技術開発ニュース No.168
- ページ: 62
-
研 究 成 果
Results of Research Activities
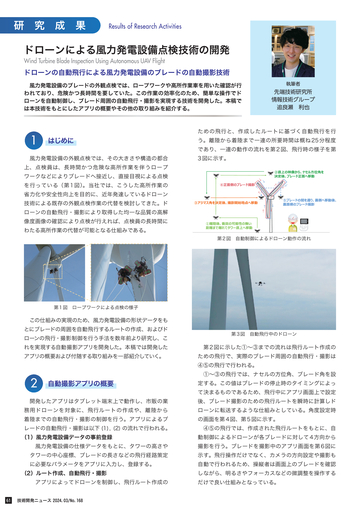
ドローンによる風力発電設備点検技術の開発
Wind Turbine Blade Inspection Using Autonomous UAV Flight
ドローンの自動飛行による風力発電設備のブレードの自動撮影技術
風力発電設備のブレードの外観点検では、ロープワークや高所作業車を用いた確認が行
われており、危険かつ長時間を要していた。この作業の効率化のため、簡単な操作でド
ローンを自動制御し、ブレード周囲の自動飛行・撮影を実現する技術を開発した。本稿で
は本技術をもとにしたアプリの概要やその他の取り組みを紹介する。
1
はじめに
風力発電設備の外観点検では、その大きさや構造の都合
執筆者
先端技術研究所
情報技術グループ
追良瀬 利也
ための飛行と、作成したルートに基づく自動飛行を行
う。離陸から着陸まで一連の所要時間は概ね 25 分程度
であり、一連の動作の流れを第 2 図、飛行時の様子を第
3 図に示す。
上、点検員は、長時間かつ危険な高所作業を伴うロープ
ワークなどによりブレードへ接近し、直接目視による点検
を行っている(第 1 図)。当社では、こうした高所作業の
省力化や安全性向上を目的に、近年発達しているドローン
技術による既存の外観点検作業の代替を検討してきた。ド
ローンの自動飛行・撮影により取得した均一な品質の高解
像度画像の確認により点検が行えれば、点検員の長時間に
わたる高所作業の代替が可能となる仕組みである。
第 2 図 自動制御によるドローン動作の流れ
第 1 図 ロープワークによる点検の様子
この仕組みの実現のため、風力発電設備の形状データをも
とにブレードの周囲を自動飛行するルートの作成、およびド
ローンの飛行・撮影制御を行う手法を数年前より研究し、こ
第 3 図 自動飛行中のドローン
れを実現する自動撮影アプリを開発した。本稿では開発した
第 2 図に示した①~③までの流れは飛行ルート作成の
アプリの概要および付随する取り組みを一部紹介していく。
ための飛行で、実際のブレード周囲の自動飛行・撮影は
④⑤の飛行で行われる。
2
自動撮影アプリの概要
定する。この値はブレードの停止時のタイミングによっ
て決まるものであるため、飛行中にアプリ画面上で設定
開発したアプリはタブレット端末上で動作し、市販の業
後、ブレード撮影のための飛行ルートを瞬時に計算しド
務用ドローンを対象に、飛行ルートの作成や、離陸から
ローンに転送するような仕組みとしている。角度設定時
着陸までの自動飛行・撮影の制御を行う。アプリによるブ
の画面を第 4 図、第 5 図に示す。
レードの自動飛行・撮影は以下 (1), (2) の流れで行われる。
④⑤の飛行では、作成された飛行ルートをもとに、自
(1)風力発電設備データの事前登録
動制御によるドローンが各ブレードに対して 4 方向から
風力発電設備の仕様データをもとに、タワーの高さや
撮影を行う。ブレードを撮影中のアプリ画面を第 6 図に
タワーの中心座標、ブレードの長さなどの飛行経路策定
示す。飛行操作だけでなく、カメラの方向設定や撮影も
に必要なパラメータをアプリに入力し、登録する。
自動で行われるため、操縦者は画面上のブレードを確認
(2)ルート作成、自動飛行・撮影
アプリによってドローンを制御し、飛行ルート作成の
61
①~③の飛行では、ナセルの方位角、ブレード角を設
技術開発ニュース 2024.03/No.168
しながら、明るさやフォーカスなどの微調整を操作する
だけで良い仕組みとなっている。
�
- ▲TOP