技術開発ニュース No.168
- ページ: 65
-
研 究 成 果
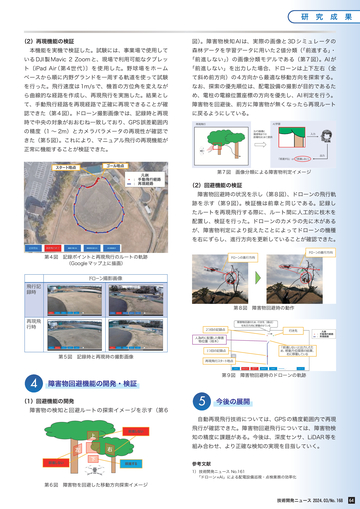
(2)再現機能の検証
図)。障害物検知 AI は、実際の画像と 3D シミュレータの
本機能を実機で検証した。試験には、事業場で使用して
森林データを学習データに用いた 2 値分類(「前進する」・
いる DJI 製 Mavic 2 Zoom と、現場で利用可能なタブレッ
「前進しない」)の画像分類モデルである(第 7 図)。AI が
ト〔iPad Air( 第 4 世代)〕を使用した。野球場をホーム
「前進しない」を出力した場合、ドローンは上下左右(全
ベースから順に内野グランドを一周する軌道を使って試験
て斜め前方向)の 4 方向から最適な移動方向を探索する。
を行った。飛行速度は 1m/s で、機首の方位角を変えなが
なお、探索の優先順位は、配電設備の撮影が目的であるた
ら曲線的な経路を作成し、再現飛行を実施した。結果とし
め、電柱の電線位置座標の方向を優先し、AI 判定を行う。
て、手動飛行経路を再現経路で正確に再現できることが確
障害物を回避後、前方に障害物が無くなったら再現ルート
認できた(第 4 図)。ドローン撮影画像では、記録時と再現
に戻るようにしている。
時で中央の対象がおおむね一致しており、GPS 誤差範囲内
AI
の精度(1 ~ 2m)とカメラパラメータの再現性が確認で
きた(第 5 図)。これにより、マニュアル飛行の再現機能が
正常に機能することが検証できた。
or
第 7 図 画像分類による障害物判定イメージ
(2)回避機能の検証
障害物回避時の状況を示し(第 8 図)、ドローンの飛行軌
跡を示す(第 9 図)。検証機は前章と同じである。記録し
たルートを再現飛行する際に、ルート間に人工的に枝木を
配置し、検証を行った。ドローンのカメラの先に木がある
が、障害物判定により捉えたことによってドローンの機種
を右にずらし、進行方向を更新していることが確認できた。
第 4 図 記録ポイントと再現飛行のルートの軌跡
(Google マップ上に描画)
第 8 図 障害物回避時の動作
2
1
第 5 図 記録時と再現時の撮影画像
4
第 9 図 障害物回避時のドローンの軌跡
障害物回避機能の開発・検証
(1)回避機能の開発
障害物の検知と回避ルートの探索イメージを示す(第 6
5
今後の展開
自動再現飛行技術については、GPS の精度範囲内で再現
飛行が確認できた。障害物回避飛行については、障害物検
知の精度に課題がある。今後は、深度センサ、LiDAR 等を
組み合わせ、より正確な検知の実現を目指していく。
参考文献
1) 技術開発ニュース No.161
「ドローン ×AI」による配電設備巡視・点検業務の効率化
第 6 図 障害物を回避した移動方向探索イメージ
技術開発ニュース 2024.03/No.168
64
�
- ▲TOP