技術開発ニュース No.168
- ページ: 89
-
研 究 紹 介
が必要なため、大型でコストが高く、消費電力も非常に高
【個人識別 AI】
い、GPU コンピューティング処理を行う製品が必要でした
人物を検出するだけではなく、ある時刻に検出した作業
が、Jetson を用いることで、安価に GPU コンピューティ
員が、別の時刻に検出した人と同一人物であるか、別の作
ング処理が可能となった。
業員であるかを識別することが望まれる。しかし画像によ
る顔認証などの個人識別を行う仕組みでは、遠くに映って
② カメラ
いる作業員を高い精度で区別することは困難である。
H.VIEW 製の防犯カメラ HV-E800D を用いた。カメラは
このため、画像による識別を容易とするようなマーカー
物体識別を行ううえで一定以上の解像度が必要となる。ま
を各作業員にあらかじめ装着し、その情報を活用して識別
た、近くから遠くまで広いエリアまでピントが合うことが
を行った。今回は色情報をマーカーとして計 9 色のカラー
求めれる。USB カメラや Web カメラの検証を行ったが、
ビブス、カラーキャップを作業員に着用してもらい識別す
USB カメラについては、ピントが合う距離範囲が狭く、遠
る手法を採用した。また、識別精度向上のため事前撮影し
方にピントを合わせた場合、近い距離にはピントが合わな
たアノテーションデータ(計 12,298 枚の画像)で学習を
いことが確認できた。そこで Web カメラのなかでも、で
行い、識別 AI プログラムを作成した。
きるだけ遠方の人物にも AI 推論が可能な機種を選定した。
今回作成したモデルでは、特定の色で誤検出や検出漏れ
また、エッジコンピュータで映像を取り込むための映像
が多いこと、背景色との同化や光/影の影響が大きいこと
配信プロトコルには一般に用いられている RTSP(※ Real
から、9 色を識別することは困難であった。ただし、3 色
Time Streaming Protocol)を利用した。
程度に色数を絞る(例えば、赤、青、黄色)対応や、更な
る学習データの追加を行うことにより、精度向上につなが
ると期待される。
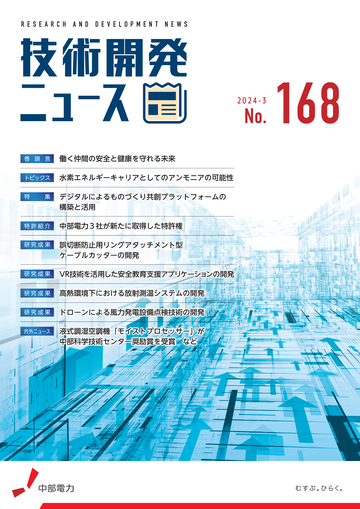
PC
PC
Wi-Fi
Internet
【位置把握】
カメラ映像およびイチゴ栽培施設の平面図の対応する 4
BOX
点を事前に指定しておくことで、カメラで検出した人物の
BOX
PoE-HUB
BOX2
PoE-HUB
SW-HUB
位置を図面上の位置(座標)に射影変換するプログラムを
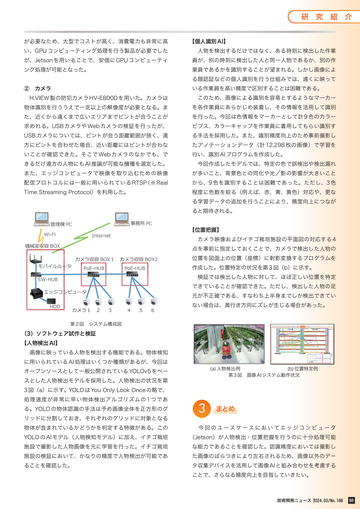
作成した。位置特定の状況を第 3 図(b)に示す。
検証では検出した人物に対して、ほぼ正しい位置を特定
できていることが確認できた。ただし、検出した人物の足
元が不正確である、すなわち上半身までしか検出できてい
ない場合は、奥行き方向にズレが生じる場合があった。
HDD
第 2 図 システム構成図
(3)ソフトウェア試作と検証
【人物検出 AI】
画像に映っている人物を検出する機能である。物体検知
に用いられている AI 処理はいくつか種類があるが、今回は
(a) 人物検出例 (b) 位置特定例
第 3 図 画像 AI システム動作状況
オープンソースとして一般公開されている YOLOv5 をベー
スとした人物検出モデルを採用した。人物検出の状況を第
3 図(a)に示す。YOLO は You Only Look Once の略で、
処理速度が非常に早い物体検出アルゴリズムの 1 つであ
る。YOLO の物体認識の手法は予め画像全体を正方形のグ
リッドに分割しておき、それぞれのグリッドに対象となる
3
まとめ
物体が含まれているかどうかを判定する特徴がある。この
今回のユースケースにおいてエッジコンピュータ
YOLO の AI モデル(人物検知モデル)に加え、イチゴ栽培
(Jetson)が人物検出・位置把握を行うのに十分処理可能
施設で撮影した人物画像を元に学習を行った。イチゴ栽培
な能力であることを確認した。認識精度においては撮影し
施設の検証において、かなりの精度で人物検出が可能であ
た画像のばらつきにより左右されるため、画像以外のデー
ることを確認した。
タ収集デバイスを活用して画像 AI と組み合わせを考慮する
ことで、さらなる精度向上を目指していきたい。
技術開発ニュース 2024.03/No.168
88
�
- ▲TOP