検査行列、各尤度に基づき確立
ム)を確認し、降雨の影響は伝搬路行列の各要素を均等
領域 sum-product 復号法により送信語の推定を行う
に低下させる信号減衰であった。
シミュレーション結果を第 6 図に示す。2 種類の符号化
率(R=0.5 , 0.6)の各 2 パターンの計 4 つの検査行列にて
復号を繰り返しビット誤り率の性能改善を確認した。
光変調器台数
光変調器間隔
送信データ速度
対向距離
4[ 台 ]
17.5[cm]
25M×4[bps]
70[m]
第 4 図 屋外試験状況(4×4 s-MIMO)
第 6 図 シミュレーション結果
5
まとめ
姿勢方位基準装置を用いた光軸調整手法の有効性が確認
できた。また、新しい信号方式を利用することで、屋外
第 5 図 試験結果(降雨によるビット誤り率の変化)
通信に対してもビット誤り率の改善を図ることが確認でき
た。本研究により高速長距離光無線の要素技術として有用
4
新しい送信信号と受信方式の検討
性が確認できた。一方で製品化やシステムへの実装、他の
通信技術との経済性等の課題があるため、今後の技術動向
に注目していきたい。
光変調器と伝送距離の増加に伴い、平均誤り率特性劣化
や各送信光器からの信号誤り率特性のばらつき増大が生じ
る。そこで光変調器毎の性能(誤り率特性)が異なり、か
つそれが時間的に大きく変化しないという光無線通信の特
6
あとがき
徴から、光変調器毎のビット誤り率特性を利用した誤り訂
本研究は名古屋大学未来材料・システム研究所片山正昭
正符号化方式として、LDPC(Low-Density Parity Check)
教授、
Chedlia Ben Naila 助教との共同研究により実施した。
符号を検討しシミュレーションで効果を確認した。
技術開発ニュース 2024.03/No.168
86
�
- ▲TOP
- ページ: 88
-
研 究 紹 介
Introductions of Research Activities
エッジコンピューティングを用いた
画像 AI システムの検証
Study on image recognition with edge computing
栽培施設での作業員見守り AI システムの作成
通信遠隔監視に係る通信ネットワークの負荷軽減の一手法として、画像の AI 処理をカ
メラ端末側で行うエッジコンピューティングがある。今回、イチゴ栽培施設における作業
員管理をユースケースに、エッジコンピュータによる画像 AI システムを構築するためカ
メラおよびエッジデバイスの技術要件整理やシステム構成検討を行ったため紹介する。
1
背景・目的
3
執筆者
先端技術応用研究所
情報技術グループ
説田 武文
エッジコンピューティング技術の活用
通信技術の発展やディープラーニングを中心とした画像
エッジコンピューティング技術のユースケースとしてイ
AI 技術の飛躍的な進歩により、遠隔地の画像監視は容易
チゴ栽培施設での作業員見守りシステムを第 1 図に示す。
になり遠隔画像 AI 監視システムが様々な場面で導入されて
栽培施設では広大な敷地の中、多くの作業員の位置や状況
いる。
の把握を実現するため AI を活用した遠隔監視システムを構
また、エッジコンピュータの処理能力が年々向上してお
築した。分散処理を指向したシステムとするためエッジコ
り、遠隔地側での AI 画像処理の分散処理を指向したシステ
ンピュータを活用した構成で検証を行った。
ム構成によりその活用範囲の拡大が期待されている。
2
エッジコンピューティングとは
データの収集や処理をインターネットに接続されたサー
バやデータセンターで行うクラウドコンピューティングに
A
B
対して、ローカルなデバイスやネットワークの端末側で行
うことをエッジコンピューティングという。
大容量のデータを送受信することは、通信ネットワーク
に大きな負荷を与えデータ遅延時間が発生するが、エッ
ジコンピューティングの利用によりエッジコンピュータ側
でのリアルタイムの処理が可能となり、ネットワークの負
第 1 図 栽培施設での作業状況把握(ユースケース)
(1) システム構成
荷軽減につながる。また、エッジコンピュータ側でデータ
イチゴ栽培施設内にカメラ 6 台を設置して、エッジコン
処理することで、プライバシーやセキュリティの面でも利
ピュータで AI 技術の処理を行う、作業員見守りシステム
点がある。エッジコンピュータ本体も小型のマイクロコン
を第 2 図に示す。エッジコンピュータは現地に設置してお
ピュータやシングルボードコンピュータなど数多く市販さ
り、現地のパソコンで直接確認することができる。また、
れて容易に入手することが可能になっている(第 1 表)。
離れた事務所からも確認できるように、モバイルルータを
用いて通信環境を構築した。
第 1 表 エッジコンピューティングの特徴
・リアルタイムな処理が可能
メリット
・分散処理やトラフィックの最適化
・通信コスト削減
・セキュリティ強化・プライバシーの保護
デメリット
・エッジコンピュータ側機器の処理能力に限界
・現場環境に制約
・導入や運用のハードルが高い
(2)主な使用機材
①エッジコンピュータ
NVIDIA 製の Jetson AGX Xavier を用いた。Jetson は
高速演算が可能な GPU 処理を搭載したコンピュータであ
らゆる自律動作のための AI プラットフォームである。ロ
ボットや IoT など組み込み機器向けの開発・研究で使用さ
れており、誰でも先進的なエッジ AI ソリューション開発
に取り組むことができる。従来は AI 開発に高速な演算処理
87
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 89
-
研 究 紹 介
が必要なため、大型でコストが高く、消費電力も非常に高
【個人識別 AI】
い、GPU コンピューティング処理を行う製品が必要でした
人物を検出するだけではなく、ある時刻に検出した作業
が、Jetson を用いることで、安価に GPU コンピューティ
員が、別の時刻に検出した人と同一人物であるか、別の作
ング処理が可能となった。
業員であるかを識別することが望まれる。しかし画像によ
る顔認証などの個人識別を行う仕組みでは、遠くに映って
② カメラ
いる作業員を高い精度で区別することは困難である。
H.VIEW 製の防犯カメラ HV-E800D を用いた。カメラは
このため、画像による識別を容易とするようなマーカー
物体識別を行ううえで一定以上の解像度が必要となる。ま
を各作業員にあらかじめ装着し、その情報を活用して識別
た、近くから遠くまで広いエリアまでピントが合うことが
を行った。今回は色情報をマーカーとして計 9 色のカラー
求めれる。USB カメラや Web カメラの検証を行ったが、
ビブス、カラーキャップを作業員に着用してもらい識別す
USB カメラについては、ピントが合う距離範囲が狭く、遠
る手法を採用した。また、識別精度向上のため事前撮影し
方にピントを合わせた場合、近い距離にはピントが合わな
たアノテーションデータ(計 12,298 枚の画像)で学習を
いことが確認できた。そこで Web カメラのなかでも、で
行い、識別 AI プログラムを作成した。
きるだけ遠方の人物にも AI 推論が可能な機種を選定した。
今回作成したモデルでは、特定の色で誤検出や検出漏れ
また、エッジコンピュータで映像を取り込むための映像
が多いこと、背景色との同化や光/影の影響が大きいこと
配信プロトコルには一般に用いられている RTSP(※ Real
から、9 色を識別することは困難であった。ただし、3 色
Time Streaming Protocol)を利用した。
程度に色数を絞る(例えば、赤、青、黄色)対応や、更な
る学習データの追加を行うことにより、精度向上につなが
ると期待される。
PC
PC
Wi-Fi
Internet
【位置把握】
カメラ映像およびイチゴ栽培施設の平面図の対応する 4
BOX
点を事前に指定しておくことで、カメラで検出した人物の
BOX
PoE-HUB
BOX2
PoE-HUB
SW-HUB
位置を図面上の位置(座標)に射影変換するプログラムを
作成した。位置特定の状況を第 3 図(b)に示す。
検証では検出した人物に対して、ほぼ正しい位置を特定
できていることが確認できた。ただし、検出した人物の足
元が不正確である、すなわち上半身までしか検出できてい
ない場合は、奥行き方向にズレが生じる場合があった。
HDD
第 2 図 システム構成図
(3)ソフトウェア試作と検証
【人物検出 AI】
画像に映っている人物を検出する機能である。物体検知
に用いられている AI 処理はいくつか種類があるが、今回は
(a) 人物検出例 (b) 位置特定例
第 3 図 画像 AI システム動作状況
オープンソースとして一般公開されている YOLOv5 をベー
スとした人物検出モデルを採用した。人物検出の状況を第
3 図(a)に示す。YOLO は You Only Look Once の略で、
処理速度が非常に早い物体検出アルゴリズムの 1 つであ
る。YOLO の物体認識の手法は予め画像全体を正方形のグ
リッドに分割しておき、それぞれのグリッドに対象となる
3
まとめ
物体が含まれているかどうかを判定する特徴がある。この
今回のユースケースにおいてエッジコンピュータ
YOLO の AI モデル(人物検知モデル)に加え、イチゴ栽培
(Jetson)が人物検出・位置把握を行うのに十分処理可能
施設で撮影した人物画像を元に学習を行った。イチゴ栽培
な能力であることを確認した。認識精度においては撮影し
施設の検証において、かなりの精度で人物検出が可能であ
た画像のばらつきにより左右されるため、画像以外のデー
ることを確認した。
タ収集デバイスを活用して画像 AI と組み合わせを考慮する
ことで、さらなる精度向上を目指していきたい。
技術開発ニュース 2024.03/No.168
88
�
- ▲TOP
- ページ: 90
-
研 究 紹 介
Introductions of Research Activities
ダム揚圧力遠隔計測システムの開発
Development of dam uplift pressure remote measurement system
費用対効果を考慮した電力インフラ現場の DX 推進支援
執筆者
多くの現場において,費用対効果から DX 推進が実現しないことがあり、電力インフラ
でも同様である。今回の揚圧力遠隔計測システムでは、汎用的なマイコンデバイスや通信
機器、オープンソースソフトウェアの活用による低コスト化にて費用対効果を改善した柔
軟な試作システムを構築した。
1
背景・目的
先端技術応用研究所
情報技術グループ
志水 洋・中村 剛
PC
DX 推進には一定の費用対効果を期待する。今回紹介す
る再生可能エネルギーカンパニーの揚圧力 ( ※ ) 遠隔計測
システムは、稼働頻度の低さから、この点を満たすことが
難しかった。
厳しい作業環境や国土交通省への報告業務から業務廃止
が困難な中、システム化要望は強く、昨今の技術進化によ
device001
device010
(10
る汎用的なマイコンデバイス等の低廉化やオープンソース
ソフトウェアの利用可能な環境を鑑み、費用対効果の水準
01
)
10
に合わせた導入コストの内製システムを試作・検証した。
※揚圧力とはダム堤体を浮き上がらせようとする浸透水の
第 1 図 揚圧力計測システム
圧力のこと
2
揚圧力計測の概要と課題
(1) ネットワーク構成
システムの全体構成を第 2 図に示す。
揚圧力の計測作業は、監査廊の 76 箇所の計測点のバル
社内 PC、クラウド、ダム管理事務所はインターネット
ブを閉め、2 時間後に計測を行う。計測と同時に、計測が
に接続。監査廊内は、Wi-Fi 設置の事前検証を実施。検証
終わったバルブは開いた状態に戻す。
結果を踏まえて、通信品質確保のためアクセスポイントを
監査廊は、非常に長い急階段で、複数回往復する揚圧力
5 か所に設置した。
計測は大変な重労働である。計測点によっては、計測しづら
い場所に設置されており、安全性での懸念もある。監査廊内
(2) ソフトウェア構成と開発
は携帯電波が通じず、緊急の外部連絡が必要な場合でも、
地上に戻る必要があり迅速な対応が困難な場所であった。
揚圧力遠隔計測システムの開発にあたり、最大限にオー
そのため、以前からシステム化が望まれていたが、年 4 回
プンソースソフトウェア(OSS)を活用した。
の利用と稼働頻度の低さからシステム化が見送られてきた。
ダッシュボードの開発に利用した OSS を第 1 表に示す。
各サービスをコンテナ管理することで、クラウド用と管理
3
システム概要
揚圧力計測の指示および計測結果の閲覧は、社内 PC およ
びダム管理事務所からダッシュボードで行う。計測開始指
示により、電動弁をクローズする。計測値はクラウドと管
理事務所のダッシュボードに表示される。計測終了時は、
タイマにより自動的に電動弁がオープンする。
(第 1 図)
89
技術開発ニュース 2024.03/No.168
事務所用でサービス定義を共通化し、コスト削減を図った。
計測ボックス開発に利用した OSS を第 2 表に示す。マイ
コンライブラリが充実しており、入門者にも扱いやすいマ
イコン開発環境を利用することで、コスト削減を図った。
�
- ▲TOP
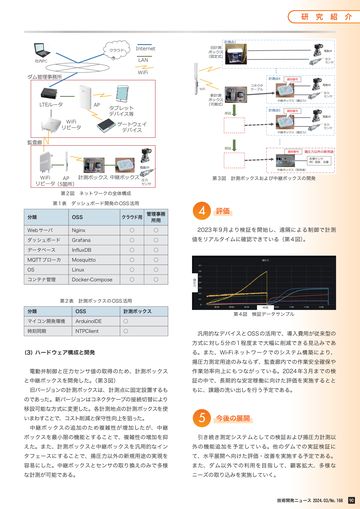
- ページ: 91
- 1
Internet
LAN
PC
…
WiFi
4
WiFi
LTE
AP
5
WiFi
…
研 究 紹 介
WiFi
5
第 3 図 計測ボックスおよび中継ボックスの開発
AP
第 2 図 ネットワークの全体構成
第 1 表 ダッシュボード開発の OSS 活用
4
評価
分類
OSS
クラウド用
管理事務
所用
Web サーバ
Nginx
○
○
2023 年 9 月より検証を開始し、遠隔による制御で計測
ダッシュボード
Grafana
○
○
値をリアルタイムに確認できている(第 4 図)。
データベース
InfluxDB
○
○
MQTT ブローカ
Mosquitto
○
○
OS
Linux
○
○
コンテナ管理
Docker-Compose
○
○
第 2 表 計測ボックスの OSS 活用
分類
OSS
計測ボックス
マイコン開発環境
ArduinoIDE
○
時刻同期
NTPClient
○
第 4 図 検証データサンプル
汎用的なデバイスと OSS の活用で、導入費用が従来型の
方式に対し 5 分の 1 程度まで大幅に削減できる見込みであ
(3) ハードウェア構成と開発
る。また、Wi-Fi ネットワークでのシステム構築により、
揚圧力測定用途のみならず、監査廊内での作業安全確保や
電動弁制御と圧力センサ値の取得のため、計測ボックス
作業効率向上にもつながっている。2024 年 3 月までの検
と中継ボックスを開発した。(第 3 図)
証の中で、長期的な安定稼働に向けた評価を実施するとと
旧バージョンの計測ボックスは、計測点に固定設置するも
もに、課題の洗い出しを行う予定である。
のであった。新バージョンはコネクタケーブの接続切替により
移設可能な方式に変更した。各計測地点の計測ボックスを使
いまわすことで、コスト削減と保守性向上を狙った。
中継ボックスの追加のため複雑性が増加したが、中継
5
今後の展開
ボックスを最小限の機能とすることで、複雑性の増加を抑
引き続き測定システムとしての検証および揚圧力計測以
えた。また、計測ボックスと中継ボックスを汎用的なイン
外の機能追加を予定している。他のダムでの実証検証に
タフェースにすることで、揚圧力以外の新規用途の実現を
て、水平展開へ向けた評価・改善を実施する予定である。
容易にした。中継ボックスとセンサの取り換えのみで多様
また、ダム以外での利用を目指して、顧客拡大、多様な
な計測が可能である。
ニーズの取り込みを実施していく。
技術開発ニュース 2024.03/No.168
90
�
- ▲TOP
- ページ: 92
-
研 究 紹 介
Introductions of Research Activities
将来の電力設備工事に関わる BIM/CIM 導入に
向けた課題
Challenges Towards the Implementation of BIM/CIM for Future Electrical Facility Construction
配電建設業務に関わる 3D データ取得・更新技術とその課題解決への
見通し
執筆者
先端技術応用研究所
情報技術グループ
難波 隆博
本稿は、3D データの活用による電力設備業務の効率化と高度化に焦点を当てる。具体
的には、配電業務への BIM/CIM の導入に必要となる 3D データ構築に関わる課題につい
て記述する。特に、設備および周辺環境のデータ取得や 3D モデルの作成・更新が課題と
して挙げられる。
1
背景・目的
3
配電業務への BIM/CIM 適用と検討課題
電力設備(例:配電設備)の建設や保守業務において
第 2 図に示されているように、配電業務(建設工事)を
は、主に 2 次元データに基づく、一連の業務が構築されて
ユースケースとして、BIM/CIM の適用概念を検討した。
いる。一方で、建設業界では、3 次元(3D)データを活
この中で、現行の 2 次元データを 3 次元データに変換し、
用 し た BIM/CIM(Building / Construction Information
3D モデルと設備情報を統合して BIM/CIM モデルを作成
Modeling, Management)の導入とこれによる効率化が
する。これらのデータは 3D 情報管理基盤を通じて活用さ
進んでおり、その活用が注目されている。
れ、視覚的な情報により関係者間での情報共有が早期に実
そこで本研究では、建設業界の BIM/CIM の導入事例を
現可能となり、直列的な工程を複数者(社)での同時進行
参考に、電力業務のユースケースとして配電業務(建設工
事)に対する BIM/CIM の適用可能性と、その導入に必要
工事業務フロー
となる 3D データ整備に関わる課題を整理していく。
データ取得・更新機会
なお、本稿で 3D データという用語は、3D モデル(BIM/
CIM を含む)と 3D 点群データを含む総称として使用して
いる。
2
受付
BIM/CIM の概要
BIM/CIM は、3D モデルと属性情報を組み合わせたもの
である。その概念は第 1 図に示されている。3D モデルと
調査
調査
・
設計
周辺環境データ
(3Dデータ)
3Dモデル
作成
は、建築物や設備を立体的に表現したデジタルデータのこ
ダウンロード
モデル登録
3Dモデル活用
3
とで、属性情報とは、設備の種類、仕様、製造および施工
設計
日などの詳細情報を指す。これらの情報を組み合わせるこ
(離隔確認等)
とで、物理的な形状だけでなく、設備の機能や役割を把握
登録
決定登録
ダウンロード
することが可能となる。
3Dモデル活用
工事計画
(部材選定等)
属性追加
登録
ダウンロード
検査結果
(3Dデータ)
施工
第 1 図 BIM/CIM の概念
出典:国土交通省 BIM/CIM 活用ガイドライン(案)令和 4 年 3 月
91
技術開発ニュース 2024.03/No.168
属性追加
登録
送電
第 2 図 配電業務への BIM/CIM 適用概念
3D
�
- ▲TOP
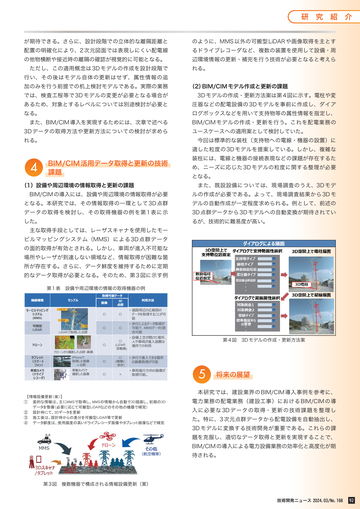
- ページ: 93
-
研 究 紹 介
が期待できる。さらに、設計段階での立体的な離隔距離と
のように、MMS 以外の可搬型 LiDAR や画像取得を主とす
配置の明確化により、2 次元図面では表現しにくい配電線
るドライブレコーダなど、複数の装置を使用して設備・周
の他物横断や接近時の離隔の確認が視覚的に可能となる。
辺環境情報の更新・補完を行う技術が必要となると考えら
ただし、この適用概念は 3D モデルの作成を設計段階で
れる。
行い、その後はモデル自体の更新はせず、属性情報の追
加のみを行う前提での机上検討モデルである。実際の業務
では、検査工程等で 3D モデルの変更が必要となる場合が
(2)BIM/CIM モデル作成と更新の課題
3D モデルの作成・更新方法案は第 4 図に示す。電柱や変
あるため、対象とするレベルについては別途検討が必要と
圧器などの配電設備の 3D モデルを事前に作成し、ダイア
なる。
ログボックスなどを用いて支持物等の属性情報を指定し、
また、BIM/CIM 導入を実現するためには、次章で述べる
BIM/CIM モデルの作成・更新を行う。これを配電業務の
3D データの取得方法や更新方法についての検討が求めら
ユースケースへの適用案として検討していた。
れる。
今回は標準的な装柱(支持物への電線・機器の設置)に
適した粒度の 3D モデルを提案している。しかし、複雑な
BIM/CIM 活用データ取得と更新の技術
課題
4
(1)設備や周辺環境の情報取得と更新の課題
装柱には、電線と機器の接続表現などの課題が存在するた
め、ニーズに応じた 3D モデルの粒度に関する整理が必要
となる。
また、既設設備については、現場調査のうえ、3D モデ
BIM/CIM の導入には、設備や周辺環境の情報取得が必要
ルの作成が必要である。よって、現場調査結果から 3D モ
となる。本研究では、その情報取得の一環として 3D 点群
デルの自動作成が一定程度求められる。例として、前述の
データの取得を検討し、その取得機器の例を第 1 表に示
3D 点群データから 3D モデルへの自動変換が期待されてい
した。
るが、技術的に難易度が高い。
主な取得手段としては、レーザスキャナを使用したモー
ビルマッピングシステム(MMS)による 3D 点群データ
の面的取得が有効とされる。しかし、車両が進入不可能な
場所やレーザが到達しない領域など、情報取得が困難な箇
所が存在する。さらに、データ鮮度を維持するために定期
的なデータ取得が必要となる。そのため、第 3 図に示す例
第 1 表 設備や周辺環境の情報の取得機器の例
3D
•
(MMS)
•
LiDAR
MMS
LiDAR
•
(LiDAR
iPhone
第 4 図 3D モデルの作成・更新方法案
)
•
(
)
×
5
•
将来の展望
本研究では、建設業界の BIM/CIM 導入事例を参考に、
MMS
MMS
LiDAR
3D
3D
LiDAR
3D
電力業務の配電業務(建設工事)における BIM/CIM の導
入に必要な 3D データの取得・更新の技術課題を整理し
た。特に、3 次元点群データから配電設備を自動抽出し、
3D モデルに変換する技術開発が重要である。これらの課
題を克服し、適切なデータ取得と更新を実現することで、
MMS
BIM/CIM の導入による電力設備業務の効率化と高度化が期
待される。
3D
3
D
/
第 3 図 複数機器で構成される情報設備更新(案)
技術開発ニュース 2024.03/No.168
92
�
- ▲TOP
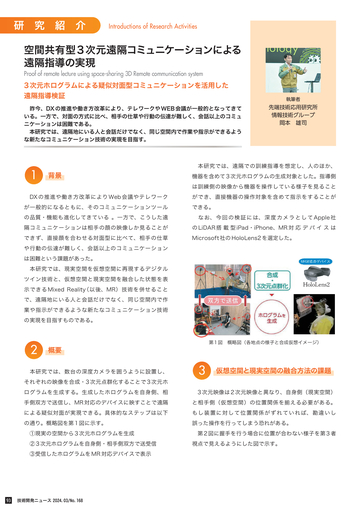
- ページ: 94
-
研 究 紹 介
Introductions of Research Activities
空間共有型3 次元遠隔コミュニケーションによる
遠隔指導の実現
Proof of remote lecture using space-sharing 3D Remote communication system
3 次元ホログラムによる疑似対面型コミュニケーションを活用した
遠隔指導検証
昨今、DX の推進や働き方改革により、テレワークや WEB 会議が一般的となってきて
いる。一方で、対面の方式に比べ、相手の仕草や行動の伝達が難しく、会話以上のコミュ
ニケーションは困難である。
本研究では、遠隔地にいる人と会話だけでなく、同じ空間内で作業や指示ができるよう
な新たなコミュニケーション技術の実現を目指す。
1
背景
執筆者
先端技術応用研究所
情報技術グループ
岡本 雄司
本研究では、遠隔での訓練指導を想定し、人のほか、
機器を含めて 3 次元ホログラムの生成対象とした。指導側
は訓練側の映像から機器を操作している様子を見ること
DX の推進や働き方改革により Web 会議やテレワーク
ができ、直接機器の操作対象を含めて指示をすることが
が一般的になるともに、そのコミュニケーションツール
できる。
の品質・機能も進化してきている 。一方で、こうした遠
な お、 今 回 の 検 証 に は、 深 度 カ メ ラ と し て Apple 社
隔コミュニケーションは相手の顔の映像しか見ることが
の LiDAR 搭 載 型 iPad・iPhone、MR 対 応 デ バ イ ス は
できず、直接顔を合わせる対面型に比べて、相手の仕草
Microsoft 社の HoloLens2 を選定した。
や行動の伝達が難しく、会話以上のコミュニケーション
は困難という課題があった。
本研究では、現実空間を仮想空間に再現するデジタル
ツイン技術と、仮想空間と現実空間を融合した状態を表
HoloLens2
示できる Mixed Reality(以後、MR)技術を併せること
で、遠隔地にいる人と会話だけでなく、同じ空間内で作
業や指示ができるような新たなコミュニケーション技術
の実現を目指すものである。
2
本研究では、数台の深度カメラを囲うように設置し、
それぞれの映像を合成・3 次元点群化することで 3 次元ホ
3
仮想空間と現実空間の融合方法の課題
ログラムを生成する。生成したホログラムを自身側、相
3 次元映像は 2 次元映像と異なり、自身側(現実空間)
手側双方で送信し、MR 対応のデバイスに映すことで遠隔
と相手側(仮想空間)の位置関係を揃える必要がある。
による疑似対面が実現できる。具体的なステップは以下
も し 装 置 に 対 し て 位 置 関 係 が ず れ て い れ ば、 勘 違 い し
の通り。概略図を第 1 図に示す。
誤った操作を行ってしまう恐れがある。
①現実の空間から 3 次元ホログラムを生成
第 2 図に握手を行う場合に位置が合わない様子を第 3 者
② 3 次元ホログラムを自身側・相手側双方で送受信
視点で見えるようにした図で示す。
③受信したホログラムを MR 対応デバイスで表示
93
第 1 図 概略図(各地点の様子と合成仮想イメージ)
概要
技術開発ニュース 2024.03/No.168
�
- ▲TOP
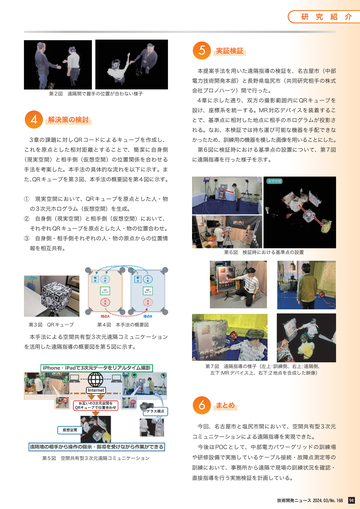
- ページ: 95
-
研 究 紹 介
5
実証検証
本提案手法を用いた遠隔指導の検証を、名古屋市(中部
電力技術開発本部)と長野県塩尻市(共同研究相手の株式
第 2 図 遠隔間で握手の位置が合わない様子
4
解決策の検討
会社プロノハーツ)間で行った。
4 章に示した通り、双方の撮影範囲内に QR キューブを
設け、座標系を統一する。MR 対応デバイスを装着するこ
とで、基準点に相対した地点に相手のホログラムが投影さ
れる。なお、本検証では持ち運び可能な機器を手配できな
3 章の課題に対し QR コードによるキューブを作成し、
かったため、訓練用の機器を模した画像を用いることにした。
これを原点とした相対距離とすることで、簡潔に自身側
第 6 図に検証時における基準点の設置について、第 7 図
(現実空間)と相手側(仮想空間)の位置関係を合わせる
に遠隔指導を行った様子を示す。
手法を考案した。本手法の具体的な流れを以下に示す。ま
た、
QR キューブを第 3 図、本手法の概要図を第 4 図に示す。
① 現実空間において、QR キューブを原点とした人・物
の 3 次元ホログラム(仮想空間)を生成。
② 自身側(現実空間)と相手側(仮想空間)において、
それぞれ QR キューブを原点とした人・物の位置合わせ。
③ 自身側・相手側それぞれの人・物の原点からの位置情
報を相互共有。
第 6 図 検証時における基準点の設置
第 3 図 QR キューブ 第 4 図 本手法の概要図
本手法による空間共有型 3 次元遠隔コミュニケーション
を活用した遠隔指導の概要図を第5図に示す。
第 7 図 遠隔指導の様子(左上 : 訓練側、右上 : 遠隔側、
左下 :MR デバイス上、右下 :2 地点を合成した映像)
6
まとめ
今回、名古屋市と塩尻市間において、空間共有型 3 次元
コミュニケーションによる遠隔指導を実現できた。
今後は POC として、中部電力パワーグリッドの訓練場
第 5 図 空間共有型 3 次元遠隔コミュニケーション
や研修設備で実施しているケーブル接続・故障点測定等の
訓練において、事務所から遠隔で現場の訓練状況を確認・
直接指導を行う実施検証を計画している。
技術開発ニュース 2024.03/No.168
94
�
- ▲TOP
- ページ: 96
-
研 究 紹 介
Introductions of Research Activities
生成系 AI を用いた議事録作成支援技術
Supporting Meeting Minutes Creation Using Generative AI
会議の動画・音声データから簡易議事録を自動作成
執筆者
会議や打合せが開催された際、議事録を作成する機会は多い。また近年は Web 会議の
普及等を背景に会議の録音・録画データの入手が容易になっている。こうした点に着目し
開発した、音声認識 AI と話題の生成系 AI を組み合わせ、会議の音声データをもとに簡易
な議事録を自動作成する技術、およびアプリについて紹介する。
1
はじめに
会議や打合せが行われた際、業務記録や参加者・関係者
先端技術研究所
情報技術グループ
追良瀬 利也
① 会議音声の前処理と音声認識 AI による文字起こし
② 生成系 AI による文字起こしデータの修正(整文)
③ 生成系 AI による整文後データの要約
③の結果が会議の簡易的な議事録となることから、ユー
への共有を目的として、議事録を作成する機会は多く、
ザはこれをもとに議事録を作成することで、大幅な議事録
作成する担当者へは多大な負荷がかかっている。また近年
作業時間の短縮が可能となる。
ではスマートフォンを中心としたデジタル機器の普及や、
Web 会議が一般化していることもあり、会議の録音・録画
データの入手が容易になってきている。
こうした点に着目し、近年発達が著しい生成系 AI と音声
3
会議音声の前処理および文字起こし
認識 AI を組合せ、会議の録画・録音データをもとに、簡易
本項では、会議の録画・録音データをもとに文字起こし
的な議事録を作成する議事録作成支援アプリを開発した。
結果を作成するまでの処理内容を解説していく。
本稿では開発したアプリの概要や内部で行っている処理内
容について紹介していく。
(1) 会議音声の前処理
ユーザがアップロードしたデータを音声認識 AI に入力
するため、以下の手順で前処理を行う。
2
議事録作成支援アプリの概要
① 音声の抽出
ユーザがアップロードした、データが Web 会議の
レコーディングデータなどの動画ファイルであった場
本アプリは社内専用の Web アプリケーションとして開
合、音声認識 AI にそのまま入力することは出来ないた
発しており、社用 PC からブラウザを用いてアクセスでき
め、音声のみを抽出し音声ファイル形式に変換する。
る。開発したアプリ画面を第 1 図に示す。
② 無音部分の削除
音声認識 AI の認識精度向上のため、録音開始から会
議が開始するまで、また会議が終了してから録音が終
了するまでの無音(雑音を含む)時間を削除する。
③ 音声の分割
1 時間を超える会議音声などはそのまま音声認識 AI
に入力出来ないため、一定の間隔で音声を分割する。
これを音声認識 AI に入力するデータとする。
(2) 音声認識 AI による文字起こし
95
第 1 図 議事録作成支援アプリ画面
(1) 項で準備したデータを用いて、音声認識 AI にて文
ユーザは Web 会議のレコーディングデータやスマート
発・公開している Whisper というモデルを用いている。
フォンで録音した会議の音声データをアップロードし、要
このモデルは英語や日本語を含む 68 万時間分の音声
約方法を指定した後、スタートボタンを押すだけで処理が
データで学習されており、高い精度で音声の文字起こし
始まる仕組みとなっている。議事録作成支援アプリ内にお
が可能となっている
ける大まかな処理の流れは以下①~③の通りである。処理
することにより、1 時間ほどの音声が 3 分ほどで文字起
終了後、ユーザは各処理の結果をダウンロードすることが
こし後のテキストデータに変換され、後に続く整文処理
出来る。それぞれの処理内容の詳細は 3,4 章にて解説する。
に渡される。
技術開発ニュース 2024.03/No.168
字起こしを行う。音声認識 AI には、米 OpenAI 社が開
。本アプリからこのモデルを利用
(1)
�
- ▲TOP

- ページ: 97
-
研 究 紹 介
4
生成系 AI による整文・要約
て要約させ、最後に繋ぎ合わせている。
本項では、文字起こし後のデータをもとに、生成系 AI を
用いた文字起こし結果の修正(整文)・要約処理の内容に
ついて解説していく。本アプリでは整文・要約処理に、米
OpenAI 社が開発した大規模⾔語モデル、GPT-4 を用いて
いる。GPT-4 は近年話題となった ChatGPT と呼ばれる AI
第 3 図 要約用プロンプト一例
(3) 整文・要約例
最後に、簡単な文字起こし例を用いて、本アプリで整
チャットサービス内で用いられており、執筆時点で様々な
文・要約した結果を第 1 表に示す。要約方法は箇条書き
ベンチマークで最高の性能を出している最先端のモデルの
を指定した。整文処理では誤字等の修正やケバの削減、
。このモデルではユーザのプロンプト(入力
要約処理では大幅な文字数の削減が行われていることが
一つである
(2)
文章)に応じて、日常会話や文書作成、翻訳等、入力内容
確認出来る。
に応じた様々なテキスト生成が可能である。また、GPT-4
では入出力の文字数 ( 注 1) が制限されていることから、本ア
プリ内で文字起こし結果・整文後結果をそれぞれ一定文字
第 1 表 アプリによる処理結果例
項目
数に分割した後、使用している。
( 注 1)
開発した議事録はく製支援アプリのことを説明します。うん。
このアプリでは、懐疑の音声データをもとに、議事録作成を支援する簡易議事録を作成するこ
正確には「トークン」と呼ばれる、単位テキストを分割する最小単位を用
いて制限されている。日本語の場合、ひらがな 1 文字で約 1 トークン、英
語の場合 1 単語で約 1 トークンなど、⾔語や文字によって数え方が異なる。
とが出来ます。
具体的な処理としては、音声データから音声認識 AIのWhisperで文字起こしを行い、その後
文字
起こし例
果ガダウンロード出来ます。
がサクゲ出来ます。
えー、感嘆ですが以上で説明します。ありがとうございました。
のー」「ああ」「うんうん」等のケバやフィラーと呼ばれ
えー、聞こえますか。聞こえます。お疲れさまです。追良瀬です。あー、今日の議題ですが、
る、文脈上意味を持たない⾔葉が多く含まれている。ま
開発した議事録作製支援アプリのことを説明します。
このアプリでは、会議の音声データをもとに、議事録作成を支援する簡易議事録を作成するこ
た、文脈上意味の通らない漢字変換も含まれる。例え
とが出来ます。具体的な処理としては、音声データから音声認識 AIのWhisperで文字起こし
を行い、その後生成系 AIであるGPT-4を使った文字起こし結果の修正、そして修正結果の要
整文後
約を行います。
ユーザはデータをアップロードした後、要約方法の指定をして、スタートボタンを押すだけで
処理を開始することが出来ます。処理が終わったら、ダウンロードボタンが表示されるので、
これを押すことで各処理の結果がダウンロード出来ます。
し結果が多く含まれていると、意図しない結果となるな
ユーザは要約結果をもとに、適宜修正を加えるだけで議事録を作成でき、議事録作成の時間
が削減出来ます。
ど生成系 AI による要約結果に悪影響を及ぼすため、意味
以上がアプリの説明です。ありがとうございました
の通った文章に修正する、整文処理を行う。
整文処理を行うため、GPT-4 に与えるプロンプト(生成
理を開始することが出来ます。
ユーザは要約結果をもとに、適宜修正を加えるだけで議事録を作成でき、記事六作成の時間
文字起こし後のテキストデータには、「えーと」「あ
は改めた方が良い」となる等である。こうした文字起こ
生成系 AIであるGPT-4を使った文字起こし結果の修正、そして修正結果の要約を行います。
ユーザはエータをアップロードした後、要約方法の指定をして、スタートボタンを押すだけで処
えー、処理が終わったら、ダウンロードボタンが洗われるので、これを押すことで各処理の結
(1) 文字起こし結果の整文
ば、「その行動は改めた方が良い」が誤って「その公道
内容
えー、聞こえますか。聞こえます。お疲れさまです。追良瀬です。あー、今日の議題ですが、
- 本日の議題:開発した議事録作製支援アプリの説明
要約後
系 AI に与える命令文)を第 2 図に示す。プロンプト中の
- アプリの機能:会議の音声データを元に、簡易議事録を作成
- 処理の流れ:音声データからWhisperによる文字起こし → GPT-4による修正 → 要約
- ユーザの操作:データアップロード → 要約方法の指定 → 処理開始 → 結果のダウンロード
- 利点:要約結果を元に修正を加えるだけで議事録作成可能、議事録作成の時間削減が可能。
{ 分割後文章 }となっている部分に分割した文字起こし結果
を入力し、当該プロンプトを用いてGPT-4 により整文さ
れた結果を繋ぎ合わせ、後に続く要約処理に入力する。
5
おわりに
本稿では議事録作成の負荷軽減を目的に、近年話題の生
成系 AI と音声認識 AI を組み合わせ開発した、議事録作成
支援アプリを紹介した。本アプリは昨年から社内の一部部
第 2 図 整文用プロンプト
(2) 整文結果の要約
GPT-4 によって整文された文字起こし結果を簡易的な
署に対して公開しており、使用者からは概ね良好な評価を
得ている。今後も本アプリの改良やその他生成系 AI の業務
適用方法の検討を続け、様々な業務を効率化する研究開発
を続けていきたい。
議事録とするため、整文と同様 GPT-4 を用いて要約をし
ていく。本アプリ内では要約方法を指定(箇条書きか文
章形式)できるようにしており、文章形式の場合、目安
となる文字数も指定することが出来る。
要約処理を行うため、GPT-4 に与えるプロンプト例を
第 3 図に示す。この例は文章形式で文字数を指定しない
場合のものである。整文時と同様、{ 分割後文章 } となっ
6
参考文献
(1)“Introducing Whisper”, Research | OpenAI, https://openai.com/
research/whisper, ( 参照 2024-01-15)
(2)“GPT-4”, Research | OpenAI, https://openai.com/research/gpt-4, ( 参 照
2024-01-15)
ている部分に、一定文字数で分割した整文結果を入力し
技術開発ニュース 2024.03/No.168
96
�
- ▲TOP
- ページ: 98
-
研 究 紹 介
Introductions of Research Activities
ドローン ×AI による鉄塔の錆判定技術
Rust Detection on Iron Towers Using UAVs and AI
ドローンによる鉄塔撮影画像から錆検出 & 進行度判定
執筆者
当社グループの送電鉄塔点検では、高所作業による目視確認から、ドローンの自動飛
行・撮影で取得した画像判定への置き換えが進んでいる。一方で大量の画像を確認する
手間が発生している課題に対して、点検者のサポートを行う様々な AI 技術の研究開発を
行っている。本稿ではその中でも錆検出と錆の進行度判定を行う技術について紹介する。
1
はじめに
検出前
先端技術研究所
情報技術グループ
追良瀬 利也
検出後
従来の送電鉄塔の点検業務では、鉄塔上での感電、高所
からの墜落といった災害リスクや、少子高齢化による点
検作業員確保が課題となっている。そこで、数年前よりド
ローンの自動飛行技術の研究開発を進め、簡単な操作で鉄
塔を自動撮影するドローンの自動飛行システム(1) を開発
第 1 図 錆検出結果イメージと進行度別割合表示例
してきた。当該システムの導入により、簡単な操作で高精
細な鉄塔の画像を取得し、鉄塔に昇らずとも画像を確認す
ることで外観点検の実施が可能となってきている。
一方で、自動撮影された鉄塔の画像は鉄塔 1 基あたり
3
鉄塔錆検出 AI の詳細
100 枚近い数となり、一枚一枚細部を確認する作業は、点
本項では、自動撮影された実際の鉄塔画像の例を用い
検者への一定の負担となっている。そこで、ドローンが取
て、鉄塔錆検出 AI の各ステップ詳細を説明していく。今回
得した画像に対し、AI 技術を活用した異常検出など点検者
説明に用いる鉄塔画像例を第 2 図に示す。
のサポートが実現出来れば、画像の確認時間の削減や見逃
し防止が図れ、一層の効率化が期待出来る。
こうした背景により様々な AI 技術の研究開発を進めてい
る。本稿では、その中でも鉄塔の錆判定を行う AI 技術につ
いて紹介していく。
2
鉄塔錆検出 AI の概要
今回紹介する鉄塔錆検出 AI は、前述のドローン自動撮影
による写真データをもとに、鉄塔の錆領域の検出から錆の
進行度合いの判定までを行うものである。点検者に発錆箇
所の視認性を高めるよう、錆の進行度に応じて、色別に表
示出来るようになっている。また錆の進行度別に割合表示
も可能であり、これらの結果から、鉄塔の錆判定のサポー
トや鉄塔の塗装計画策定に活用できる(第 1 図)。
鉄塔錆検出 AI は、大きく分けて以下に示す 3 つの処理で
成り立っている。
第 2 図 自動撮影による鉄塔画像例
(1) 鉄塔部材の抽出
最初の処理では、第 2 図のような鉄塔画像に対して、
ピクセル単位で背景を切抜く AI 技術を用いて、鉄塔の部
① 鉄塔部材の抽出
材(鉄骨部分)のみを抽出する処理を行っている。この
③ 錆進行度の判定
出することを予防する他、鉄塔の錆領域が全体の何割を
② 錆領域の抽出
それぞれの処理の詳細について、3 章にて説明する。
処理は、後に続く錆領域抽出の AI 処理で背景などを誤検
占めているか計算を行うための元データとして使うため
に行う。当該処理によって今回の画像例を対象に鉄塔部
材抽出を行った画像を第 3 図に示す。背景である田畑や
側溝などが除去されている様子が確認できる。
97
技術開発ニュース 2024.03/No.168
�
- ▲TOP
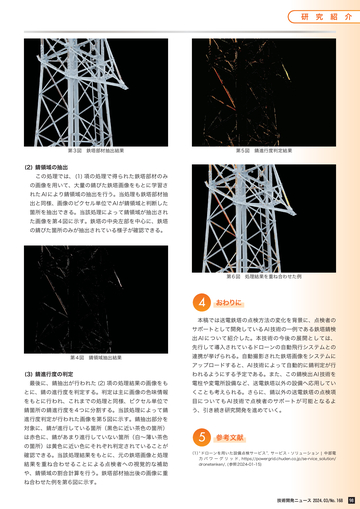
- ページ: 99
-
研 究 紹 介
第 3 図 鉄塔部材抽出結果
第 5 図 錆進行度判定結果
(2) 錆領域の抽出
この処理では、(1) 項の処理で得られた鉄塔部材のみ
の画像を用いて、大量の錆びた鉄塔画像をもとに学習さ
れた AI により錆領域の抽出を行う。当処理も鉄塔部材抽
出と同様、画像のピクセル単位で AI が錆領域と判断した
箇所を抽出できる。当該処理によって錆領域が抽出され
た画像を第 4 図に示す。鉄塔の中央左部を中心に、鉄塔
の錆びた箇所のみが抽出されている様子が確認できる。
第 6 図 処理結果を重ね合わせた例
4
おわりに
本稿では送電鉄塔の点検方法の変化を背景に、点検者の
サポートとして開発している AI 技術の一例である鉄塔錆検
出 AI について紹介した。本技術の今後の展開としては、
先行して導入されているドローンの自動飛行システムとの
第 4 図 錆領域抽出結果
(3) 錆進行度の判定
連携が挙げられる。自動撮影された鉄塔画像をシステムに
アップロードすると、AI 技術によって自動的に錆判定が行
われるようにする予定である。また、この錆検出 AI 技術を
最後に、錆抽出が行われた (2) 項の処理結果の画像をも
電柱や変電所設備など、送電鉄塔以外の設備へ応用してい
とに、錆の進行度を判定する。判定は主に画像の色味情報
くことも考えられる。さらに、錆以外の送電鉄塔の点検項
をもとに行われ、これまでの処理と同様、ピクセル単位で
目についても AI 技術で点検者のサポートが可能となるよ
錆箇所の錆進行度を 4 つに分割する。当該処理によって錆
う、引き続き研究開発を進めていく。
進行度判定が行われた画像を第 5 図に示す。錆抽出部分を
対象に、錆が進行している箇所(黒色に近い茶色の箇所)
は赤色に、錆があまり進行していない箇所(白~薄い茶色
の箇所)は黄色に近い色にそれぞれ判定されていることが
確認できる。当該処理結果をもとに、元の鉄塔画像と処理
結果を重ね合わせることによる点検者への視覚的な補助
5
参考文献
(1)“ ドローンを用いた設備点検サービス ”, サービス・ソリューション | 中部電
力 パ ワ ー グ リ ッ ド , https://powergrid.chuden.co.jp/se-rvice_solution/
dronetenken/, ( 参照 2024-01-15)
や、錆領域の割合計算を行う。鉄塔部材抽出後の画像に重
ね合わせた例を第 6 図に示す。
技術開発ニュース 2024.03/No.168
98
�
- ▲TOP
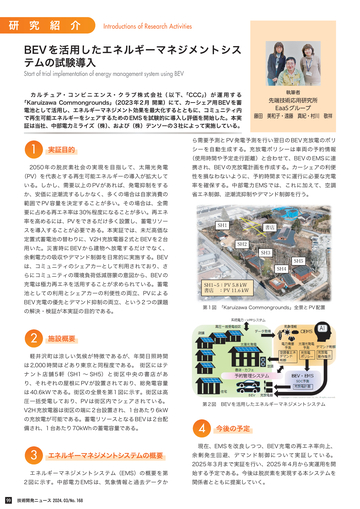
- ページ: 100
-
研 究 紹 介
Introductions of Research Activities
BEV を活用したエネルギーマネジメントシス
テムの試験導入
Start of trial implementation of energy management system using BEV
カ ル チ ュ ア・ コ ン ビ ニ エ ン ス・ ク ラ ブ 株 式 会 社( 以 下、
「CCC」
)が運用する
「Karuizawa Commongrounds」
(2023 年 2 月 開業)にて、カーシェア用 BEV を蓄
電池として活用し、エネルギーマネジメント効果を最大化するとともに、コミュニティ内
で再生可能エネルギーをシェアするための EMS を試験的に導入し評価を開始した。本実
証は当社、中部電力ミライズ(株)
、および(株)デンソーの 3 社によって実施している。
1
実証目的
執筆者
先端技術応用研究所
EaaS グループ
藤田 美和子・遠藤 真紀・村川 敬祥
ら需要予測と PV 発電予測を行い翌日の BEV 充放電のポリ
シーを自動生成する。充放電ポリシーは車両の予約情報
(使用時間や予定走行距離)と合わせて、BEV の EMS に連
2050 年の脱炭素社会の実現を目指して、太陽光発電
携され、BEV の充放電計画を作成する。カーシェアの利便
(PV)を代表とする再生可能エネルギーの導入が拡大して
性を損なわないように、予約時間までに運行に必要な充電
いる。しかし、需要以上の PV があれば、発電抑制をする
率を確保する。中部電力 EMS では、これに加えて、空調
か、安価に逆潮流するしかなく、多くの場合は自家消費の
省エネ制御、逆潮流抑制やデマンド制御を行う。
範囲で PV 容量を決定することが多い。その場合は、全需
要に占める再エネ率は 30% 程度になることが多い。再エネ
率を高めるには、PV をできるだけ多く設置し、蓄電リソー
SH1
スを導入することが必要である。本実証では、未だ高価な
定置式蓄電池の替わりに、V2H 充放電器 2 式と BEV を 2 台
書店
SH2
用いた。災害時に BEV から建物へ放電するだけでなく、
SH3
余剰電力の吸収やデマンド制御を日常的に実施する。BEV
は、コミュニティのシェアカーとして利用されており、さ
SH4
らにコミュニティの環境負荷低減啓蒙の意図から、BEV の
充電は極力再エネを活用することが求められている。蓄電
池としての利用とシェアカーの利便性の両立、PV による
BEV 充電の優先とデマンド抑制の両立、という 2 つの課題
の解決・検証が本実証の目的である。
2
SH5
SH1~5:PV 5.8 kW
書店 :PV 11.6 kW
第 1 図 「Karuizawa Commongrounds」全景と PV 配置
施設概要
軽井沢町は涼しい気候が特徴であるが、年間日照時間
は 2,000 時間ほどあり東京と同程度である。 街区にはテ
ナ ン ト 店 舗 5 軒(SH1 ~ SH5) と 街 区 中 央 の 書 店 が あ
り、それぞれの屋根に PV が設置されており、総発電容量
は 40.6kW である。街区の全景を第 1 図に示す。街区は高
圧一括受電しており、PV は街区内でシェアされている。
V2H 充放電器は街区の端に 2 台設置され、1 台あたり 6kW
の充放電が可能である。蓄電リソースとなる BEV は 2 台配
備され、1 台あたり 70kWh の蓄電容量である。
3
99
エネルギーマネジメントシステムの概要
第 2 図 BEV を活用したエネルギーマネジメントシステム
4
今後の予定
現在、EMS を改良しつつ、BEV 充電の再エネ率向上、
余 剰 発 生 回 避、 デ マ ン ド 制 御 に つ い て 実 証 し て い る。
2025 年 3 月まで実証を行い、2025 年 4 月から実運用を開
エネルギーマネジメントシステム(EMS)の概要を第
始する予定である。今後は脱炭素を実現する本システムを
2 図に示す。中部電力 EMS は、気象情報と過去データか
関係者とともに提案していく。
技術開発ニュース 2024.03/No.168
�
- ▲TOP

- ページ: 101
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
道の駅における PV・空調・蓄電池を用いた
実証試験
Introduction of demonstration using PV, air conditioning, and storage batteries at roadside stations
執筆者
当社は、中日本ハイウェイエンジニアリング名古屋 ( 株 ) さまのご協力により、道の駅
「越前おおの荒島の郷」(福井県)にて、( 株 ) トーエネックとの共同で、空調機器、太陽
光発電と蓄電池を組み合わせたエネマネ実証を行っている。この実証のねらいは道の駅・
サービスエリアのエネマネ、および寒冷地空調制御技術の高度化である。
1
3
背景と目的
道の駅は、地域の重要な振興施設であると同時に、商業
施設と⾔える。そのため、多くの空調機器が設置されてお
先端技術応用研究所
EaaS グループ
村川 敬祥
開発システムの特長
(1) 空調 EMS による省エネ実証
空調 EMS は稼働率が 50% 未満の場合、空調機の停止と
り、施設全体の消費電力量に対する空調消費電力量は約半
稼働を交互に行う間欠運転制御を行い、50% 以上の場合
数を占める。また、広域的な災害発生時の拠点となる「防
は、稼働率に閾値を設ける能力抑制制御を行った。その結
災道の駅」としての役割を担っており、レジリエンスの強
果、実証日においても冬場の快適温度 (18 ~ 22℃ ) の範
化が求められている。一方、当社は、ビルや工場等の様々
囲内で制御ができており、快適性への影響はなく空調機の
なフィールドにて、空調機器や蓄電池、太陽光発電等をエ
消費電力量の 3 割程度 (211.3kWh) 削減することが出来
ネルギーリソースとする EMS を試作している。本紹介で
た。冬季実証を行った日の空調消費電力量 ( 右図 ) と外気
は、考案した EMS を活用して、道の駅における空調省エ
温等が同じ条件となる比較日 ( 左図 ) を第 4 図に示す。
ネ制御や、PV・蓄電池制御の実証試験について紹介する。
180
6.0
5.0
160
5.0
3.0
100
調定格消費電力は 87kW、商業エリアが 58kW である。ま
た、太陽光発電設備 4kW、家庭用蓄電池 8 台 (16kW) を設
置し、空調 EMS と連携させ実証を行った。「道の駅」上空
写真と PV・蓄電池設備外観を第 2 図、第 3 図に示す。
家庭用蓄電池8台
太陽光発電:4kW 16kW 32.8kWh
GW
GW
W
G
GW
商業エリア
0.0
40
20
-1.0
0
-2.0
9:00
11:00
振興(FC)
フードコート
13:00
15:00
物販2
商業エリア
17:00
外気
2.0
80
1.0
60
0.0
40
-1.0
20
0
9:00
11:00
13:00
振興(北側)
フードコート
15:00
物販2
商業エリア
17:00
-2.0
外気
(a) 比較日 (2023/12/1) (b)実証日(2023/12/2)
第 4 図 冬期空調機器の省エネ結果
を計算し、需要予測と合わせ蓄電池の充放電を行った。
ク ウド
クラウド
G
1.0
60
3.0
100
太陽光発電実績と天気予報のデータから翌日の発電予想
G
GW
80
10:00-16:00 省エネ運用
(2) 蓄電池充放電によるピークカット実証
監視制御
サーバ
屋外
2.0
4.0
120
温度[℃]
120
道の駅平面図を第 1 図に示す。フードコートエリアの空
140
4.0
温度[℃]
140
電力[kW(30分平均)]
実証概要
6.0
160
電力[kW(30分平均)]
2
180
(3) レジリエンスを考慮した PV・蓄電池容量検討
実証データを用いた各種シミュレーションを実施した。
フードコート
4
カ フ
第 1 図 道の駅 平面図
今後の予定
今回の実証では、太陽光パネルの傾斜をつけることで積
雪影響を小さくでき、冬期発電量を確保できることが分かっ
PV
蓄電池
PV と家庭用
蓄電池
PV
蓄電池
た。この発電実測値や負荷実測データを活用し、レジリエン
スや環境負荷低減のために、本施設が保有する遊休地を有
効活用した太陽光発電や蓄電池設備の増強を提案していく。
合わせて、本実証施設と同様な設備構成となり、広域災
害拠点となる、道の駅やサービスエリアに対しても提案し
第 2 図 道の駅上空写真 第 3 図 PV・蓄電池外観
ていく。
技術開発ニュース 2024.03/No.168
100
�
- ▲TOP
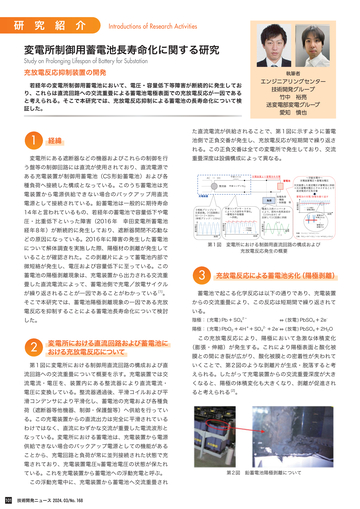
- ページ: 102
- 101
研 究 紹 介
Introductions of Research Activities
変電所制御用蓄電池長寿命化に関する研究
Study on Prolonging Lifespan of Battery for Substation
充放電反応抑制装置の開発
執筆者
エンジニアリングセンター
技術開発グループ
竹中 裕亮
送変電部変電グループ
愛知 慎也
若経年の変電所制御用蓄電池において、電圧・容量低下等障害が断続的に発生してお
り、これらは直流回路への交流重畳による蓄電池電極表面での充放電反応が一因である
と考えられる。そこで本研究では、充放電反応抑制による蓄電池の長寿命化について検
証した。
1
経緯
変電所にある遮断器などの機器およびこれらの制御を行
た直流電流が供給されることで、第 1 図に示すように蓄電
池側で正負交番が発生し、充放電反応が短期間で繰り返さ
れる。この正負交番は全ての変電所で発生しており、交流
重畳深度は設備構成によって異なる。
う盤等の制御回路には直流が使用されており、直流電源で
ある充電装置が制御用蓄電池(CS 形鉛蓄電池)および各
AC
DC
種負荷へ接続した構成となっている。このうち蓄電池は充
電装置から電源供給できない場合のバックアップ用直流
/
電源として接続されている。鉛蓄電池は一般的に期待寿命
14 年と⾔われているもの、若経年の蓄電池で容量低下や電
圧・比重低下といった障害(2016 年 幸田変電所蓄電池
DC
60×3×2 360Hz
(
120Hz)
120Hz
DC
経年 8 年)が断続的に発生しており、遮断器開閉不応動な
Pb
どの原因になっている。2016 年に障害の発生した蓄電池
いることが確認された。この剥離片によって蓄電池内部で
蓄電池の陽極剥離現象は、充電装置から出力される交流重
畳した直流電流によって、蓄電池側で充電/放電サイクル
4H
PbSO4 2e
SO42
2e
PbSO4
2H2O
第 1 図 変電所における制御用直流回路の構成および
充放電反応発生の概要
について解体調査を実施した際、陽極材の剥離が発生して
微短絡が発生し、電圧および容量低下に至っている。この
SO42
PbO2
3
充放電反応による蓄電池劣化(陽極剥離)
が繰り返されることが一因であることがわかっている [1]。
蓄電池で起こる化学反応は以下の通りであり、充電装置
そこで本研究では、蓄電池陽極剥離現象の一因である充放
からの交流重畳により、この反応は短期間で繰り返されて
電反応を抑制することによる蓄電池長寿命化について検討
いる。
した。
陰極:( 充電 )Pb + SO42 -
⇔ ( 放電 )PbSO4 + 2e-
陽極:( 充電 )PbO2 + 4H + SO4 + 2e ⇔ ( 放電 )PbSO4 + 2H2O
+
2-
-
この充放電反応により、陽極において急激な体積変化
変電所における直流回路および蓄電池に
おける充放電反応について
(膨張・伸縮)が発生する。これにより陽極表面と酸化被
第 1 図に変電所における制御用直流回路の構成および直
いくことで、第 2 図のような剥離片が生成・脱落すると考
流回路への交流重畳について概要を示す。充電装置では交
えられる。したがって充電装置からの交流重畳深度が大き
流電流・電圧を、装置内にある整流器により直流電流・
くなると、陽極の体積変化も大きくなり、剥離が促進され
電圧に変換している。整流器通過後、平滑コイルおよび平
ると考えられる [2]。
2
膜との間にき裂が広がり、酸化被膜との密着性が失われて
滑コンデンサにより平滑化し、蓄電池の充電および各種負
荷(遮断器等他機器、制御・保護盤等)へ供給を行ってい
る。この充電装置からの直流出力は完全に平滑されている
わけではなく、直流にわずかな交流が重畳した電流波形と
なっている。変電所における蓄電池は、充電装置から電源
供給できない場合のバックアップ電源としての機能がある
ことから、充電回路と負荷が常に並列接続された状態で充
電されており、充電装置電圧≒蓄電池電圧の状態が保たれ
ている。これを充電装置から蓄電池への浮動充電と呼ぶ。
この浮動充電中に、充電装置から蓄電池へ交流重畳され
技術開発ニュース 2024.03/No.168
第 2 図 鉛蓄電池陽極剥離について
�
- ▲TOP
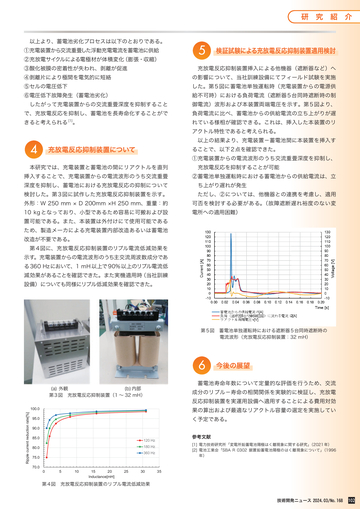
- ページ: 103
-
研 究 紹 介
以上より、蓄電池劣化プロセスは以下のとおりである。
①充電装置から交流重畳した浮動充電電流を蓄電池に供給
②充放電サイクルによる電極材が体積変化(膨張・収縮)
5
検証試験による充放電反応抑制装置適用検討
③酸化被膜の密着性が失われ、剥離が促進
充放電反応抑制装置挿入による他機器(遮断器など)へ
④剥離片により極間を電気的に短絡
の影響について、当社訓練設備にてフィールド試験を実施
⑤セルの電圧低下
した。第 5 図に蓄電池単独運転時(充電装置からの電源供
⑥電圧低下故障発生(蓄電池劣化)
給不可時)における負荷電流(遮断器 5 台同時遮断時の制
したがって充電装置からの交流重畳深度を抑制すること
御電流)波形および本装置両端電圧を示す。第 5 図より、
で、充放電反応を抑制し、蓄電池を長寿命化することがで
負荷電流に比べ、蓄電池からの供給電流の立ち上がりが遅
きると考えられる 。
れている様相が確認できる。これは、挿入した本装置のリ
[1]
アクトル特性であると考えられる。
4
以上の結果より、充電装置-蓄電池間に本装置を挿入す
充放電反応抑制装置について
ることで、以下 2 点を確認できた。
①充電装置からの電流波形のうち交流重畳深度を抑制し、
本研究では、充電装置と蓄電池の間にリアクトルを直列
挿入することで、充電装置からの電流波形のうち交流重畳
深度を抑制し、蓄電池における充放電反応の抑制について
充放電反応を抑制することが可能
②蓄電池単独運転時における蓄電池からの供給電流は、立
ち上がり遅れが発生
検討した。第 3 図に試作した充放電反応抑制装置を示す。
ただし、②については、他機器との連携を考慮し、適用
外形:W 250 mm × D 200mm ×H 250 mm、重量:約
可否を検討する必要がある。(故障遮断遅れ裕度のない変
10 kg となっており、小型であるため容易に可搬および設
電所への適用困難)
置可能である。また、本装置は外付けにて使用可能である
ため、製造メーカによる充電装置内部改造あるいは蓄電池
改造が不要である。
第 4 図に、充放電反応抑制装置のリプル電流低減効果を
示す。充電装置からの電流波形のうち主交流周波数成分であ
る 360 Hzにおいて、1 mH 以上で 90% 以上のリプル電流低
減効果があることを確認できた。また実機適用時(当社訓練
設備)についても同様にリプル低減効果を確認できた。
第 5 図 蓄電池単独運転時における遮断器 5 台同時遮断時の
電流波形(充放電反応抑制装置:32 mH)
6
蓄電池寿命年数について定量的な評価を行うため、交流
(a) 外観 (b) 内部
第 3 図 充放電反応抑制装置(1 ~ 32 mH)
成分のリプル-寿命の相関関係を実験的に検証し、充放電
反応抑制装置を実運用設備へ適用することによる費用対効
果の算出および最適なリアクトル容量の選定を実施してい
100.0
Ripple current reduction rate[%]
今後の展望
く予定である。
95.0
90.0
85.0
[1] 電力技術研究所「変電所鉛蓄電池陽極はく離現象に関する研究」(2021 年)
[2] 電池工業会「SBA R 0302 据置鉛蓄電池陽極のはく離現象について」
(1996
年)
180 Hz
80.0
360 Hz
75.0
70.0
参考文献
120 Hz
0
5
10
15
20
Inductance[mH]
25
30
35
第 4 図 充放電反応抑制装置のリプル電流低減効果
技術開発ニュース 2024.03/No.168
102
�
- ▲TOP
- ページ: 104
- 103
内 外 ニ ュ ース
Internal and External News
2023 年度技術研究開発賞選考発表会および
第 76 回中部電力技術研究発表会 開催
2023 年 11 月 30 日(木)、「2023 年度技術研究開発賞
の言葉を紹介します。「少にして学べば、即ち壮にして為
選考発表会(以下、開発賞)」および「第 76 回中部電力技
すことあり。壮にして学べば、即ち老いて衰えず。老いて
術研究発表会(以下、発表会)」を開催しました。
学べば、即ち死して朽ちず。」みなさんが研究に励んでい
開発賞については当社や地域社会または科学技術の進歩
ること、成果、プロセスはずっと残り続けるということで
に貢献した研究に対し表彰をもって賞揚し、士気の高揚と
す。一人ひとりが自律的に前を向いて学ぶこと、研究する
成果の周知活用を目的に、発表会については技術の向上、
ことが非常に大切であると思っております。
事業所・部門間の技術交流、ならびに研究意欲の向上を目
二点目は、研究成果を広く社会に実装するには「技術を
的に、毎年開催しています。今年度は、発表会のポスター
オープンにして育てること」つまり、「標準化」が必要で
セッションを中電ホール 3 階ホワイエにて 4 年ぶりに現地
す。色々な人・仲間・団体と手を合わせ、新たな技術の種
開催しました。(受賞結果は別表参照)
をみつけ、課題を意識しながら育て、成果を具体的な形
開会にあたり、林社長が挨拶され、
『当社は経営ビジョ
にして社会にフィードバックすることが大切です。知識を
ン 2.0 で「地球環境に配慮した安全・安価で安定的なエネ
オープンにしても、必ず自分たちのところへ成果が帰って
ルギーのお届け」いわゆる「変わらぬ使命の完遂」ととも
きます。恐れずに仲間と一緒になって研究開発に取り組ん
に、お客さまの暮らしを豊かにする「新たな価値の創出」
でください。今日、共有できた情報をさらに自部門での事
により、地域・社会の持続的な発展に貢献することを宣言
象に置き換えて考え、一層、技術研究開発に取り組んでい
しました。これら 2 本の柱につながる、会社の様々な具体
ただければ、中部電力グループとしての発展につながると
的課題を解決するには「イノベーション」が必要で、そ
大いに期待しております。』との技術開発に期待するメッ
れを実行するのは「人」、社員の皆さん一人ひとりの力に
セージが伝えられました。
かかっています。経営ビジョン 2.0 や 2050 年のカーボン
閉会式では、鍋田技術開発本部長から、『発表された内
ニュートラル実現には、「技術力」と「仲間作り」が大切
容には、膨大なデータを集約・加工し、理論に裏打ちされ
と考えています。
た大きな成果を出していただいたものがありました。成果
そこで、私から 2 つのお願いがあります。一点目は、技
を出すまでに非常に長い時間をかけてトライ&エラーで進
術力を高め、社会課題解決のための成果を生み出すために
めてくれたことを評価します。他にも目から鱗のような発
は、「一人ひとりが自律的に行動すること」が必要です。
想豊かなものが多くあり、大変頼もしく思いました。本日
一人ひとりが技術力を高め、会社の直面している課題を自
の素晴らしい研究成果が中部電力グループの発展、社会貢
分事としてとらえて、自律的に行動し、勤しむこと、課題
献につながるよう期待しています。』との講評をいただき
解決につながる種を見つけること、それぞれの役割に応じ
ました。
て自律的に行動できてこそ様々な課題解決への道が効果的
今年も多くの皆さまのご協力により、無事に開催できま
に開けてきます。ここで江戸末期の著名な学者、佐藤一斎
した。ご協力ありがとうございました。
林社長
技術開発ニュース 2024.03/No.168
鍋田技術開発本部長
�
- ▲TOP
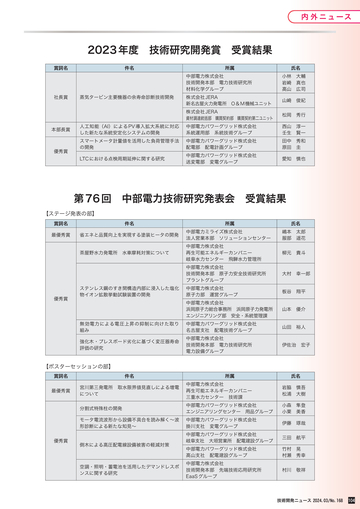
- ページ: 105
-
内 外 ニ ュ ース
2023 年度 技術研究開発賞 受賞結果
賞詞名
社長賞
本部長賞
優秀賞
件名
所属
氏名
中部電力株式会社
技術開発本部 電力技術研究所
材料化学グループ
小林 大輔
岩崎 真也
高山 広司
株式会社 JERA
新名古屋火力発電所 O&M 機械ユニット
山崎 俊紀
株式会社 JERA
資材調達統括部 購買契約部 購買契約第二ユニット
松岡 秀行
人工知能(AI)による PV 導入拡大系統に対応
した新たな系統安定化システムの開発
中部電力パワーグリッド株式会社
系統運用部 系統技術グループ
西山 淳一
壬生 賢一
スマートメータ計量値を活用した負荷管理手法
の開発
中部電力パワーグリッド株式会社
配電部 配電計画グループ
田中 秀和
原田 圭
LTC における点検周期延伸に関する研究
中部電力パワーグリッド株式会社
送変電部 変電グループ
愛知 慎也
蒸気タービン主要機器の余寿命診断技術開発
第 76 回 中部電力技術研究発表会 受賞結果
【ステージ発表の部】
賞詞名
最優秀賞
優秀賞
件名
所属
省エネと品質向上を実現する塗装ヒータの開発
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
嶋本 太郎
服部 遥花
茶屋野水力発電所 水車摩耗対策について
中部電力株式会社
再生可能エネルギーカンパニー
岐阜水力センター 飛騨水力管理所
柳元 貴斗
中部電力株式会社
技術開発本部 原子力安全技術研究所
プラントグループ
大村 幸一郎
中部電力株式会社
原子力部 運営グループ
板谷 翔平
中部電力株式会社
浜岡原子力総合事務所 浜岡原子力発電所
エンジニアリング部 安全・系統管理課
山本 優介
無効電力による電圧上昇の抑制に向けた取り
組み
中部電力パワーグリッド株式会社
名古屋支社 配電技術グループ
山田 裕人
強化木・プレスボード劣化に基づく変圧器寿命
評価の研究
中部電力株式会社
技術開発本部 電力技術研究所
電力設備グループ
伊佐治 宏子
ステンレス鋼のすき間構造内部に浸入した塩化
物イオン拡散挙動試験装置の開発
氏名
【ポスターセッションの部】
賞詞名
最優秀賞
優秀賞
件名
所属
氏名
宮川第三発電所 取水限界値見直しによる増電
について
中部電力株式会社
再生可能エネルギーカンパニー
三重水力センター 技術課
岩脇 慎吾
松浦 大樹
分割式特殊柱の開発
中部電力パワーグリッド株式会社
エンジニアリングセンター 用品グループ
小森 隼登
小栗 美香
モータ電流波形から設備不具合を読み解く~波
形診断による新たな知見~
中部電力パワーグリッド株式会社
掛川支社 変電グループ
伊藤 琢哉
中部電力パワーグリッド株式会社
岐阜支社 大垣営業所 配電建設グループ
三田 航平
中部電力パワーグリッド株式会社
高山支社 配電建設グル-プ
竹村 晃
村瀬 秀幸
中部電力株式会社
技術開発本部 先端技術応用研究所
EaaS グループ
村川 敬祥
倒木による高圧配電線設備被害の軽減対策
空調・照明・蓄電池を活用したデマンドレスポ
ンスに関する研究
技術開発ニュース 2024.03/No.168
104
�
- ▲TOP
- ページ: 106
- 105
内 外 ニ ュ ース
Internal and External News
技術研究開発 社長賞
技術研究開発 本部長賞
技術研究開発 優秀賞
技術研究開発 優秀賞
中部電力技術研究発表会ステージ発表の部 最優秀賞
中部電力技術研究発表会ステージ発表の部 優秀賞
中部電力技術研究発表会ステージ発表の部 優秀賞
技術開発ニュース 2024.03/No.168
中部電力技術研究発表会ステージ発表の部 優秀賞
�
- ▲TOP
- ページ: 107
-
内 外 ニ ュ ース
中部電力技術研究発表会ステージ発表の部 優秀賞
中部電力技術研究発表会ポスターセッションの部 最優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
技術開発ニュース 2024.03/No.168
106
�
- ▲TOP

- ページ: 108
- 107
内 外 ニ ュ ース
Internal and External News
液式調湿空調機「モイストプロセッサー」が
中部科学技術センター奨励賞を受賞
先端技術応用研究所 先端技術ソリューショングループ
果(除菌性・抗ウイルス性)を高めることができたことが
の中山 浩さんが開発した液式調湿空調機「モイストプロ
技術的に高く評価されたものです。
セッサー」が、第 22 回中部科学技術センター奨励賞を受
賞しました。(ダイナエアー株式会社、エボニックジャパ
ン株式会社との共同受賞)
「モイストプロセッサー」は、液体の調湿剤を用いて空
気の温度と湿度を調節する調湿空調機で、省エネ性が高く
病院や老人保健施設をはじめとして、工場にも多数採用さ
れています。今回の受賞は、機器の持つ高い省エネ性に加
え、調湿性能が高く金属腐食性の低いイオン液体を世界で
初めて採用したことで、構成材料に汎用金属の使用が可能
となり、従来機より機器コストを低減しつつ、空気清浄効
左から所長の田中さんと開発者の中山さん
CIGRE シンポジウム投稿論文が Best of Papers に選定
2023 年 9 月 4 日~ 7 日にオーストラリアのケアンズで
ゴリの生起頻度から故障確率(PoF)を算出して設備の経
開 催 さ れ た 国 際 会 議 CIGRE International Symposium
年劣化カーブを推定する手法を提案しています。提案手法
2023 Cairns に お い て、 中 部 電 力 パ ワ ー グ リ ッ ド 送 変
は変電分野の設備管理や投資計画の効率化に資する要素技
電部の小林 知弘さんと、先端技術応用研究所 情報技術
術であり、大規模⾔語モデル(BERT)を活用したテキス
グ ル ー プ の 瀬 川 修 さ ん が 発 表 し た 論 文 “Estimation of
トマイニング手法が技術的に高く評価されました。
degradation curves for substation equipment using
text mining” がシンポジウムの Best of Papers に選定さ
れ、CIGRE が 発 行 す る Science & Engineering (CSE)
Journal #31
(https://cse.cigre.org/)に掲載されました。
この CSE は、CIGRE に投稿された論文のうち、特に技
術レベルの高いものを選定して掲載するジャーナルで、今
回の特集号ではケアンズシンポジウムで発表された 11 分
野(240 論文)の中から各分野における最優秀論文が 1 件
ずつ計 11 件選ばれています(本論文の分野は B3:変電所
および電気施設)。
本論文では、変電所の障害記録に含まれるテキスト記述
CIGRE Symposium 2023 で発表する小林さん
に基づき、各事例を故障モードにカテゴリ分類し、各カテ
「Smart City Park from AXIA EXPO」に出展
2023 年 10 月 5 日 ~ 6 日 の 2 日 間、 次 世 代 型 ス マ ー ト
シティをテーマとしたイベント「Smart City Park from
AXIA EXPO」に出展しました。このイベントは「AXIA
EXPO 2024」のプレイベントとして、Aichi Sky Expo(中
部国際空港島内)で開催されたもので、当社は「水素・ア
ンモニア次世代エネルギー展」で「メタンからの水素製造
技術(ターコイズ水素)」を、「GX イノベーション展」に
おいて「リチウムの効率的な回収技術」を展示しました。
大村愛知県知事へリチウム回収技術の研究をご紹介
技術開発ニュース 2024.03/No.168
�
- ▲TOP

- ページ: 109
-
内 外 ニ ュ ース
当日は、大村愛知県知事をはじめ、自治体や企業関係の
方をはじめとする多数のお客さまがお立ち寄りになり、技
術研究開発の実用化に向けた期待や応援の声をいただきま
した。
※「AXIA EXPO 2024」においても、水素・アンモニア
をはじめとする技術研究開発の出展を予定しています。
ターコイズ水素製造技術の研究をご紹介
「テクノフェア 2023」を開催
当社は、お客さまに当社グループの技術開発研究への
決」に関する技術研究開発を中心に、最新の研究成果や要
2023」を技術開発本部(名古屋市緑区)およびホーム
中でも、10 月 26 日(木)
、27 日(金)に技術開発本部
取り組みをご紹介させていただくため、「テクノフェア
ページ上特設サイトで開催しました。
昨年に引き続き、当社経営ビジョン 2.0 の実現に向け設
定した 7 つの重点分野である「再生可能エネルギーの拡
大」、「水素・アンモニアのサプライチェーン構築」、「原子
力発電の最大限活用」、「エネルギープラットフォームに
よる価値提供」、「データプラットフォームによる価値提
供」、「お客さまとの接点拡大・価値提供」、「資源循環事業
の展開」や、従来からの研究テーマである「現場課題の解
素技術を展示しました。
で開催された「大高展示会」では、実機・実演による展示
を中心に計 67 の展示を行い、2 日間で合計 1,600 名のお客
さまにご来場いただきました。
各研究員の説明を受けたお客様からは、
「中部電力は電気
のイメージが強いですが、このような分野まで幅広く研究し
ていることに驚きました」
、
「研究内容の実用化が待ち遠しい
です」といった期待や応援が込められた多くの反響をいただ
きました。
テクノフェア 2023 大高展示会の様子
浮体式洋上風車の水理模型実験
ターコイズ水素製造技術への取組み
既設火力発電所における水素・アンモニア混焼技術
基礎ボルトの超音波による非破壊検査技術
保護衣確認 AI ゲートの改良
軽井沢まちづくりの取り組みと西館・商業施設 EMS
ミニチュア電力設備によるマイクログリッド模擬試験
空間共有型 3D 遠隔コミュニケーション
工場のオイルミスト対策の取り組み
技術開発ニュース 2024.03/No.168
108
�
- ▲TOP

- ページ: 110
- 109
内 外 ニ ュ ース
Internal and External News
高品質冷凍・解凍技術の紹介
資源循環植物ソルガムとそのカスケード利用
地域伝統野菜等の栽培へのバイオ炭の有効性評価
ヒートポンプ式洗浄液加温システムの開発
現場を支える材料評価技術(結晶方位解析)
ドローンを用いた送電設備自動点検
「テクノフェア」の展示内容は、当社ホームページからご覧いただけます。
https://www.chuden.co.jp/seicho_kaihatsu/kaihatsu/techno/
技術開発ニュース 読者アンケートご協力のお願い
技術開発ニュース 168 号をご覧いただきありがとうございます。
本アンケートは、ご覧いただいた方々のご意見・ご感想を参考にして、掲載内容をより充実させていくことを目的として
おります。是非、ご意見やご感想などをお聞かせいただけましたら幸いです。
皆様からのご回答を心よりお待ち申し上げております。
アンケートの回答はこちらから
URL:https://preconfe.net/chuden_news/questionnaire.php
※ アンケートは 5 分程度でお答えいただけます。
※ アンケート締切:2024 年 5 月 31 日 ( 金)
技術開発ニュース 2024.03/No.168
�
- ▲TOP
- ページ: 111
- 技術開発ニュースバックナンバー
「技術開発ニュース」は技術開発ニュースライブラリーサイトからもご覧いただけます。
(1979 年発行の 1 号より掲載)
https://www.chuden.co.jp/seicho_kaihatsu/kaihatsu/news/
お問い合わせフォーム
当社の開放特許や研究内容に関するお問い合わせはこちらからご連絡ください。
※本誌掲載情報の著作権は当社に帰属します。
転載を希望する場合は、その旨を必ずご連絡ください(無断転載禁止)。
https://www.chuden.co.jp/faq/inquiry/inq_kenkyu/
技術開発ニュース 168 号
発行年月:2024 年 3 月
【発行所】
中部電力株式会社 技術開発本部 技術企画室 業務グループ
〒 459-8522
名古屋市緑区大高町字北関山 20 - 1
電話:(052)621-6101
E-mail:rd.news@chuden.co.jp
【データ制作・印刷所】
株式会社プラン・エディターズ
〒 462-0042
名古屋市北区水草町 1-68-2
電話(052)982-7051
�
- ▲TOP
- ページ: 112
- 技術開発本部
電力技術研究所・先端技術応用研究所
�
- ▲TOP