技術開発ニュース No.168
- ページ: 64
-
研 究 成 果
Results of Research Activities
ドローンの自動再現飛行および障害物回避技術
の開発・検証
Development and Verification of Drone Technologies for Automated Flights and Obstacle Avoidance
ドローンによる樹木繁茂下での自動飛行・撮影技術の確立を目指して
本研究は、樹木繁茂下の配電線に係るドローン巡視において、マニュアル操作で障害物
を回避した飛行ルートを基に、このルートを再現する自動飛行および撮影の技術の開発・
検証を行った。この技術では、マニュアル操作での飛行ルートの記録機能、これを再現
する自動再現飛行機能、および記録時と飛行時の環境変化に起因した障害物(例:樹木
の生長や倒木など)を回避する機能を具備する。
1
背景・目的
執筆者
先端技術応用研究所
情報技術グループ
難波 隆博
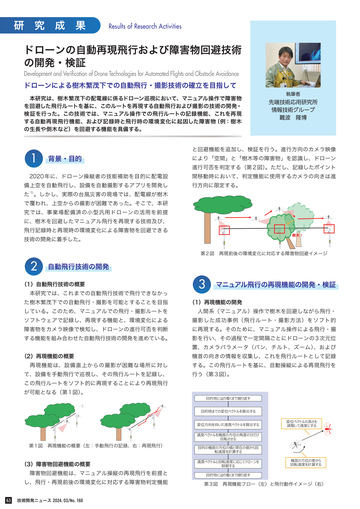
と回避機能を追加し、検証を行う。進行方向のカメラ映像
により「空間」と「樹木等の障害物」を認識し、ドローン
進行可否を判定する(第 2 図)。ただし、記録したポイント
2020 年に、ドローン操縦者の技能補助を目的に配電設
間移動時において、判定機能に使用するカメラの向きは進
備上空を自動飛行し、設備を自動撮影するアプリを開発し
行方向に限定する。
た 。しかし、実際の台風災害の現場では、配電線が樹木
1)
で覆われ、上空からの撮影が困難であった。そこで、本研
究では、事業場配備済の小型汎用ドローンの活用を前提
に、樹木を回避したマニュアル飛行を再現する技術及び、
飛行記録時と再現時の環境変化による障害物を回避できる
技術の開発に着手した。
第 2 図 再現前後の環境変化に対応する障害物回避イメージ
2
自動飛行技術の開発
(1)自動飛行技術の概要
本研究では、これまでの自動飛行技術で飛行できなかっ
た樹木繁茂下での自動飛行・撮影を可能とすることを目指
している。このため、マニュアルでの飛行・撮影ルートを
3
マニュアル飛行の再現機能の開発・検証
(1)再現機能の開発
人間系(マニュアル)操作で樹木を回避しながら飛行・
ソフトウェアで記録し、再現する機能と、環境変化による
撮影した成功事例(飛行ルート・撮影方法)をソフト的
障害物をカメラ映像で検知し、ドローンの進行可否を判断
に再現する。そのために、マニュアル操作による飛行・撮
する機能を組み合わせた自動飛行技術の開発を進めている。
影を行い、その過程で一定間隔ごとにドローンの 3 次元位
(2)再現機能の概要
置、カメラパラメータ(パン、チルト、ズーム)、および
機首の向きの情報を収集し、これを飛行ルートとして記録
再現機能は、設備直上からの撮影が困難な場所に対し
する。この飛行ルートを基に、自動操縦による再現飛行を
て、設備を手動飛行で巡視し、その飛行ルートを記録し、
行う(第 3 図)。
この飛行ルートをソフト的に再現することにより再現飛行
が可能となる(第 1 図)。
第 1 図 再現機能の概要(左:手動飛行の記録、右:再現飛行)
(3)障害物回避機能の概要
障害物回避機能は、マニュアル操縦の再現飛行を前提と
し、飛行・再現前後の環境変化に対応する障害物判定機能
63
技術開発ニュース 2024.03/No.168
第 3 図 再現機能フロー(左)と飛行動作イメージ(右)
�
- ▲TOP