技術開発ニュース No.169
- ページ: 20
-
研 究 成 果
20
1.863m の距離となるように設置しており、これは入射波
18
の周期が 3s の場合に入射波と反射波が同調する位置である。
波力発電装置の実験模型にはブレーキを取り付け、波受
板の回転軸に発電負荷に相当する軸トルクをかけられるよ
うにした。また、回転軸には回転角と軸トルクの計測器を
取り付けた。ブレーキで回転軸にかかる負荷を変えて実験
揺動角振幅 (°)
射 板 を 設 置 し て 波 を 反 射 さ せ た。 波 受 板 は 反 射 板 か ら
を行い、波受板の揺動角と軸トルクを計測した。
4
波高0.05m
波高0.1m
波高0.15m
波高0.2m
16
14
12
10
8
6
4
2
0
0
10
20
30
平均軸トルク(N・m)
40
50
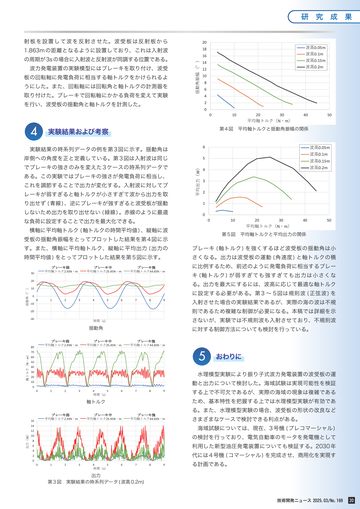
第 4 図 平均軸トルクと揺動角振幅の関係
実験結果および考察
6
岸側への角度を正と定義している。第 3 図は入射波は同じ
5
でブレーキの強さのみを変えた 3 ケースの時系列データで
ある。この実験ではブレーキの強さが発電負荷に相当し、
これを調節することで出力が変化する。入射波に対してブ
レーキが弱すぎると軸トルクが小さすぎて波から出力を取
平均出力(W)
実験結果の時系列データの例を第 3 図に示す。揺動角は
波高0.1m
波高0.15m
波高0.2m
4
3
2
り出せず ( 青線 )、逆にブレーキが強すぎると波受板が揺動
1
しないため出力を取り出せない ( 緑線 )。赤線のように最適
0
な負荷に設定することで出力を最大化できる。
波高0.05m
横軸に平均軸トルク ( 軸トルクの時間平均値 )、縦軸に波
0
10
20
30
平均軸トルク(N・m)
40
50
第 5 図 平均軸トルクと平均出力の関係
受板の揺動角振幅をとってプロットした結果を第 4 図に示
す。また、横軸に平均軸トルク、縦軸に平均出力 ( 出力の
ブレーキ ( 軸トルク ) を強くするほど波受板の揺動角は小
時間平均値 ) をとってプロットした結果を第 5 図に示す。
さくなる。出力は波受板の運動 ( 角速度 ) と軸トルクの積
ブレーキ弱
ブレーキ中
平均軸トルク2.93N・m
30
平均軸トルク25.45N・m
ブレーキ強
平均軸トルク44.65N・m
揺動角(°)
20
0
に設定する必要がある。第 3 ~ 5 図は規則波 ( 正弦波 ) を
0
1
2
3
4
5
6
7
8
9
-30
さないが、実験では不規則波も入射させており、不規則波
時間(s)
揺動角
ブレーキ弱
に対する制御方法についても検討を行っている。
ブレーキ中
平均軸トルク2.93N・m
80
軸トルク(N・m)
入射させた場合の実験結果であるが、実際の海の波は不規
則であるため複雑な制御が必要になる。本稿では詳細を示
-20
平均軸トルク25.45N・m
ブレーキ強
平均軸トルク44.65N・m
5
70
60
50
おわりに
40
水理模型実験により振り子式波力発電装置の波受板の運
30
20
動と出力について検討した。海域試験は実現可能性を検証
10
0
0
1
2
3
4
5
時間(s)
6
7
8
9
ブレーキ弱
ブレーキ中
平均軸トルク2.93N・m
16
平均軸トルク25.45N・m
る。また、水理模型実験の場合、波受板の形状の改良など
ブレーキ強
平均軸トルク44.65N・m
さまざまなケースで検討できる利点がある。
海域試験については、現在、3 号機 ( プレコマーシャル )
14
12
の検討を行っており、電気自動車のモータを発電機として
10
8
利用した新型油圧発電装置についても検証する。2030 年
6
4
代には 4 号機 ( コマーシャル ) を完成させ、商用化を実現す
2
0
する上で不可欠であるが、実際の海域の現象は複雑である
ため、基本特性を把握する上では水理模型実験が有効であ
軸トルク
出力(W)
キ ( 軸トルク ) が弱すぎても強すぎても出力は小さくな
る。出力を最大にするには、波高に応じて最適な軸トルク
10
-10
に比例するため、前述のように発電負荷に相当するブレー
0
1
2
3
4
5
時間(s)
6
7
8
9
る計画である。
出力
第 3 図 実験結果の時系列データ ( 波高 0.2m)
技術開発ニュース 2025.03/No.169
20
�
- ▲TOP