技術開発ニュース No.169
- ページ: 2
- 発明・技術進歩・技術革新・イノベーション ─ ───────────────────────── 4
特集
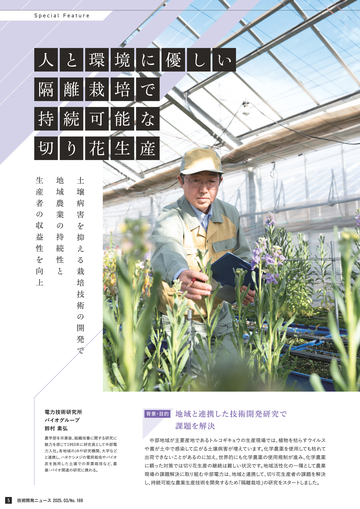
隔離栽培による持続可能な切り花生産 ──────────────────────────── 5・6
専務執行役員 技術開発本部長 野田 英智
電力技術研究所 バイオグループ 鈴村 素弘
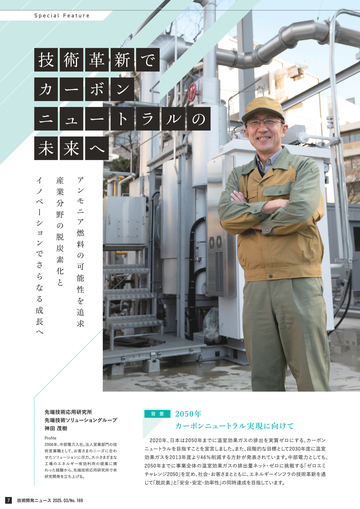
アンモニア混焼小型貫流ボイラの開発に向けて ──────────────────────── 7・8
先端技術応用研究所 先端技術ソリューショングループ 神田 茂樹
CONTENTS
巻頭言
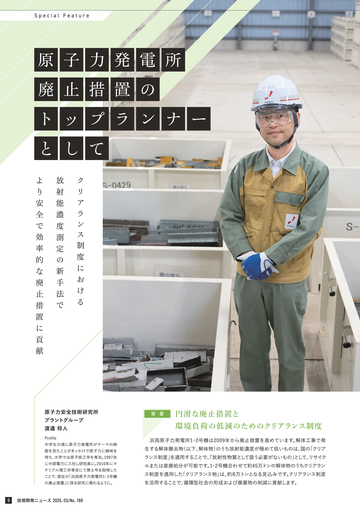
浜岡1、2号機の廃止措置(放射能測定評価)─ ─────────────────────── 9・10
原子力安全技術研究所 プラントグループ 渡邉 将人
特許紹介
中部電力3社が新たに取得した特許権 ───────────────────────────── 11
研究成果
蒸気タービン主要機器の余寿命診断技術開発 ─ ────────────────────── 15・16
配管振動抑制自動提案システムの適用拡大 ───────────────────────── 17・18
波力発電に関する水理模型実験 ─ ──────────────────────────── 19・20
「電気ヒータ式茶焙煎機」の開発 ───────────────────────────── 21・22
自動放射温度計測システム「MiEL Thermo HT」の開発 ─────────────────── 23・24
脱炭素対応水素バーナー式工業炉の開発 ─ ──────────────────────── 25・26
蒸気レス高効率空調機「WETCOMⅡ」の開発 ─ ────────────────────── 27・28
新たな焼結方法と条件最適化による電池材料創製と性能向上の検証 ────────────── 29・30
デジタルツインの検証のためのミニチュア生産ラインの開発と活用 ─────────────── 31・32
RAG を用いたヒューマンエラー事象の対策立案 ─────────────────────── 33・34
画像 AI によるコンプレッサ設備の運用最適への適用 ───────────────────── 35・36
生成 AIを用いた異常画像生成技術 ─ ─────────────────────────── 37・38
人流データ等を利用した空調換気制御システムの開発 ─ ─────────────────── 39・40
暮らしにおける快適性および省エネ技術の定量評価 ─ ──────────────────── 41・42
浜岡1号機圧力容器の中性子照射脆化評価に基づく4号機の長期運転可能期間算定に関する応用研究 ─── 43・44
長尺基礎ボルトの超音波による非破壊検査技術の実機検証 ────────────────── 45・46
ステンレス鋼のすき間構造内部に浸入した塩化物イオン拡散挙動試験装置の開発 ─ ─────── 47・48
津波発生に伴う微気圧変動の観測を活用した津波予測手法の開発 ─────────────── 49・50
大高グリッド試験設備の構築───────────────────────────────── 51
送電鉄塔のボルト・ナット脱落防止具(スマートスプリング)の開発─ ─────────────── 52
IEC 61850プロセスバスを適用した監視制御システムの実導入 ─ ─────────────── 53・54
洞道内単心ケーブルのスネーク方式改善に向けた検討 ─ ─────────────────── 55・56
配電自動化システムのサーバ集約─ ──────────────────────────── 57・58
高効率・高出力アルミ反射ヒータの開発 ─ ───────────────────────── 59・60
技術開発ニュース 2025.03/No.169
2
�
- ▲TOP
- ページ: 3
- AIを用いた三次元点群からの鉄塔等の骨格座標抽出・推定技術の基礎開発 ─────────── 61・62
日射制御可能な営農型太陽光発電の牧草栽培への活用 ─ ────────────────── 63・64
小規模発電プラントの運転データ分析 ───────────────────────────── 65
細胞凍結・培養・評価設備の構築 ─ ───────────────────────────── 66
CONTENTS
研究紹介
加熱手法・条件の最適化 ─ ───────────────────────────────── 67
産業分野における水素燃焼器の紹介 ─ ──────────────────────────── 68
AI による広域 3D 映像生成および活用技術 ─────────────────────────── 69
AI 総合活用システムの開発 ────────────────────────────────── 70
生成 AIを用いた研究報告書検索システム ─ ──────────────────────── 71・72
ダム監査廊内の保守業務をDX化する 揚圧力遠隔計測システムの開発────────────── 73・74
複数カメラによる複数物体追跡技術 ──────────────────────────── 75・76
改良型ハンディ LiDARによる配電設備の3D点群データ取得技術 ─────────────── 77・78
内外ニュース
2024 年度技術研究開発賞選考発表会および第 77 回中部電力技術研究発表会 開催 ─ ─────── 79
「エコdeヒートEX」が “ 超 ”ものづくり部品大賞および省エネ大賞をダブル受賞 ─────────── 83
電気学会 第 55 回電気電子絶縁材料シンポジウムで「矢作賞」を受賞 ─────────────── 83
土木学会「河川技術論文賞」を受賞 ─ ──────────────────────────── 84
」を受賞 ─ ─────────────────────── 84
低温工学・超電導学会「論文賞(技術)
「名古屋 Factory InnoVation Week2024」に出展 ─────────────────────── 84
「中部電力オープンイノベーション 2024」共創パートナーを募集 ────────────────── 85
「テクノフェア2024」を開催 ─────────────────────────────── 85・86
3
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 4
- 巻頭言
発明・技術進歩・技術革新・
イノベーション
野田 英智
Hidetomo Noda
専務執行役員
技術開発本部長
Chief Technology Officer
Chief Standardization Officer
企業が世界の「イノベーション」を先導していると言われていま
す。また、中国は技術力向上に伴い、多数の特許を出願していま
すし、中国製の生成 AI である Deepseek が話題になりました。
それに対して、日本の企業からはイノベーションが生まれにくく、
発明や特許出願もなかなか増えないなんて声も聞かれます。
では、本当に、日本ではイノベーションが全く起こらなかった
のでしょうか。
戦後を振り返ってみると、日本の企業は先進各国の製品を真似
し、より精密かつ高品質で安価な製品を製造する力を付けて、日
本の高度成長を支えてきました。
身近なところで言えば、高度成長期に生まれたセイコーの
クォーツは大きな発明であり、徐々に安価で提供されるようにな
りましたし、1979 年に発売されたソニーのウォークマンは、人々
の音楽の聴き方を変えました。
また、ヤマト運輸は、個人宅配市場に参入し、効率的な配送
ネットワークを構築し、現在の宅配便システムの基盤を作り上げ
ました。
次に、バブル崩壊後の失われた 30 年から現在に至るまではど
うでしょうか。
いくつか事例を挙げてみます。
○メルカリは 中古品 CtoC 販売プラットフォームを提供。
利便性の高いアプリや QR コードを活用した発送システムで
市場を拡大し、新たな中古品 EC 市場を創出しました。
○富士フイルムは、写真フィルム市場の縮小を予測し、化粧品
や医療機器分野へ技術を応用。異分野へのシフトで成功を収
めました。
よく調べたら、もっとあると思います。少なくとも、
“日本で
はイノベーションが起こりにくい”という見方が正しいのか、疑
問に思うこともあります。
一方で、シャープのザウルスというガジェットのように、次代
を先取りした技術が必ずしも成功するとは限りません。ザウルス
は、現在のスマートフォンでできることの多くを、20 数年前に
実現していましたが、スマホの様に世界的なイノベーションを起
こすには至りませんでした。イノベーションには、時代やタイミ
ングも大切な要素なのだと思います。
現在の日本には、発明・技術進歩・技術革新の繰り返しで実力
を蓄えている企業、団体、研究機関は幾多もあり、今はそれがイ
ノベーションという形で表出していないだけで、数年経った際に
大きなイノベーションを起こすものが出てくるかも知れません。
これからの時代は、地球(環境・生態系)と人間の共存共栄を
常に意識し、地球の環境を守りながら、人々の生活をより充実
させていく時代に向かっていくと思います。例えば、カーボン
ニュートラル一つとっても、実現するためには、社会的、技術的
に大きなイノベーションが必要です。
これまで述べてきた発明・技術進歩・技術革新のサイクル、そ
れから、この延長線上に有るかどうかは知れませんが新たなアイ
デアを付加したイノベーションが起こることを、いや、日本発の
イノベーションを起こすことを想像しながら、研究開発に励むの
も、また楽しいのではないでしょうか。
PREFACE
「発明」とは、従来みられなかった新規の物や方法を考え出す
ことです。特許法では、発明は「自然法則を利用した技術的思想
の創作のうち高度なもの」と定義されています。
「技術進歩」とは、科学技術や工学の分野で新しい知識や技術
が発展・改良される過程を指します。これにより、社会や産業に
おける効率性や利便性が向上します。
「技術革新」とは、新しい技術や改良された技術、システム、プ
ロセスを創造・導入することで、社会や経済に大きな変化をもた
らすことを指します。これにより、生産性の向上、新市場の創出、
環境問題への対応などが可能となります。なお、
「イノベーション」
とは異なり、技術そのものの進歩に焦点を当てる点が特徴です。
最後に、
「イノベーション」とは、モノやサービス、ビジネスモ
デルに新しい考え方や技術を取り入れ、新たな価値を創出し、社
会に変革をもたらすプロセスを意味します。これは単なる技術革
新にとどまらず、既存の製品やサービスの改善や全く新しい市場
の開拓も含まれます。私見ではありますが、イノベーションの結
果は企業の業態の大幅な変化をもたらすものもあれば、私たちの
生活様式の大きな変化などに現れてくるものもあると考えます。
なお、現在、
「イノベーション」は、企業にとって成長や競争力を
維持するために不可欠な要素と捉えられています。
一般的な定義に鑑みると、「発明」から「イノベーション」ま
での間には、かなりギャップがあるようにも感じますし、もし
かしたら意外と近しいものかも知れません。「発明」「技術進歩」
「技術革新」
「イノベーション」はシリーズとして起こることもあ
れば、そうでも無い場合もあるようです。
電気事業を振り返ると、日本の旧一般電気事業者が創業してか
ら 70 年を超え、現在では、世界でもトップクラスに短い停電時
間を実現し、高い品質の電気をお客さまにお届けしています。こ
れは、電気事業者として、お客さまのニーズをお伺いしながら、
先人達の日々の研鑽に加え、重電・重工機器メーカーと機器ユー
ザーである電気事業者の発明、技術進歩、技術革新の繰り返しで
成し遂げられてきたものだと思います。
(一方で、ビジネスモデル
自体は 70 年を超えても大きく変わっていないことも事実ですが。
)
正直、日本には世界に誇れる技術(進歩や革新を含む)が未だ
多く存在すると考えています。
例えば、素材分野や生産技術、生産ロボット、故障の少ない自
動車など、日本は高品質な製品を作る技術において世界トップレ
ベルです。また、これらの技術は世界的に見ても相応の市場を有
しています。
これは、これら企業の方々が発明・技術進歩・技術革新のサイ
クルを繰り返し、努力を重ねた結果であり、将来に渡って日本が
自信をもって自慢できるところだと思います。
一方、近年では米国の GAFAM ※を中心とする企業やベンチャー
※ Google、Amazon、Facebook、Apple、Microsoft の頭文字を取った呼び名
技術開発ニュース 2025.03/No.169
4
�
- ▲TOP
- ページ: 5
-
5
技術開発ニュース 2025.03/No.169
�
- ▲TOP

- ページ: 6
- 技術開発ニュース 2025.03/No.169
6
�
- ▲TOP
- ページ: 7
-
7
技術開発ニュース 2025.03/No.169
�
- ▲TOP

- ページ: 8
- 技術開発ニュース 2025.03/No.169
8
�
- ▲TOP
- ページ: 9
-
9
技術開発ニュース 2025.03/No.169
�
- ▲TOP

- ページ: 10
- 技術開発ニュース 2025.03/No.169
10
�
- ▲TOP
- ページ: 11
- 特 許 紹 介
Introduction Patents
特許紹介
中部電力 3 社が新たに取得した特許権(期間:2024 年 1 月~ 2024 年 12 月)
登録番号
登録日
発明の名称
当社 G
発明者
7414231
2024/1/5
マルチモーダル音声認識装置及
びマルチモーダル音声認識方法
瀬川 修
国立大学法人東海国立
大学機構
先端技術応用研究所
情報技術グループ
7418727
2024/1/12
情報処理方法、情報処理システ
ム及びプログラム
丸目 裕樹
山田 竜司
株式会社センシンロボ
ティクス
中部電力パワーグリッド株式会社
エンジニアリングセンター 技術開
発グループ
7424575
2024/1/22
茶葉加工方法及び装置
河村 和彦
森 秀樹
カワサキ機工株式会社
原子力本部 原子力部 企画グループ
7430315
2024/2/2
冷却装置
長 伸朗
株式会社豊電子工業
直本工業株式会社
先端技術応用研究所
先端技術ソリューショングループ
7446188
2024/2/29
加熱装置
赤坂 千春
田中 良
大阪ガス株式会社
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
7449788
2024/3/6
流砂量計測器及び水力発電所の
取水制御装置
後藤 孝臣
村井 寛人
-
電力技術研究所
土木グループ
7466383
2024/4/4
電気機器の異常運転推定システ
ム及びプログラム
志村 欣一
玖村 一雄
-
先端技術応用研究所
情報技術グループ
7487900
2024/5/13
情報処理方法、情報処理システ
ム及びプログラム
丸目 裕樹
山田 竜司
株式会社センシンロボ
ティクス
中部電力パワーグリッド株式会社
エンジニアリングセンター 技術開発
グループ
7488530
2024/5/14
ケーブル架設方法
山本 信孝
株式会社電研社
中部電力パワーグリッド株式会社
電子通信部 設備運用ソリューション
グループ
7488629
2024/5/14
コンプレッサの運転状態分析
装置
竹部 祐介
前田 一真
吉添 一城
7492224
2024/5/21
処理装置及び送風機
長 伸朗
7494038
2024/5/24
エアカーテン装置
中山 浩
青 勇志
-
先端技術応用研究所
先端技術ソリューショングループ
7496757
2024/5/30
地震時無電力自動降下ゲート
森田 堅次
奥田 康三
成瀬 吉央
-
電力技術研究所
土木グループ
画像生成支援装置
瀬川 修
岡本 雄司
株式会社 Geolocation
Technology
株式会社中電シーティー
アイ
先端技術応用研究所
情報技術グループ
情報処理装置及びプログラム
栗山 融
安井 威人
西尾 麻莉
東京電力ホールディン
グス株式会社
関西電力株式会社
株式会社 NTT データ
事業創造本部
情報処理装置及びプログラム
栗山 融
安井 威人
西尾 麻莉
東京電力ホールディン
グス株式会社
関西電力株式会社
株式会社 NTT データ
事業創造本部
7497791
7499050
7499051
11
2024/6/3
2024/6/5
2024/6/5
7509579
2024/6/24
CO2 フリー電力の配分方法
山岸
小山
丹羽
高村
大澤
松井
横川
7507021
2024/6/19
容積算出装置及び重量算出装置
棚橋 尚貴
技術開発ニュース 2025.03/No.169
共有権利者
-
株式会社豊電子工業
直本工業株式会社
主管部署
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
先端技術応用研究所
先端技術ソリューショングループ
明日香
顕寛
智哉
吉浩
耕平
俊彰
敬弘
-
中部電力ミライズ株式会社
カーボンニュートラル推進本部 エネ
ルギープラットフォーム構築部
-
先端技術応用研究所
先端技術ソリューショングループ
�
- ▲TOP
- ページ: 12
-
特 許 紹 介
登録番号
登録日
7514686
2024/7/3
当社 G
発明者
共有権利者
主管部署
貫通穴検査装置
赤坂 千春
羽根 佑歩
高木 健富
-
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
西 政紀
-
事業創造本部
発明の名称
7519241
2024/7/10
ライフスタイル提供プログラ
ム、ライフスタイル提供装置、
及びライフスタイル提供シス
テム
7536617
2024/8/9
高圧流体流入阻止用片開き扉体
の配置構造
星野 賢治
内藤 良介之
7539438
2024/8/15
開閉装置監視システム
山田 比呂志
伊藤 保則
金森 貴之
-
中部電力パワーグリッド株式会社
エンジニアリングセンター 技術開発
グループ
-
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
章浩
祐平
和弘
卓矢
鹿島建設株式会社
株式会社クマヒラ
原子力本部 原子力部 企画グループ
7548667
2024/9/2
局所加熱用誘導加熱装置
竹内
池野
松下
中谷
7549309
2024/9/3
導線の導通確認方法
鹿島 直二
7554027
2024/9/10
異常運転推定システム及びプロ
グラム
志村 欣一
玖村 一雄
-
中部電力ミライズ株式会社
リビング営業本部 リビング営業第
2部
7559118
2024/9/20
情報処理装置、情報処理方法及
びプログラム
片岡 裕貴
村井 瑛
株式会社 三菱総合研究所
中部電力パワーグリッド株式会社
系統運用部 系統技術グループ
7560710
2024/9/25
熱処理システム
棚橋 尚貴
株式会社エコム
先端技術応用研究所
先端技術ソリューショングループ
東京電力ホールディン
グス株式会社
関西電力株式会社
株式会社 NTT データ
事業創造本部
電力技術研究所
機械グループ
学校法人中部大学
7573375
2024/10/17
情報処理装置及びプログラム
栗山 融
安井 威人
西尾 麻莉
7573826
2024/10/18
情報処理システム、情報処理方
法及びプログラム
丸目 裕樹
近藤 史彦
株式会社センシンロボ
ティクス
中部電力パワーグリッド株式会社
エンジニアリングセンター 技術開発
グループ
7586789
2024/11/11
樹脂成形方法
赤坂 千春
岡墻 慎祐
田中 良
トヨタ自動車株式会社
株式会社 micro - AMS
中部電力ミライズ株式会社
法人営業本部 ソリューションセンター
7590725
2024/11/19
素線切れ検出方法及び素線切れ
検出システム
鹿島 直二
アルビト株式会社
電力技術研究所
機械グループ
7592420
2024/11/22
セラミック基複合材料部材、セ
ラミック基複合材料部材被覆
体、セラミック基複合材料部材
の製造方法及びセラミック基複
合材料部材被覆体の製造方法
三摩 達雄
竹内 章浩
7605417
2024/12/16
情報処理方法、情報処理システ
ム及びプログラム
丸目 裕樹
山田 竜司
先端技術応用研究所
先端技術ソリューショングループ
-
株式会社センシンロボ
ティクス
中部電力パワーグリッド株式会社
エンジニアリングセンター 技術開発
グループ
当社が新たに取得した特許権の紹介
特許の登録番号・名称
注視点
注視点
特許第 7414231 号・マルチモーダル音声認識装置
及びマルチモーダル音声認識方法
注視点
相関関係
特許の概要
音声情報に加え発話時の注視点周辺の画像を用いる
マルチモーダル音声認識手法。両者の情報を関連付
けて学習し、音声認識の精度を向上
音声情報
(例)作業員がデジタルメータを注視しなが
ら「圧力正常確認」と発話。正確に認
識された音声が画面表示されている
音声情報と注視点周辺の画像による音声認識の精度向上
技術開発ニュース 2025.03/No.169
12
�
- ▲TOP
- ページ: 13
-
特 許 紹 介
Introduction Patents
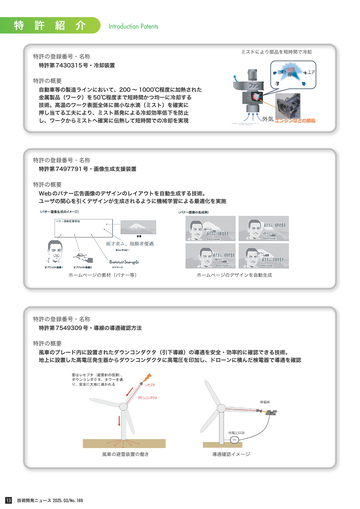
ミストにより部品を短時間で冷却
特許の登録番号・名称
特許第 7430315 号・冷却装置
特許の概要
ファン
自動車等の製造ラインにおいて、200 ~ 1000℃程度に加熱された
金属製品(ワーク)を 50℃程度まで短時間かつ均一に冷却する
技術。高温のワーク表面全体に微小な水滴(ミスト)を確実に
押し当てる工夫により、ミスト蒸発による冷却効率低下を防止
し、ワークからミストへ確実に伝熱して短時間での冷却を実現
C o p y r i g h t © C H U B U E l e c t r i c P o we r C o . , I n c .
All Rights Reserved.
外気 エンジンなどの部品
1
特許の登録番号・名称
特許第 7497791 号・画像生成支援装置
特許の概要
Web のバナー広告画像のデザインのレイアウトを自動生成する技術。
ユーザの関心を引くデザインが生成されるように機械学習による最適化を実施
ホームページの素材(バナー等)
ホームページのデザインを自動生成
特許の登録番号・名称
特許第 7549309 号・導線の導通確認方法
特許の概要
風車のブレード内に設置されたダウンコンダクタ(引下導線)の導通を安全・効率的に確認できる技術。
地上に設置した高電圧発生器からダウンコンダクタに高電圧を印加し、ドローンに積んだ検電器で導通を確認
雷はレセプタ(避雷針の役割)、
ダウンコンダクタ、タワーを通
り、安全に大地に導かれる
13
技術開発ニュース 2025.03/No.169
風車の避雷装置の働き
導通確認イメージ
�
- ▲TOP
- ページ: 14
- 特 許 紹 介
特許の登録番号・名称
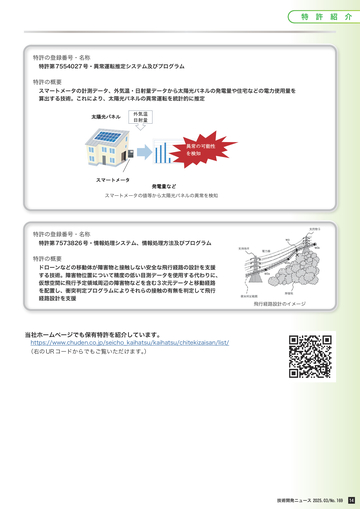
特許第 7554027 号・異常運転推定システム及びプログラム
特許の概要
スマートメータの計測データ、外気温・日射量データから太陽光パネルの発電量や住宅などの電力使用量を
算出する技術。これにより、太陽光パネルの異常運転を統計的に推定
太陽光パネル
外気温
日射量
異常の可能性
を検知
スマートメータ
発電量など
スマートメータの値等から太陽光パネルの異常を検知
特許の登録番号・名称
特許第 7573826 号・情報処理システム、情報処理方法及びプログラム
特許の概要
ドローンなどの移動体が障害物と接触しない安全な飛行経路の設計を支援
する技術。障害物位置について精度の低い目測データを使用する代わりに、
仮想空間に飛行予定領域周辺の障害物などを含む 3 次元データと移動経路
を配置し、衝突判定プログラムによりそれらの接触の有無を判定して飛行
経路設計を支援
飛行経路設計のイメージ
当社ホームページでも保有特許を紹介しています。
https://www.chuden.co.jp/seicho_kaihatsu/kaihatsu/chitekizaisan/list/
(右の UR コードからでもご覧いただけます。
)
技術開発ニュース 2025.03/No.169
14
�
- ▲TOP
- ページ: 15
-
研 究 成 果
Results of Research Activities
蒸気タービン主要機器の余寿命診断技術開発
Development of Remaining Life Assessment Technology for Major Steam Turbine Components
蒸気タービン主要機器の「余寿命診断技術の手の内化」による
保守コスト最小化への挑戦
執筆者
長期にわたり、従来手法で寿命到達と判断された蒸気タービンローター等主要機器の破
壊調査を積み重ねるとともに、材料の使用環境に基づいた加速劣化試験により、個々の材
料の劣化特性を明らかにしてきた。これらの取組みにより、機器ごとの弱点部位や寿命支
配因子、材料劣化特性を詳細に把握することができ、余寿命診断技術の手の内化に成功
した。
電力技術研究所
材料化学グループ
小林 大輔
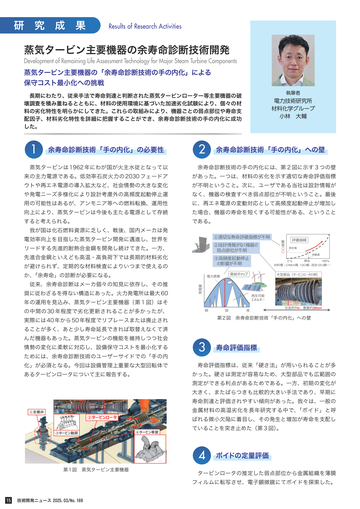
1
余寿命診断技術「手の内化」の必要性
2
余寿命診断技術「手の内化」への壁
余寿命診断技術の手の内化には、第2図に示す3つの壁
来の主力電源である。低効率石炭火力の 2030 フェードア
があった。一つは、材料の劣化を示す適切な寿命評価指標
ウトや再エネ電源の導入拡大など、社会情勢の大きな変化
が不明ということ。次に、ユーザである当社は設計情報が
や発電ニーズ多様化により設計考慮外の高頻度起動停止運
なく、機器の検査すべき弱点部位が不明ということ。最後
用の可能性はあるが、アンモニア等への燃料転換、運用性
に、再エネ電源の変動対応として高頻度起動停止が増加し
向上により、蒸気タービンは今後も主たる電源として存続
た場合、機器の寿命を短くする可能性がある、ということ
すると考えられる。
である。
我が国は化石燃料資源に乏しく、戦後、国内メーカは発
①適切な寿命評価指標が不明
電効率向上を目指した蒸気タービン開発に邁進し、世界を
②設計情報がなく機器の
弱点部位が不明
リードする先進的耐熱合金鋼を開発し続けてきた。一方、
先進合金鋼といえども高温・高負荷下では長期的材料劣化
③高頻度起動停止
の影響が不明
が避けられず、定期的な材料検査によりいつまで使えるの
か、「余寿命」の診断が必要になる。
奨に従わざるを得ない構造にあった。火力発電所は最大 60
発電量
従来、余寿命診断はメーカ個々の知見に依存し、その推
評価値
大型部品(タービンロータの例)
再生可能
エネルギー
年の運用を見込み、蒸気タービン主要機器(第1図)はそ
の中間の 30 年程度で劣化更新されることが多かったが、
評価曲線
測定値
0%
寿命
100%
材料種︓CrMoV鋼、12Cr鋼、改良12Cr鋼・・・
需給ギャップ
電力需要
〇〇指標
蒸気タービンは 1962 年にわが国が火主水従となって以
朝
昼
夜
全長約7m、重量約20ton
第 2 図 余寿命診断技術「手の内化」への壁
実際には 40 年から 50 年程度でリプレースまたは廃止され
ることが多く、あと少し寿命延長できれば取替えなくて済
んだ機器もあった。蒸気タービンの機能を維持しつつ社会
情勢の変化に柔軟に対応し、設備保守コストを最小化する
ためには、余寿命診断技術のユーザーサイドでの「手の内
3
寿命評価指標
化」が必須となる。今回は設備管理上重要な大型回転体で
寿命評価指標は、従来「硬さ法」が用いられることが多
あるタービンロータについて主に報告する。
かった。硬さは測定が容易なため、大型部品でも広範囲の
測定ができる利点があるためである。一方、初期の変化が
大きく、またばらつきも比較的大きい手法であり、早期に
寿命到達と評価されやすい傾向があった。我々は、一般の
金属材料の高温劣化を長年研究する中で、「ボイド」と呼
①主要弁
②タービンロータ
③タービン動翼
ばれる微小欠陥に着目し、その発生と増加が寿命を支配し
④タービン車室
ていることを突き止めた(第3図)。
4
第 1 図 蒸気タービン主要機器
ボイドの定量評価
タービンロータの推定した弱点部位から金属組織を薄膜
フィルムに転写させ、電子顕微鏡にてボイドを探索した。
15
技術開発ニュース 2025.03/No.169
�
- ▲TOP

- ページ: 16
-
研 究 成 果
劣化
異なる発電所の最もボイドが出にくい先進
合金鋼製のタービンロータで材料検査を実施
ボイド
イメージ
イメージ
•
•
イメージ
ボイドの発生と増加が寿命を支配
使用限界
予測した箇所にボイド発見
新しいボイド指標により寿命を
定量評価(寿命延長を実現)
605℃ 100MPa
ボイド
新ボイド指標
5μm
結晶
粒界
ボイド(約1μm)
10µm
電子顕微鏡によるボイド探索
0
今後取替不要
585℃ 150MPa
570℃ 200MPa
0%
電子顕微鏡写真
第 3 図 蒸気タービンロータのボイド観察
0.2
寿命
寿命
0.4
0.6
0.8
1
100%
発電所での検査状況
約1週間かけて、初めて、先進合金鋼からボイドを発見す
ることができた。しかし、見られたボイドの数は数個と少
なく、材料が劣化しているのかしていないのか判断が難し
く、寿命の定量評価に課題が残った。
ボイド自体は発生することが確認できたため、時間と費
用をかけ異なる製造メーカの主な合金鋼6種類について、
実機環境を加速再現した延べ 20 年相当におよぶ長期材料
劣化試験と、人工劣化材総数約 100 点について、ボイドの
発生時期やその形態の特徴に関して延べ 100 週間研究した。
その結果、先進合金鋼特有の現象として、ボイドの発生
数は少ないが、一つのボイドが大きく成長する特徴を見出
した。ボイドの個数、または大きさを評価した面積率のど
(翼部は未描写)
2: 外表面
ちらかでは十分ではなく、その両者を併用した新たな評価
解析による寿命消費分布
1: 中心孔
指標を考案することで、寿命全般にわたって高精度に評価
予測した2箇所でボイドを発見
できることがわかった。
回転中心
第 4 図 タービンロータの材料検査状況および数値解析結果
5
再現性確認と技術確立
第 2 の壁、設計情報がなく各機器の弱点部位が不明であ
6
成果、まとめ
ることについて、実機運転データおよび独自の寿命評価ア
本研究では、蒸気タービン主要機器の余寿命診断技術を
ルゴリズムを組み込んだ数値解析により、検査が可能な弱
開発し、ユーザーサイドでの「手の内化」に成功した。具
点部位を特定することができた。第 3 の壁、高頻度起動停
体的には、適切な寿命評価指標が不明であったことに対し
止の影響について、多数の材料試験の結果、現実的な実機
て、ボイドの成長に着目した新しい寿命評価指標を確立で
稼働条件ではその影響は無視し得ることを明らかにできた。
きた。また、検査すべき弱点部位や今後の高頻度起動停止
以上の開発技術に関する再現性確認のため、異なる発電
の影響についても明らかにすることができた。
所における最もボイドが出にくい先進合金鋼製のタービン
本研究成果は ( 株 )JERA 西日本の全てとなる 10 発電所
ロータで材料検査を行った(第 4 図)。その結果、数値解析
および東日本 7 発電所相当に適用可能で、その内 4 発電所
にて予測した第 1、2 番目の弱点部位において劣化度に応
相当については、すでにロータ以外の翼、車室、主要弁を
じたボイドを確認するとともに、新しいボイド指標により
含めて余寿命診断を実施済みで、寿命延長を実現している。
寿命を定量評価し、十分な余寿命を有すると診断でき、今
後取替不要とすることができた。以上の結果、ボイド検査
による新しい寿命評価指標が確立できた。
技術開発ニュース 2025.03/No.169
16
�
- ▲TOP
- ページ: 17
-
研 究 成 果
Results of Research Activities
配管振動抑制自動提案システムの適用拡大
Enhancement of the application of an Automatic Piping Vibration Control Proposal System
配管振動を抑えられる固定サポート位置の自動提案
執筆者
火力発電所等の小口径配管振動に対して、問題のある振動かどうか短時間で判別し、問
題があれば振動を抑えることができる固定サポート位置を早期かつ安価に自動提案できる
手法(システム)を開発した。
開発および最適化を進め、実機での実証を積み重ねてきた。社内外への適用拡大を進め
ている技術について報告する。
電力技術研究所
材料化学グループ
佐藤 克良・宮岡 俊
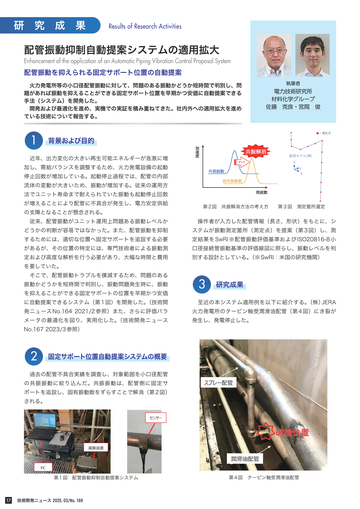
1
●:測定点
背景および目的
共振解消
近年、出力変化の大きい再生可能エネルギーが急激に増
加し、需給バランスを調整するため、火力発電設備の起動
Y
外部振動
停止回数が増加している。起動停止過程では、配管の内部
X
固有振動数
流体の変動が大きいため、振動が増加する。従来の運用方
周波数
法でユニット寿命まで耐えられていた振動も起動停止回数
が増えることにより配管に不具合が発生し、電力安定供給
の支障となることが懸念される。
配管モデル(例)
Z
ずらす
第 2 図 共振解消方法の考え方 第3図 測定箇所選定
従来、配管振動がユニット運用上問題ある振動レベルか
操作者が入力した配管情報(長さ、形状)をもとに、シ
どうかの判断が容易ではなかった。また、配管振動を抑制
ステムが振動測定箇所(測定点)を提案(第 3 図)し、測
するためには、適切な位置へ固定サポートを追設する必要
定結果を SwRI ※配管振動評価基準および ISO20816‐8 小
があるが、その位置の特定には、専門技術者による振動測
口径接続管振動基準の評価線図に照らし、振動レベルを判
定および高度な解析を行う必要があり、大幅な時間と費用
別する設計としている。(※ SwRI:米国の研究機関)
を要していた。
そこで、配管振動トラブルを撲滅するため、問題のある
振動かどうかを短時間で判別し、振動問題発生時に、振動
を抑えることができる固定サポートの位置を早期かつ安価
3
研究成果
に自動提案できるシステム(第 1 図)を開発した。(技術開
至近の本システム適用例を以下に紹介する。(株)JERA
発ニュース No.164 2021/2 参照)また、さらに評価パラ
火力発電所のタービン軸受潤滑油配管(第 4 図)にき裂が
メータの最適化を図り、実用化した。
(技術開発ニュース
発生し、発電停止した。
No.167 2023/3 参照)
2
固定サポート位置自動提案システムの概要
過去の配管不具合実績を調査し、対象範囲を小口径配管
の共振振動に絞り込んだ。共振振動は、配管側に固定サ
ポートを追設し、固有振動数をずらすことで解消(第 2 図)
される。
センサー
演算装置
PC
第 1 図 配管振動抑制自動提案システム
17
技術開発ニュース 2025.03/No.169
第 4 図 タービン軸受潤滑油配管
�
- ▲TOP
- ページ: 18
-
研 究 成 果
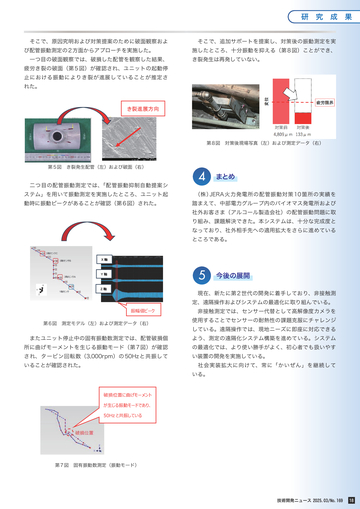
そこで、原因究明および対策提案のために破面観察およ
そこで、追加サポートを提案し、対策後の振動測定を実
び配管振動測定の 2 方面からアプローチを実施した。
施したところ、十分振動を抑える(第 8 図)ことができ、
一つ目の破面観察では、破損した配管を観察した結果、
き裂発生は再発していない。
疲労き裂の破面(第 5 図)が確認され、ユニットの起動停
止における振動によりき裂が進展していることが推定さ
れた。
き裂進展方向
第 8 図 対策後現場写真(左)および測定データ(右)
第 5 図 き裂発生配管(左)および破面(右)
二つ目の配管振動測定では、「配管振動抑制自動提案シ
4
まとめ
ステム」を用いて振動測定を実施したところ、ユニット起
(株)JERA 火力発電所の配管振動対策 10 箇所の実績を
動時に振動ピークがあることが確認(第 6 図)された。
踏まえて、中部電力グループ内のバイオマス発電所および
社外お客さま(アルコール製造会社)の配管振動問題に取
り組み、課題解決できた。本システムは、十分な完成度と
なっており、社外相手先への適用拡大をさらに進めている
ところである。
X軸
5
Y軸
今後の展開
X
Z軸
Y
現在、新たに第 2 世代の開発に着手しており、非接触測
Z
定、遠隔操作およびシステムの最適化に取り組んでいる。
振幅値ピーク
第 6 図 測定モデル(左)および測定データ(右)
非接触測定では、センサー代替として高解像度カメラを
使用することでセンサーの耐熱性の課題克服にチャレンジ
している。遠隔操作では、現地ニーズに即座に対応できる
またユニット停止中の固有振動数測定では、配管破損個
よう、測定の遠隔化システム構築を進めている。システム
所に曲げモーメントを生じる振動モード(第 7 図)が確認
の最適化では、より使い勝手がよく、初心者でも扱いやす
され、タービン回転数(3,000rpm)の 50Hz と共振して
い装置の開発を実施している。
いることが確認された。
社会実装拡大に向けて、常に「かいぜん」を継続して
いる。
破損位置に曲げモーメント
が生じる振動モードであり、
50Hz と共振している
第 7 図 固有振動数測定(振動モード)
技術開発ニュース 2025.03/No.169
18
�
- ▲TOP
- ページ: 19
-
研 究 成 果
Results of Research Activities
波力発電に関する水理模型実験
Experimental study of pendulum type wave energy converter
水理模型実験による新しい発電技術の開発
執筆者
カーボンニュートラルの実現のためには多様な再生可能エネルギーを導入していく必要
がある。そのための取り組みの一つとして、波力発電の開発を東京大学との共同研究によ
り進めている。本稿では、波力発電の高効率化を目的として実施した水理模型実験につい
て紹介する。
電力技術研究所
土木グループ
小林 豪毅・杉山 陽一
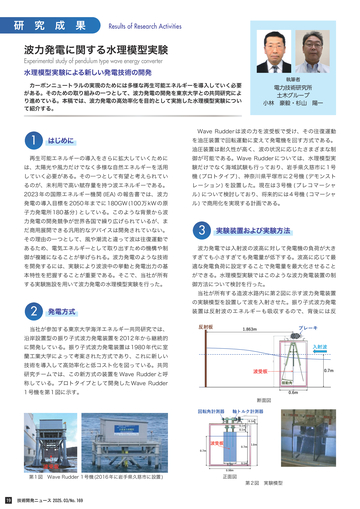
1
はじめに
Wave Rudder は波の力を波受板で受け、その往復運動
を油圧装置で回転運動に変えて発電機を回す方式である。
油圧装置は耐久性が高く、波の状況に応じたさまざまな制
再生可能エネルギーの導入をさらに拡大していくために
御が可能である。Wave Rudder については、水理模型実
は、太陽光や風力だけでなく多様な自然エネルギーを活用
験だけでなく海域試験も行っており、岩手県久慈市に 1 号
していく必要がある。その一つとして有望と考えられてい
機 ( プロトタイプ )、神奈川県平塚市に 2 号機 ( デモンスト
るのが、未利用で高い賦存量を持つ波エネルギーである。
レーション ) を設置した。現在は 3 号機 ( プレコマーシャ
2023 年の国際エネルギー機関 (IEA) の報告書では、波力
ル ) について検討しており、将来的には 4 号機 ( コマーシャ
発電の導入目標を 2050 年までに 180GW(100 万 kW の原
ル ) で商用化を実現する計画である。
子力発電所 180 基分 ) としている。このような背景から波
力発電の開発競争が世界各国で繰り広げられているが、ま
だ商用展開できる汎用的なデバイスは開発されていない。
その理由の一つとして、風や潮流と違って波は往復運動で
3
実験装置および実験方法
あるため、電気エネルギーとして取り出すための機構や制
波力発電では入射波の波高に対して発電機の負荷が大き
御が複雑になることが挙げられる。波力発電のような技術
すぎても小さすぎても発電量が低下する。波高に応じて最
を開発するには、実験により波浪中の挙動と発電出力の基
適な発電負荷に設定することで発電量を最大化させること
本特性を把握することが重要である。そこで、当社が所有
ができる。水理模型実験ではこのような波力発電装置の制
する実験施設を用いて波力発電の水理模型実験を行った。
御方法について検討を行った。
当社が所有する造波水路内に第 2 図に示す波力発電装置
2
発電方式
当社が参加する東京大学海洋エネルギー共同研究では、
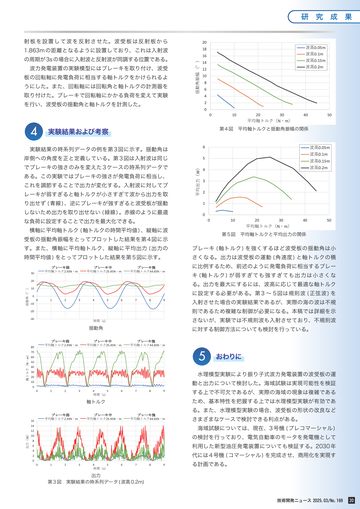
の実験模型を設置して波を入射させた。振り子式波力発電
装置は反射波のエネルギーも吸収するので、背後には反
反射板
ブレーキ
1.863m
沿岸設置型の振り子式波力発電装置を 2012 年から継続的
入射波
に開発している。振り子式波力発電装置は 1980 年代に室
蘭工業大学によって考案された方式であり、これに新しい
技術を導入して高効率化と低コスト化を図っている。共同
0.7m
波受板
研究チームでは、この新方式の装置を Wave Rudder と呼
称している。プロトタイプとして開発した Wave Rudder
揺動角
1 号機を第 1 図に示す。
0.6m
断面図
回転角計測器
軸トルク計測器
0.1m
0.1m
0.1m
波受板
0.7m
0.7m
波受板
第 1 図 Wave Rudder 1 号機 (2016 年に岩手県久慈市に設置 )
19
技術開発ニュース 2025.03/No.169
0.3m
1.0m
0.1m
0.98m
正面図
第 2 図 実験模型
�
- ▲TOP
- ページ: 20
-
研 究 成 果
20
1.863m の距離となるように設置しており、これは入射波
18
の周期が 3s の場合に入射波と反射波が同調する位置である。
波力発電装置の実験模型にはブレーキを取り付け、波受
板の回転軸に発電負荷に相当する軸トルクをかけられるよ
うにした。また、回転軸には回転角と軸トルクの計測器を
取り付けた。ブレーキで回転軸にかかる負荷を変えて実験
揺動角振幅 (°)
射 板 を 設 置 し て 波 を 反 射 さ せ た。 波 受 板 は 反 射 板 か ら
を行い、波受板の揺動角と軸トルクを計測した。
4
波高0.05m
波高0.1m
波高0.15m
波高0.2m
16
14
12
10
8
6
4
2
0
0
10
20
30
平均軸トルク(N・m)
40
50
第 4 図 平均軸トルクと揺動角振幅の関係
実験結果および考察
6
岸側への角度を正と定義している。第 3 図は入射波は同じ
5
でブレーキの強さのみを変えた 3 ケースの時系列データで
ある。この実験ではブレーキの強さが発電負荷に相当し、
これを調節することで出力が変化する。入射波に対してブ
レーキが弱すぎると軸トルクが小さすぎて波から出力を取
平均出力(W)
実験結果の時系列データの例を第 3 図に示す。揺動角は
波高0.1m
波高0.15m
波高0.2m
4
3
2
り出せず ( 青線 )、逆にブレーキが強すぎると波受板が揺動
1
しないため出力を取り出せない ( 緑線 )。赤線のように最適
0
な負荷に設定することで出力を最大化できる。
波高0.05m
横軸に平均軸トルク ( 軸トルクの時間平均値 )、縦軸に波
0
10
20
30
平均軸トルク(N・m)
40
50
第 5 図 平均軸トルクと平均出力の関係
受板の揺動角振幅をとってプロットした結果を第 4 図に示
す。また、横軸に平均軸トルク、縦軸に平均出力 ( 出力の
ブレーキ ( 軸トルク ) を強くするほど波受板の揺動角は小
時間平均値 ) をとってプロットした結果を第 5 図に示す。
さくなる。出力は波受板の運動 ( 角速度 ) と軸トルクの積
ブレーキ弱
ブレーキ中
平均軸トルク2.93N・m
30
平均軸トルク25.45N・m
ブレーキ強
平均軸トルク44.65N・m
揺動角(°)
20
0
に設定する必要がある。第 3 ~ 5 図は規則波 ( 正弦波 ) を
0
1
2
3
4
5
6
7
8
9
-30
さないが、実験では不規則波も入射させており、不規則波
時間(s)
揺動角
ブレーキ弱
に対する制御方法についても検討を行っている。
ブレーキ中
平均軸トルク2.93N・m
80
軸トルク(N・m)
入射させた場合の実験結果であるが、実際の海の波は不規
則であるため複雑な制御が必要になる。本稿では詳細を示
-20
平均軸トルク25.45N・m
ブレーキ強
平均軸トルク44.65N・m
5
70
60
50
おわりに
40
水理模型実験により振り子式波力発電装置の波受板の運
30
20
動と出力について検討した。海域試験は実現可能性を検証
10
0
0
1
2
3
4
5
時間(s)
6
7
8
9
ブレーキ弱
ブレーキ中
平均軸トルク2.93N・m
16
平均軸トルク25.45N・m
る。また、水理模型実験の場合、波受板の形状の改良など
ブレーキ強
平均軸トルク44.65N・m
さまざまなケースで検討できる利点がある。
海域試験については、現在、3 号機 ( プレコマーシャル )
14
12
の検討を行っており、電気自動車のモータを発電機として
10
8
利用した新型油圧発電装置についても検証する。2030 年
6
4
代には 4 号機 ( コマーシャル ) を完成させ、商用化を実現す
2
0
する上で不可欠であるが、実際の海域の現象は複雑である
ため、基本特性を把握する上では水理模型実験が有効であ
軸トルク
出力(W)
キ ( 軸トルク ) が弱すぎても強すぎても出力は小さくな
る。出力を最大にするには、波高に応じて最適な軸トルク
10
-10
に比例するため、前述のように発電負荷に相当するブレー
0
1
2
3
4
5
時間(s)
6
7
8
9
る計画である。
出力
第 3 図 実験結果の時系列データ ( 波高 0.2m)
技術開発ニュース 2025.03/No.169
20
�
- ▲TOP
- ページ: 21
-
研 究 成 果
Results of Research Activities
「電気ヒータ式茶焙煎機」の開発
Development of the electric heater type tea roasting machine
~業界初の電気による焙煎の取り組み~
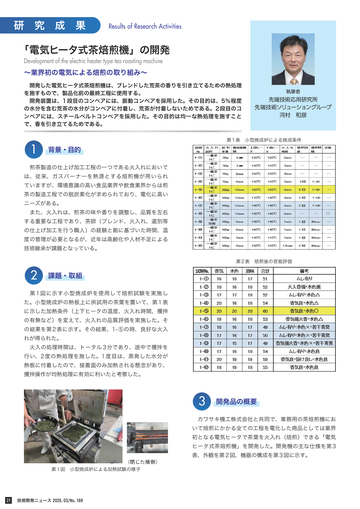
開発した電気ヒータ式茶焙煎機は、ブレンドした荒茶の香りを引き立てるための熱処理
を施すもので、製品化前の最終工程に使用する。
開発装置は、1 段目のコンベアには、振動コンベアを採用した。その目的は、5%程度
の水分を含む荒茶の水分がコンベアに付着し、荒茶が付着しないためである。2 段目のコ
ンベアには、スチールベルトコンベアを採用した。その目的は均一な熱処理を施すこと
で、香を引き立てるためである。
執筆者
先端技術応用研究所
先端技術ソリューショングループ
河村 和彦
1
第 1 表 小型焼成炉による焼成条件
背景・目的
煎茶製造の仕上げ加工工程の一つである火入れにおいて
は、従来、ガスバーナーを熱源とする焙煎機が用いられ
ていますが、環境意識の高い食品業界や飲食業界からは煎
茶の製造工程での脱炭素化が求められており、電化に高い
ニーズがある。
また、火入れは、煎茶の味や香りを調整し、品質を左右
する重要な工程であり、茶師(ブレンド、火入れ、選別等
の仕上げ加工を行う職人)の経験と勘に基づいた時間、温
度の管理が必要となるが、近年は高齢化や人材不足による
技術継承が課題となっている。
第 2 表 焙煎後の官能評価
2
課題・取組
第 1 図に示す小型焼成炉を使用して焙煎試験を実施し
た。小型焼成炉の熱板上に供試用の茶葉を置いて、第 1 表
に示した加熱条件(上下ヒータの温度、火入れ時間、攪拌
の有無など)を変えて、火入れの品質評価を実施した。そ
の結果を第 2 表に示す。その結果、1- ⑤の時、良好な火入
れが得られた。
火入の処理時間は、トータル 3 分であり、途中で攪拌を
行い、2 度の熱処理を施した。1 度目は、蒸発した水分が
熱板に付着したので、接着面のみ加熱される懸念があり、
攪拌操作が均熱処理に有効に利いたと考察した。
3
開発品の概要
カワサキ機工株式会社と共同で、業務用の茶焙煎機にお
いて焙煎にかかる全ての工程を電化した商品としては業界
初となる電気ヒータで茶葉を火入れ(焙煎)できる「電気
ヒータ式茶焙煎機」を開発した。開発機の主な仕様を第 3
表、外観を第 2 図、機器の構成を第 3 図に示す。
(閉じた横側)
第 1 図 小型焼成炉による加熱試験の様子
21
技術開発ニュース 2025.03/No.169
�
- ▲TOP

- ページ: 22
-
研 究 成 果
(1)開発品の特徴
・電化によるエネルギー効率向上
電気ヒータの非引火性を活かし、ヒータをコンベア面
に接近させることで、より効率的に茶葉に熱を伝達する
ことが可能
・誰でも理想的な火入れを実現
種類の異なった 2 段式のコンベアの採用や温度センシ
4
経済性の評価
開発機の経済性を評価するため、イニシャルコストおよ
びランニングコストをモデル試算した。試算条件とその結
果を第 3 表、その抜粋を第 4 表に示す。
ング機能・遠赤外線ヒータの搭載により、茶葉への加熱
第 3 図 コスト試算表
ムラを低減させることができ、品質の高い煎茶(茶葉の
香りと味)を安定的に生産することが可能
第 3 表 電気ヒータ式茶焙煎機の主な仕様
第 4 図 経済性の評価
5
まとめ
本開発機は、熱源をガスから電化したことにより、エネ
ルギー効率を向上するとともに、生産者が非化石証書等を
活用することで、CO2 フリーでの煎茶製造という付加価値
の向上が可能となる。
また、温度センシング機能による電気ヒータとコンベア
第 2 図 電気ヒータ式茶焙煎機の外観
の最適制御により、茶葉の品温を一定に制御し、経験の浅
い人でも、安定的な火入れや火入れ具合の調整が可能とな
る。これにより、業界が抱える技術継承の課題解決に取り
組んでいく。
6
今後の展開
今後は、IoT 化に向けたセンシング機構を組み込むこと
で、茶師の作業を補助する仕組みを検証していく。また、
脱炭素や地域社会の課題解決に貢献する新たな価値の創出
第 3 図 電気ヒータ式茶焙煎機の構成図
に向けた研究開発を進め、お客さまや社会の発展に貢献し
ていく。
技術開発ニュース 2025.03/No.169
22
�
- ▲TOP

- ページ: 23
-
研 究 成 果
Results of Research Activities
自動放射温度計測システム
「MiEL Thermo HT」の開発
ミエル
サーモ
エイチティー
Development of Automatic Radiation Temperature Measurement System“MiEL Thermo HT”
執筆者
鋳造工程の自動温度計測により生産性向上と品質管理を実現
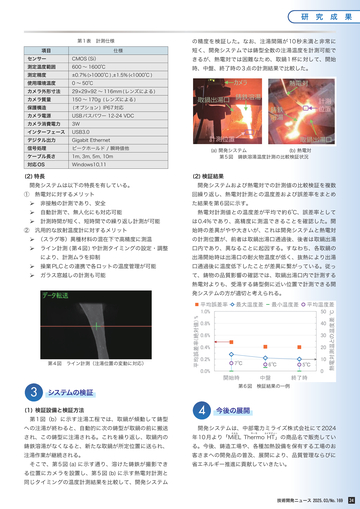
高熱環境下での被加熱物の測温は、品質管理の観点でとても重要である。特に 1400℃
以上にもなる溶けた鋳鉄の測温は、市販放射温度計では誤差が大きいため、熱電対を用い
た手作業で行われており、自動化や無人化が求められていた。そこで、鋳鉄溶湯の温度計
測にも適用可能な高精度の自動放射温度計測システムを開発した。
先端技術応用研究所
先端技術ソリューショングループ
棚橋 尚貴・藤本 貴之
1
鋳鉄溶湯
背景と目的
ヒューム
ヒューム
金属部品等を製造する鋳造工場では、不良品の発生を防
ぐため、高熱で金属を溶解して合金を添加する工程(第
1 図 (a))や、金属を鋳型に流し入れる注湯工程(第 1 図
(b))など複数の工程で、溶湯温度の適切な管理が必要と
スラグ
スプラッシュ
(a) 溶湯表面 (b) 溶湯上部 (C)注湯
第 2 図 放射測温における異常値検出時の事象例
なる。
この溶湯温度を一般的な放射温度計で計測する場合、第
2 図(a)のように溶湯表面に形成されるスラグ(金属や
不純物などで構成される金属酸化物の膜)や、第 2 図(b)
(c) に示されるヒューム(湯煙、ダスト)やスプラッシュ
( 飛沫 ) が計測画面内に含まれると、実際の温度とかけ離れ
2
システムの概要
(1) システム構成と計測仕様
システムの構成と計測仕様を第 3 図、第 1 表に示す。カ
た異常値が出てしまうことがあり、一般的には、接触式の
メラを所定の位置に固定し、常時監視とすることで、計測
ため、外乱の影響を受けにくい熱電対を用いた手作業での
対象の高温被加熱物を検出したタイミングで、無人かつ自
温度計測が行われている。高熱環境の手作業で危険を伴う
動での温度計測が可能である。また、オプションの中継器
ことや、計測に時間を要するため全ての鋳物の注湯温度が
を用いて鋳造機制御盤内の PLC と PC を接続することによ
計測できない等の課題があり、温度計測の自動化や無人化
り、操業 PLC との通信連携も可能である。例えば注湯工程
が求められていた。
において、計測開始に対応する信号を PLC から受信後、計
そこで、金属溶湯など高熱の被加熱物を高精度かつ自動
測・解析した温度データを瞬時に PLC に自動送信する。
計測が可能な放射温度計測システムを開発した。
この機能により、各鋳型への出湯時にリアルタイムに温度
なお、本開発システムの鋳造工場における適用評価は、
を確認することができるほか、全ての鋳物製品に対して注
中央可鍛工業株式会社様のご協力を得て、実施した。
湯温度を紐づけることができるため、品質管理等に活用で
きる。
熱電対
取鍋
鋳鉄溶湯
熱電対
取鍋
鋳鉄溶湯
鋳型
(a) 合金添加工程 (b) 注湯工程
第 1 図 鋳造工場における鋳鉄溶湯の温度計測状況
23
技術開発ニュース 2025.03/No.169
オプション
放射測温システム
温度解析
ツール
既設
PLC
中継器
PC
第 3 図 システム構成
カメラ
�
- ▲TOP
- ページ: 24
-
研 究 成 果
第 1 表 計測仕様
項目
センサー
CMOS(Si)
測定温度範囲
測定精度
カメラ外形寸法
カメラ質量
保護構造
カメラ消費電力
インターフェース
デジタル出力
29×29×92 ~ 116mm( レンズによる )
150 ~ 170g ( レンズによる )
きるが、熱電対では困難なため、取鍋 1 杯に対して、開始
時、中盤、終了時の 3 点の計測結果で比較した。
カメラ
熱電対
取鍋出湯口 鋳鉄溶湯
3W
USB3.0
計測位置
Gigabit Ethernet
1m, 3m, 5m, 10m
計測
位置
鋳鉄
溶湯
USB バスパワー 12-24 VDC
ピークホールド / 瞬時値他
ケーブル長さ
短く、開発システムでは鋳型全数の注湯温度を計測可能で
0 ~ 50℃
( オプション ) IP67 対応
カメラ電源
対応 OS
600 ~ 1600℃
±0.7%(>1000℃ ),±1.5%(<1000℃ )
使用環境温度
信号処理
仕様
の精度を検証した。なお、注湯間隔が 10 秒未満と非常に
取鍋出湯口
(a) 開発システム (b) 熱電対
第 5 図 鋳鉄溶湯温度計測の比較検証状況
Windows10,11
(2) 特長
(2) 検証結果
① 熱電対に対するメリット
回繰り返し、熱電対計測との温度差および誤差率をまとめ
開発システムは以下の特長を有している。
開発システムおよび熱電対での計測値の比較検証を複数
非接触の計測であり、安全
た結果を第 6 図に示す。
自動計測で、無人化にも対応可能
熱電対計測値との温度差が平均で約 6℃、誤差率として
計測時間が短く、短時間での繰り返し計測が可能
は 0.4% であり、高精度に測温できることを確認した。開
② 汎用的な放射温度計に対するメリット
始時の差異がやや大きいが、これは開発システムと熱電対
(スラグ等)異種材料の混在下で高精度に測温
の計測位置が、前者は取鍋出湯口通過後、後者は取鍋出湯
ライン計測 ( 第 4 図 ) や計測タイミングの設定・調整
口内であり、異なることに起因する。すなわち、各取鍋の
により、計測ムラを抑制
出湯開始時は出湯口の耐火物温度が低く、抜熱により出湯
操業 PLC との連携で各ロットの温度管理が可能
口通過後に温度低下したことが差異に繋がっている。従っ
ガラス窓越しの計測も可能
て、鋳物の品質影響の確認では、取鍋出湯口内で計測する
熱電対よりも、受湯する鋳型側に近い位置で計測できる開
発システムの方が適切と考えられる。
最大温度差
最小温度差
平均温度差
50
0.8%
40
0.6%
30
0.4%
20
0.2%
7℃
6℃
5℃
0.0%
0
開始時
3
第 1 図(b)に示す注湯工程では、取鍋が傾動して鋳型
中盤
終了時
第 6 図 検証結果の一例
システムの検証
(1) 検証設備と検証方法
10
熱電対測温との温度差 ℃
第 4 図 ライン計測(注湯位置の変動に対応)
平均誤差率(絶対値) %
平均誤差率
1.0%
4
今後の展開
への注湯が終わると、自動的に次の鋳型が取鍋の前に搬送
開発システムは、中部電力ミライズ株式会社にて 2024
され、この鋳型に注湯される。これを繰り返し、取鍋内の
年 10 月より「MiEL Thermo HT」の商品名で販売してい
鋳鉄溶湯がなくなると、新たな取鍋が所定位置に送られ、
る。今後、鋳造工場や、各種加熱設備を保有する工場のお
注湯作業が継続される。
客さまへの開発品の普及、展開により、品質管理ならびに
そこで、第 5 図 (a) に示す通り、溶けた鋳鉄が撮影でき
省エネルギー推進に貢献していきたい。
ミエル
サーモ
エイチティー
る位置にカメラを設置し、第 5 図 (b) に示す熱電対計測と
同じタイミングの温度計測結果を比較して、開発システム
技術開発ニュース 2025.03/No.169
24
�
- ▲TOP

- ページ: 25
-
研 究 成 果
Results of Research Activities
脱炭素対応水素バーナー式工業炉の開発
Development of decarbonized hydrogen burner type industrial furnace
水素バーナーによる高効率加熱で工場の脱炭素化に貢献
執筆者
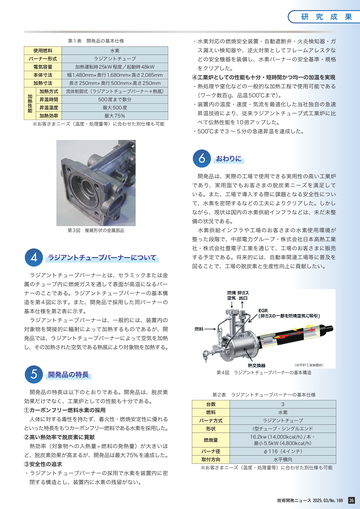
工場のお客さまの脱炭素のニーズにお応えするために、カーボンフリー燃料である水素
燃焼を熱源とした工業炉の開発に挑戦した。これにより、自動車関連工場等の大きな脱炭
素と生産性向上が可能となる。
先端技術応用研究所
先端技術ソリューショングループ
長 伸朗
1
開発の背景と目的
び合成メタンなどといった選択肢があるが、用途や時期、
政策動向等によって、それらの熱源を選択する必要がある。
その中で水素燃料は、重油やガスといった既存燃料に比
脱炭素社会の実現に向けて、産業分野でも燃焼時に CO2
べ、以下の特長がある。
を排出しない水素燃料が期待されている。水素燃料はカー
・燃焼時に CO2 を発生しない。
ボンフリー燃料として優れているが、逆火や爆発といった
・人体に対する毒性を持たない。
課題があり、使用する装置には安全に十分配慮する必要が
・着火性・燃焼安定性に優れる。
ある。
そこで、水素燃料を使用した、工場の一般的な加熱工程
で使用できる安全な工業炉を、株式会社日本高熱工業社お
よび株式会社豊電子工業と共同で開発した。
3
開発品の仕様
具体的には、工場のお客さまの脱炭素のニーズにお応え
開発品の外観および内部を、第 1 図と第 2 図に示す。ま
するため、カーボンフリー燃料である水素燃焼を熱源とし
た、開発品の基本仕様を第 1 表に示す。
た工業炉の開発に挑戦した。工場で実際にお使いいただけ
開発品内部には、第 2 図に示すように、循環ファン、水
るように、十分な安全性と加熱性能の確保を心がけた。
素ラジアントチューブバーナーおよび熱風吹出用のダクト
を設置した。水素ラジアントチューブバーナーで加熱さ
2
水素燃料の特徴
産業用の脱炭素熱源には、電気、水素、アンモニアおよ
れた数百℃の熱風が、装置下部に設置された対象物(第 3
図・自動車部品など)に吹き付けられ、対象物が加熱され
る。熱風は装置外部に排気されることなく、ファンによっ
て循環するようになっている。これにより、装置外部に無
駄に熱を捨てないため、熱効率を高めることができた。
開発品内の構造は、平成 30 年度省エネ大賞経済産業大
臣賞、平成 29 年度トヨタ自動車技術開発賞を受賞した、
温度・流量・流動を制御する「流体制御式」を応用して
いる。
第 1 図 開発品の外観
25
技術開発ニュース 2025.03/No.169
第2図 開発品の内部
�
- ▲TOP
- ページ: 26
- 第 1 表 開発品の基本仕様
・水素対応の燃焼安全装置・自動遮断弁・火炎検知器・ガ
使用燃料
水素
ス漏えい検知器や、逆火対策としてフレームアレスタな
ラジアントチューブ
電気容量
加熱運転時 25kW 程度/起動時 48kW
どの安全機器を装備し、水素バーナーの安全基準・規格
バーナー形式
本体寸法
加熱寸法
加熱性能
研 究 成 果
幅1,480mm×奥行1,680mm×高さ2,085mm
長さ 250mm× 奥行 500mm× 高さ 250mm
加熱方式
流体制御式(ラジアントチューブバーナー+熱風)
昇温時間
500 度まで数分
昇温温度
最大 500 度
加熱効率
最大 75%
※お客さまニーズ(温度・処理量等)に合わせた別仕様も可能
をクリアした。
④工業炉としての性能も十分・短時間かつ均一の加温を実現
・熱処理や窒化などの一般的な加熱工程で使用可能である
(ワーク数百 g、品温 500℃まで)。
・装置内の温度・速度・気流を最適化した当社独自の急速
昇温技術により、従来ラジアントチューブ式工業炉に比
べて伝熱性能を 10 倍アップした。
・500℃まで 3 ~ 5 分の急速昇温を達成した。
6
おわりに
開発品は、実際の工場で使用できる実用性の高い工業炉
であり、実用面でもお客さまの脱炭素ニーズを満足して
いる。また、工場で導入する際に課題となる安全性につい
て、水素を密閉するなどの工夫によりクリアした。しかし
ながら、現状は国内の水素供給インフラなどは、未だ未整
備の状況である。
第 3図 複雑形状の金属部品
水素供給インフラや工場のお客さまの水素使用環境が
整った段階で、中部電力グループ・株式会社日本高熱工業
4
ラジアントチューブバーナーについて
社・株式会社豊電子工業を通じて、工場のお客さまに販売
する予定である。将来的には、自動車関連工場等に普及を
図ることで、工場の脱炭素と生産性向上に貢献したい。
ラジアントチューブバーナーとは、セラミックまたは金
属のチューブ内に燃焼ガスを通して表面が高温になるバー
ナーのことである。ラジアントチューブバーナーの基本構
造を第 4 図に示す。また、開発品で採用した同バーナーの
基本仕様を第 2 表に示す。
ラジアントチューブバーナーは、一般的には、装置内の
対象物を間接的に輻射によって加熱するものであるが、開
発品では、ラジアントチューブバーナーによって空気を加熱
し、その加熱された空気である熱風により対象物を加熱する。
5
開発品の特長
開発品の特長は以下のとおりである。開発品は、脱炭素
効果だけでなく、工業炉としての性能も十分である。
①カーボンフリー燃料水素の採用
人体に対する毒性を持たず、着火性・燃焼安定性に優れる
といった特長をもつカーボンフリー燃料である水素を採用した。
②高い熱効率で脱炭素に貢献
熱効率(対象物への入熱量 ÷ 燃料の発熱量)が大きいほ
ど、脱炭素効果が高まるが、開発品は最大 75% を達成した。
③安全性の追求
・ラジアントチューブバーナーの採用で水素を装置内に密
第 4図 ラジアントチューブバーナーの基本構造
第 2 表 ラジアントチューブバーナーの基本仕様
台数
3
バーナ方式
ラジアントチューブ
燃料
水素
形状
I型チューブ・シングルエンド
燃焼量
16.2kw(14,000kcal/h)/ 本・
最小 5.5kW(4,800kcal/h)
バーナ径
φ 116(4 インチ)
取付方向
水平横向
※お客さまニーズ(温度・処理量等)に合わせた別仕様も可能
閉する構造とし、装置内に水素の残留がない。
技術開発ニュース 2025.03/No.169
26
�
- ▲TOP
- ページ: 27
-
研 究 成 果
Results of Research Activities
蒸気レス高効率空調機「WETCOMⅡ」の開発
Development of highly efficient steam-free air conditioner“WETCOM Ⅱ”
当社はアンデックス(株)、中部電力ミライズ(株)と共同で、主に塗装工程をもつお
客さま向けにヒートポンプを用いた高効率な調温調湿空調機「WETCOM Ⅱ」を開発し
た。塗装ブースに本空調機を導入することで、年間を通じて高効率な運転が実現でき、お
客さまが進める工場の脱炭素化に貢献できる。
1
執筆者
蒸気レスで省エネかつ安定した温度・湿度制御を実現
先端技術応用研究所
先端技術ソリューショングループ
中山 浩・薮崎 良介
中部電力ミライズ 法人営業部
ソリューションセンター
村上 尚哉
背景と目的
産業向けの塗装ブースやクリーンルームでは、塗装品質
の安定化や静電気を防止するために、内部の温湿度環境を
年間を通じて一定にする必要があり、これまでは湿度制御
性が高い蒸気加湿を使った調温調湿の空調機が導入されて
きた。
しかし、蒸気加湿を使用する空調機は、エネルギー使用
量が多く、脱炭素社会の実現に向けて、お客さまからは省
エネの要望が多く寄せられていた。
そこで、当社は、アンデックス(株)と中部電力ミライ
ズ(株)と共同で東洋熱工業(株)の技術協力のもと、
蒸気加湿ではなく冷温水ヒートポンプを活用し、従来の調
温調湿空調機に比較して、高い温湿度制御性だけでなく、
第 1 図 WETCOM Ⅱの外観
環境性・経済性・メンテナンス性に優れた調温調湿空調機
「WETCOM Ⅱ」を開発した。
2
開発機の概要
第 1 図に風量 80m3/min 仕様での「WETCOM Ⅱ」の外
観、第 2 図に機器内部の気流と水の流れ、第 3 図に空気線
図上の動きを示す。80m3/min 仕様のサイズは、幅 2.60m
× 奥行 1.20× 高さ 2.95m である。
第 2 図 機器内部の気流と水の流れ
本機器は、外気(第2.3図①)を水と直接接触させるこ
とにより、空気を相対 湿 度 100% の飽 和状 態(第2.3図
②)にし、その後再熱コイルにより、空気を加熱すること
で、給気を所定の温湿度に制御している。
(第2.3図③)
熱交換器で温度調節された水を機器内部の散水ノズルか
ら大量に噴霧することで、充填材部分にて、空気との間で
熱や湿度の交換をする。この結果、蒸気加湿と遜色ない高
い湿度を得ることができる。
熱交換器や再熱コイルに供給する冷温水の熱源にヒート
ポンプチラーを利用することにより、省エネのシステムと
なる。夏季の冷却除湿時は、熱交換器に冷水を供給し、冬
季の加温加湿時は、熱交換器に温水を供給することになる。
また、モジュールタイプの空調機となっており、散水セ
クションを連結させることで大風量にも対応している。省
スペースで配管工事が少なくメンテナンスも容易である。
27
技術開発ニュース 2025.03/No.169
第 3 図 空気線図での動き
�
- ▲TOP
- ページ: 28
-
研 究 成 果
3
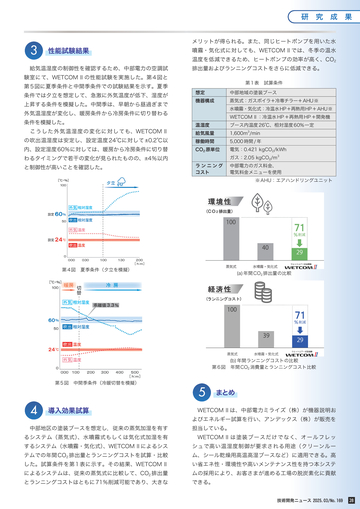
性能試験結果
給気温湿度の制御性を確認するため、中部電力の空調試
メリットが得られる。また、同じヒートポンプを用いた水
噴霧・気化式に対しても、WETCOM Ⅱでは、冬季の温水
温度を低減できるため、ヒートポンプの効率が高く、CO2
排出量およびランニングコストをさらに低減できる。
験室にて、WETCOM Ⅱの性能試験を実施した。第 4 図と
第 5 図に夏季条件と中間季条件での試験結果を示す。夏季
条件では夕立を想定して、急激に外気温度が低下、湿度が
上昇する条件を模擬した。中間季は、早朝から昼過ぎまで
第 1 表 試算条件
想定
中部地域の塗装ブース
機器構成
蒸気式:ガスボイラ+冷専チラー+AHU※
水噴霧・気化式:冷温水HP+再熱用HP+AHU※
外気温湿度が変化し、暖房条件から冷房条件に切り替わる
条件を模擬した。
こうした外気温湿度の変化に対しても、WETCOM Ⅱ
の吹出温湿度は安定し、設定温度 24℃に対して ±0.2℃以
内、設定湿度 60%に対しては、暖房から冷房条件に切り替
わるタイミングで若干の変化が見られたものの、±4%以内
と制御性が高いことを確認した。
WETCOM Ⅱ:冷温水 HP +再熱用 HP +開発機
温湿度
ブース内温度 26℃、相対湿度 60% 一定
給気風量
1,600m3/min
稼働時間
5,000 時間 / 年
CO2 原単位
電気:0.421 kgCO2/kWh
ガス:2.05 kgCO2/m3
ランニング
コスト
中部電力のガス料金、
電気料金メニューを使用
※ AHU:エアハンドリングユニット
第 4 図 夏季条件(夕立を模擬)
(a) 年間 CO2 排出量の比較
(b) 年間ランニングコストの比較
第 6 図 年間 CO2 消費量とランニングコスト比較
第 5 図 中間季条件(冷暖切替を模擬)
4
導入効果試算
5
まとめ
WETCOM Ⅱは、中部電力ミライズ(株)が機器説明お
よびエネルギー試算を行い、アンデックス(株)が販売を
中部地区の塗装ブースを想定し,従来の蒸気加湿を有す
担当している。
るシステム(蒸気式)、水噴霧式もしくは気化式加湿を有
WETCOM Ⅱは塗装ブースだけでなく、オールフレッ
するシステム(水噴霧・気化式)、WETCOM Ⅱによるシス
シュで高い温湿度制御が要求される用途(クリーンルー
テムでの年間 CO2 排出量とランニングコストを試算・比較
ム、シール乾燥用高温高湿ブースなど)に適用できる。高
した。試算条件を第 1 表に示す。その結果、WETCOM Ⅱ
い省エネ性・環境性や高いメンテナンス性を持つ本システ
によるシステムは、従来の蒸気式に比較して、CO2 排出量
ムの採用により、お客さまが進める工場の脱炭素化に貢献
とランニングコストはともに 71%削減可能であり、大きな
できる。
技術開発ニュース 2025.03/No.169
28
�
- ▲TOP
- ページ: 29
-
研 究 成 果
Results of Research Activities
新たな焼結方法と条件最適化による電池材料創製と性能向上の検証
Development for Solid state battery with the New Sintering method and Optimization Calculation of Conditions
執筆者
先端技術応用研究所
プロジェクト推進グループ
竹内 章浩
情報技術グループ
追良瀬 利也
EaaS グループ
久保田 潮
酸化物系全固体電池は材料特性として安全性が高いが、焼結しにくく電池性能を高めに
くいという課題がある。新たな焼結方法としてプラズマ活性化焼結法を用いて高性能化を
図るとともに、従来の実験経験的な焼結条件とデジタル技術を用いた機械学習により最適
化をした焼結条件を比較し、評価と課題抽出を行った。
1
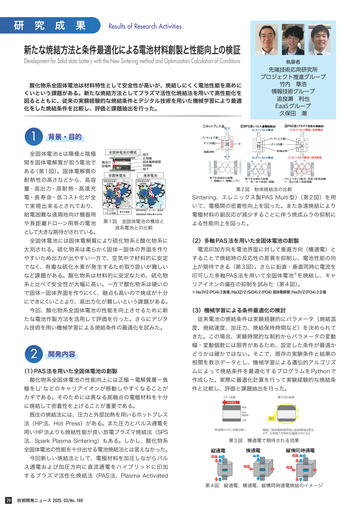
背景・目的
全固体電池とは陽極と陰極
間を固体電解質が担う電池で
ある(第1図)。固体電解質の
耐熱性の高さなどから、高容
量・高出力・高耐 熱・高速 充
第 2 図 粉体焼結法の比較
Sintering、エレニックス製 PAS Multi 型)(第 2 図)を用
電・長寿命・低コスト化が全
いて、電極間の密着性向上を図った。また急速焼結により
て実現出来るとされており、
給電困難な遠隔地向け機器用
や長距離ドローン用等の電池
として大きな期待がされている。
第 1 図 全固体電池の構成と
液系電池との比較
全固体電池には固体電解質により硫化物系と酸化物系に
大別される。硫化物系は柔らかく固体-固体の界面を作り
やすいため出力が出やすい一方で、空気中で材料的に安定
でなく、有毒な硫化水素が発生するため取り扱いが難しい
など課題がある。酸化物系は材料的に安定なため、硫化物
系と比べて安全性が大幅に高い。一方で酸化物系は硬いの
で固体-固体界面を作りにくく、融点も高いので焼成が十分
にできにくいことより、高出力化が難しいという課題がある。
今回、酸化物系全固体電池の性能を向上させるために新
たな電池作製方法を活用して評価を行った。さらにデジタ
ル技術を用い機械学習による焼結条件の最適化を試みた。
2
開発内容
(1)PAS 法を用いた全固体電池の創製
酸化物系全固体電池の性能向上には正極-電解質層-負
極を Li などのキャリアイオンが移動しやすくなることが
+
カギである。そのためには異なる高融点の電極材料を十分
に焼結して密着性を上げることが重要である。
既往の焼結法には、圧力と外部加熱を用いるホットプレス
法(HP 法、Hot Press)がある。また圧力とパルス通電を
用い HP 法よりも焼結性能が良い放電プラズマ焼結法(SPS
法、Spark Plasma Sintering)もある。しかし、酸化物系
電極材料の副反応が減少することに伴う焼成ムラの抑制に
よる性能向上を図った。
(2)多軸 PAS 法を用いた全固体電池の創製
電流印加方向を電池界面に対して垂直方向(横通電)と
することで焼結時の反応性の差異を抑制し、電池性能の向
上が期待できる(第 3 図)。さらに鉛直・垂直同時に電流を
印可した多軸 PAS 法を用いて全固体電池※を焼結し、キャ
リアイオンの偏在の抑制を試みた(第 4 図)。
※ Na3V2(PO4)3 負極 /Na3Zr2(SiO4)2(PO4) 固体電解質 /Na3V2(PO4)3 正極
(3)機械学習による条件最適化の検討
従来電池の焼結条件は実験経験的にパラメータ(焼結温
度、焼結速度、加圧力、焼結保持時間など)を決められて
きた。この場合、実験時間的な制約からパラメータの変動
幅・変動個数には限界があるため、設定した条件が最適か
どうかは確かではない。そこで、既存の実験条件と結果の
相関を教示データとし、機械学習による遺伝的アルゴリズ
ムによって焼結条件を最適化するプログラムを Python で
作成した。実際に最適化計算を行って実験経験的な焼結条
件と比較し、評価と課題抽出を行った。
電子流の遮蔽
イオン泳動
印加電流
負極
固体
電解質
正極
界面間のイオン泳動は無い
電子
電極/固体電解質界面に遮蔽領域は発生
せず、正負極で対称的な温度分布となる
第 3 図 横通電で期待される効果
全固体電池の性能を十分出せる電池焼結法とは言えなかった。
今回新しい焼結法として、電極材料を加圧しながらパル
ス通電および加圧方向に直流通電をハイブリッドに印加
するプラズマ活性化焼結法(PAS 法、Plasma Activated
第 4 図 縦通電、横通電、縦横同時通電焼結のイメージ
29
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 30
-
研 究 成 果
3
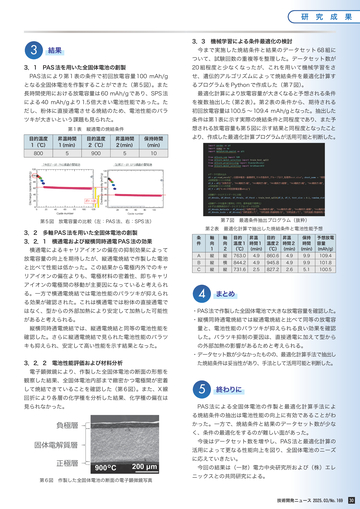
3.3 機械学習による条件最適化の検討
結果
今まで実施した焼結条件と結果のデータセット 68 組に
ついて、試験回数の重複等を整理した。データセット数が
3.1 PAS 法を用いた全固体電池の創製
PAS 法により第 1 表の条件で初回放電容量 100 mAh/g
となる全固体電池を作製することができた(第 5 図)。また
長時間使用における放電容量は 60 mAh/g であり、SPS 法
による 40 mAh/g より 1.5 倍大きい電池性能であった。た
だし、粉体に直接通電させる焼結のため、電池性能のバラ
ツキが大きいという課題も見られた。
20 組程度と少なくなったが、これを用いて機械学習をさ
せ、遺伝的アルゴリズムによって焼結条件を最適化計算す
るプログラムを Python で作成した(第 7 図)。
最適化計算により放電容量が大きくなると予想される条件
を複数抽出した(第 2 表)。第 2 表の条件から、期待される
初回放電容量は100.5 ~ 109.4 mAh/gとなった。抽出した
条件は第1表に示す実際の焼結条件と同程度であり、また予
想される放電容量も第 5 図に示す結果と同程度となったこと
第 1 表 縦通電の焼結条件
目的温度
1(℃)
昇温時間
1(min)
目的温度
2(℃)
昇温時間
2(min)
保持時間
(min)
800
5
900
5
10
より、作成した最適化計算プログラムが活用可能と判断した。
第 7 図 最適条件抽出プログラム(抜粋)
第 5 図 放電容量の比較(左:PAS 法、右:SPS 法)
3.2 多軸 PAS 法を用いた全固体電池の創製
3.2.1 横通電および縦横同時通電 PAS 法の効果
横通電によるキャリアイオンの偏在の抑制効果によって
放電容量の向上を期待したが、縦通電焼結で作製した電池
と比べて性能は低かった。この結果から電極内外でのキャ
リアイオンの偏在よりも、電極材料の密着性、即ちキャリ
アイオンの電極間の移動が主要因になっていると考えられ
る。一方で横通電焼結では電池性能のバラツキが抑えられ
る効果が確認された。これは横通電では粉体の直接通電で
第 2 表 最適化計算で抽出した焼結条件と電池性能予想
条
件
A
B
C
4
軸
向
1
軸
向
2
目的
昇温
目的
昇温
温度 1 時間 1 温度 2 時間 2
(℃) (min) (℃) (min)
縦
横
844.2
縦
縦
縦
縦
763.0
731.6
4.9
4.9
2.5
860.6
945.8
827.2
4.9
4.9
2.6
保持 予想放電
時間 容量
(min) (mAh/g)
9.9
109.4
5.1
100.5
9.9
101.8
まとめ
はなく、型からの外部加熱により安定して加熱した可能性
・PAS法で作製した全固体電池で大きな放電容量を確認した。
縦横同時通電焼結では、縦通電焼結と同等の電池性能を
量と、電池性能のバラツキが抑えられる良い効果を確認
があると考えられる。
確認した。さらに縦通電焼結で見られた電池性能のバラツ
キも抑えられ、安定して高い性能を示す結果となった。
3.2.2 電池性能評価および材料分析
電子顕微鏡により、作製した全固体電池の断面の形態を
観察した結果、全固体電池内部まで緻密かつ電極間が密着
して焼結できていることを確認した(第 6 図)。また、X 線
回折により各層の化学種を分析した結果、化学種の偏在は
見られなかった。
した。バラツキ抑制の要因は、直接通電に加えて型から
の外部加熱の影響があるためと考えられる。
・データセット数が少なかったものの、最適化計算手法で抽出し
た焼結条件は妥当性があり、手法として活用可能と判断した。
5
終わりに
PAS 法による全固体電池の作製と最適化計算手法によ
る焼結条件の抽出は電池性能の向上に有効であることがわ
かった。一方で、焼結条件と結果のデータセット数が少な
負極層
く、条件の最適化をするのが難しい面があった。
今後はデータセット数を増やし、PAS 法と最適化計算の
固体電解質層
正極層
・縦横同時通電焼結では縦通電焼結と比べて同等の放電容
活用によって更なる性能向上を図り、全固体電池のニーズ
900°C
200 μm
第 6 図 作製した全固体電池の断面の電子顕微鏡写真
に応えていきたい。
今回の結果は(一財)電力中央研究所および(株)エレ
ニックスとの共同研究による。
技術開発ニュース 2025.03/No.169
30
�
- ▲TOP
- ページ: 31
-
研 究 成 果
Results of Research Activities
デジタルツインの検証のための
ミニチュア生産ラインの開発と活用
Development and use of miniature production lines for digital twin verification
執筆者
製造業のデジタル化の促進と成長を目指して
近年、世界の製造業主要先進国では、現実空間の工場を双子のようにサイバー空間上に
も再現し、遠隔監視やシミュレーションを可能とする環境、いわゆるデジタルツインの環
境を構築する工場が増えてきている。そこでデジタルツインの環境を効率的に構築する装
置を開発した。
1
課題と背景
3
先端技術応用研究所
プロジェクト推進グループ
遠藤 紀之・森田 健太郎
先端技術ソリューショングループ
薮崎 良介・藤本 貴之
情報技術グループ
志水 洋
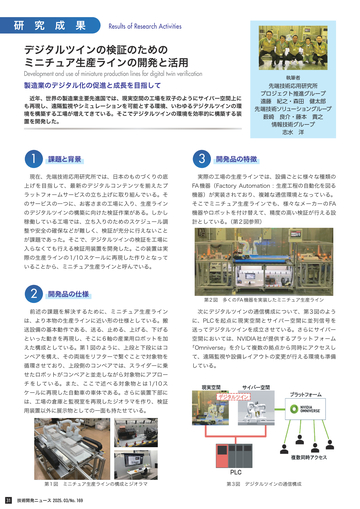
開発品の特徴
現在、先端技術応用研究所では、日本のものづくりの底
実際の工場の生産ラインでは、設備ごとに様々な種類の
上げを目指して、最新のデジタルコンテンツを揃えたプ
FA 機器(Factory Automation : 生産工程の自動化を図る
ラットフォームサービスの立ち上げに取り組んでいる。そ
機器)が実装されており、複雑な通信環境となっている。
のサービスの一つに、お客さまの工場に入り、生産ライン
そこでミニチュア生産ラインでも、様々なメーカーの FA
のデジタルツインの構築に向けた検証作業がある。しかし
機器やロボットを付け替えて、精度の高い検証が行える設
稼働している工場では、立ち入りのためのスケジュール調
計としている。(第 2 図参照)
整や安全の確保などが難しく、検証が充分に行えないこと
が課題であった。そこで、デジタルツインの検証を工場に
入らなくても行える検証用装置を開発した。この装置は実
際の生産ラインの 1/10 スケールに再現した作りとなって
いることから、ミニチュア生産ラインと呼んでいる。
2
開発品の仕様
第 2 図 多くの FA 機器を実装したミニチュア生産ライン
前述の課題を解決するために、ミニチュア生産ライン
次にデジタルツインの通信構成について、第 3 図のよう
は、より本物の生産ラインに近い形の仕様としている。搬
に、PLC を起点に現実空間とサイバー空間に並列信号を
送設備の基本動作である、送る、止める、上げる、下げる
送ってデジタルツインを成立させている。さらにサイバー
といった動きを再現し、そこに 6 軸の産業用ロボットを加
空間においては、NVIDIA 社が提供するプラットフォーム
えた構成としている。第 1 図のように、上段と下段にはコ
「Omniverse」を介して複数の拠点から同時にアクセスし
ンベアを構え、その両端をリフターで繋ぐことで対象物を
て、遠隔監視や設備レイアウトの変更が行える環境も準備
循環させており、上段側のコンベアでは、スライダーに乗
している。
せたロボットがコンベアと並走しながら対象物にアプロー
チをしている。また、ここで述べる対象物とは 1/10 ス
ケールに再現した自動車の車体である。さらに装置下部に
は、工場の倉庫と監視室を再現したジオラマを作り、検証
用装置以外に展示物としての一面も持たせている。
第 1 図 ミニチュア生産ラインの構成とジオラマ
31
技術開発ニュース 2025.03/No.169
第 3 図 デジタルツインの通信構成
�
- ▲TOP

- ページ: 32
-
研 究 成 果
4
開発品の安全性
その他の実績として、二か所の拠点で同日に開催され
た展示会、「Factory Innovation Week 2024 NAGOYA」
(第 6 図参照)と、「中部電力テクノフェア 2024」に同時
このミニチュア生産ラインは、機能面だけではなく、安
に出展した。一方の拠点に現物のミニチュア生産ライン
全面においても充分に配慮した設計をしている。
を置き、もう一方の拠点に、サイバー空間で再現したミニ
第 4 図のように、機械安全のガイドライン ISO/IEC ガイ
チュア生産ラインを置いた。二つの拠点の間でデータを
ド 51 に基づき、機械安全の国際規格 ISO12100 の基本安
相互に交信させて遠隔監視や遠隔操作を行う様子を展示
全規格に準拠して、設計段階からリスクアセスメントを行
した。当日は多くのお客さまからの反響をいただき、そ
い、その結果をもとに 1. 本質的安全設計、2. 安全防護お
の後株式会社 NTTPC コミュニケーションズ様が主催する
よび追加保護、3. 使用上の情報、以上の順序を踏んで保護
「NTTPC Forum 2025」への出展依頼を受け、更に広く活
方策を講じている。さらに個別の具体的な方策として、電
用することとなった。
気的な危険源に対しては IEC60204、制御システムの安全
関連部に対しては ISO13849、安全距離の確保に対しては
ISO13857、インターロックに対しては ISO14119、産業
用ロボットに対しては ISO10218 など他にも様々な安全の
国際規格にも準拠させた設計としている。
第 6 図 展示会へ出展の様子
第 4 図 機械安全に関する国際規格の体系図の一部
5
開発品の効果と実績
6
今後の展望と拡張性
既に一定の効果を挙げているミニチュア生産ラインで
ミニチュア生産ラインの効果は、これから実績を積んで
は あ る が、 今 後 は 無 人 搬 送 車 AGV(Automatic Guided
評価をしていく予定ではあるが、現時点でもある程度の試
Vehicle) や 自 立 走 行 搬 送 ロ ボ ッ ト AMR(Autonomous
算はできる。
Mobile Robot) なども連動させて検証の高度化を図ってい
これまでデジタルツインの環境構築のために約 3 か月
きたい。
にわたり、お客さまの工場に足を運んで検証を行ってき
また、この装置を開発したことで、別の活用方法も分
たが、その期間のうちの大半が、工場に入るためのスケ
かってきた。それは、当社研究所で開発される様々な技術
ジュールの調整であり、実際に検証が行えたのは数回程度
の実証実験に、このミニチュア生産ラインを活用すること
であった。それに対して、このミニチュア生産ラインで
である。
は、第 5 図のように、社内で集中的に検証が行えるため、
当社は製造業の生産ラインを持っていないため、産業向
その期間は 2 週間程度と大幅に削減できる見込みである。
けに開発した新しい技術の能力を確かめるための場所が無
く、これまでお客さまの工場をお借りして、限られた時間
で実証実験を行ってきた。それをこのミニチュア生産ライ
ンに実装させることで、社内で自由に実証実験が行えるよ
うになり、研究の高度化と検証期間の短縮に期待が持てる。
このように様々な用途と可能性を持つミニチュア生産ラ
インに、今後も更なる機能の拡張をさせていく。
第 5 図 デジタルツインの検証の様子
技術開発ニュース 2025.03/No.169
32
�
- ▲TOP
- ページ: 33
-
研 究 成 果
Results of Research Activities
RAG を用いたヒューマンエラー事象の対策立案
Estimating Preventive Measures for Human Error Events using RAG
ヒヤリハットの集合知を活用
我々は電力会社のヒューマンエラー事象を記録した「ヒヤリハット」の事例を知識源と
して、ヒューマンエラーに関する対策を立案する手法の検討を行っている。本稿では、大
規模言語モデル(LLM)と RAG の枠組みを用い、不完全な「外部知識」を LLM の「内
部知識」により補完する拡張方式を提案する。ヒヤリハットの数十万件の大規模事例を用
いた対策立案(マルチドキュメント要約)の評価実験では、提案する知識補完の有効性が
示唆される結果が得られた。
執筆者
先端技術応用研究所
情報技術グループ
瀬川 修
1
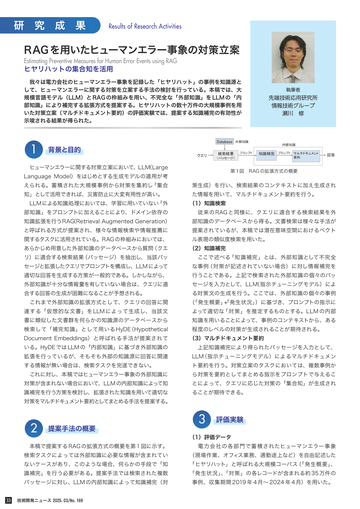
背景と目的
Database 外部知識
クエリ
検索結果
LLM による知識処理においては、学習に用いていない「外
部知識」をプロンプトに加えることにより、ドメイン依存の
知識補完
プロンプト
マルチドキュメント
要約
回答
第 1 図 RAG の拡張方式の概要
Language Model)をはじめとする生成モデルの適用が考
知」として活用できれば、災害防止に大変有用性が高い。
内部知識
(パッセージ)
ヒューマンエラーに関する対策立案において、LLM
(Large
えられる。蓄積された大規模事例から対策を集約し「集合
プロンプト
策生成)を行い、検索結果のコンテキストに加え生成され
た情報を用いて、マルチドキュメント要約を行う。
(1)知識検索
従来の RAG と同様に、クエリに適合する検索結果を外
知識拡張を行うRAG
(Retrieval Augmented Generation)
部知識のデータベースから得る。文書検索は様々な手法が
と呼ばれる方式が提案され、様々な情報検索や情報推薦に
提案されているが、本稿では潜在意味空間におけるベクト
関するタスクに活用されている。RAG の枠組みにおいては、
ル表現の類似度検索を用いた。
あらかじめ用意した外部知識のデータベースから質問(クエ
リ)に適合する検索結果(パッセージ)を抽出し、当該パッ
(2)知識補完
ここで述べる「知識補完」とは、外部知識として不完全
セージと拡張したクエリでプロンプトを構成し、LLM によって
な事例(対策が記述されていない場合)に対し情報補完を
適切な回答を生成する方策が一般的である。しかしながら、
行うことである。上記で検索された外部知識の個々のパッ
外部知識が十分な情報量を有していない場合は、クエリに適
セージを入力として、LLM
(指示チューニングモデル)によ
合する回答の生成が困難になることが予想される。
る対策文の生成を行う。ここでは、外部知識の個々の事例
これまで外部知識の拡張方式として、クエリの回答に関
(「発生概要」+
「 発生状況」)に基づき、プロンプトの指示に
連する「仮想的な文書」を LLM によって生成し、当該文
よって適切な「対策」を推定するものとする。LLM の内部
書に類似した文書群を何らかの知識源のデータベースから
知識を用いることによって、事例のコンテキストから、ある
検索して「補完知識」として用いる HyDE(Hypothetical
Document Embeddings)と呼ばれる手法が提案されて
いる。HyDE では LLM の「内部知識」に基づき外部知識の
程度のレベルの対策が生成されることが期待される。
(3)マルチドキュメント要約
上記知識補完により得られたパッセージを入力として、
拡張を行っているが、そもそも外部の知識源に回答に関連
LLM(指示チューニングモデル)によるマルチドキュメン
する情報が無い場合は、検索タスクを完遂できない。
ト要約を行う。対策立案のタスクにおいては、複数事例か
これに対し、本稿ではヒューマンエラー事象の外部知識に
ら対策を要約としてまとめる指示をプロンプトで与えるこ
対策が含まれない場合において、LLM の内部知識によって知
とによって、クエリに応じた対策の「集合知」が生成され
識補完を行う方策を検討し、拡張された知識を用いて適切な
ることが期待できる。
対策をマルチドキュメント要約としてまとめる手法を提案する。
2
提案手法の概要
本稿で提案する RAG の拡張方式の概要を第 1 図に示す。
33
3
評価実験
(1)評価データ
電 力会 社の各部門で蓄 積されたヒューマンエラー事 象
検索タスクによっては外部知識に必要な情報が含まれてい
(現場作業、オフィス業務、通勤途上など)を自由記述した
ないケースがあり、このような場合、何らかの手段で「知
「ヒヤリハット」と呼ばれる大規模コーパス(「発生概要」、
識補完」を行う必要がある。提案手法では検索された複数
「発生状況」、
「対策」の各レコードが含まれる約 35 万件の
パッセージに対し、LLM の内部知識によって知識補完(対
事例、収集期間 2019 年 4 月~ 2024 年 4 月)を用いた。
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 34
-
研 究 成 果
評価セットとして、対策が記述されている完全知識の
ント要約によって行い、評価指標は前記 (3) と同様に R1、
セット(「発生概要」、「発生状況」、「対策」)と、対策が記
R2、RL、BERT-Score を用いた。LLM に与えるプロンプ
述されていない不完全知識のセット(
「発生概要」、「発生
トは、前記 (3) の対策生成の文言に加え、「以下の複数事例
状況」)を用意した。評価セット作成においては、情報量
を簡潔に箇条書きで要約してください。要約結果のみを出
のコントロールのため、
「発生概要」+「発生状況」は両者で
力してください。」を用いた。評価結果を第 2 表に示す。ま
共通のレコードを用い、「対策」の有無のみの違いとする。
た、提案手法②による対策生成の結果例を第 3 表に示す。
(2)実験条件
今回の評価実験では、電力業務に関連した以下の 10 個
のクエリを用い、後述の各種評価で使用する。
配電の高所作業、配電の活線作業、配電設備巡視、
変電所巡視、送電線巡視、水力設備巡視、伐採作業、
現場での重量物運搬、熱中症、ドローン
知 識 検 索 に お い て は Embedding モ デ ル と し て、
Multilingual E5 を用いた。また、LLM として、Llama3.1
を日本語コーパスで継続学習した指示チューニングモデル
である Llama3.1-8B-EZO-1.1-it( パラメータ数約 80 億)
を用いた。
「対策」が無い不完全知識を補完する方法として、LLM
を用いた対策生成の評価を行った。実験では、前述の 10
個のクエリで検索された結果の上位 30 件の各事例の「発
生状況」と「発生概要」を LLM に入力し、「対策」を生成
する。そして、これらを人間系作成の対策と比較するこ
とによって、生成結果の妥当性を評価した。LLM に与え
るプロンプトとして「あなたは誠実で優秀なプロの編集
者です。以下の事象から対策を考えてください。
」を用い
た。評価指標としては正解(GT)とのキーワードの一致
率を評価する ROUGE-1(R1)、ROUGE-2(R2)、ROUGEL(RL)、および BERT による潜在意味空間における類似度を
評価する BERT-Score を用いた。生成された 300 件の「対
策」の評価結果を第 1 表に示す。生成結果を目視確認した
ところ、概ね妥当な対策が生成されていることを確認した。
第 1 表 LLM による対策生成の評価
0.179
R2
0.026
要約の元になる
情報源
BERT-Score
R1
R2
RL
①「発生概要」+
「発生状況」+
「対策」
0.294
0.065
0.162
0.708
②「発生概要」+
「発生状況」+
「対策(生成)」
0.328
0.067
0.170
0.703
③「対策(生成)」
のみ
0.275
0.055
0.150
0.707
④「発生概要」+
「発生状況」
0.178
0.029
0.113
0.648
第 3 表 提案手法②による対策生成例 : クエリ「熱中症」
(3)LLM による対策生成の評価
R1
第 2 表 知識補完の有効性評価
RL
0.138
BERT-Score
0.649
(4)知識補完の有効性評価
提案手法の有効性を確認するため、完全知識の場合と不
完全知識の場合における知識補完の有無による条件下でマ
ルチドキュメント要約の比較評価を行った。実験では完全
1. 作業時間調整 : 熱中症リスクが高まる時間帯 ( 午前 10 時から午
後 3 時頃 ) に、作業時間を調整して水分補給と休憩を促進する。
2. 予防体制の強化 : 熱中症のリスクが高まる期間に、特に労働者
が多い部門や作業場所で早期に対策を講じる。3. 気温と湿度の監
視 : 気温が高くなると、水分摂取不足により熱中症が発症するた
め、温度と湿度を監視し、適切な水分補給を促す。4. 定期的な水
分・塩分補給 : 作業員に定期的に水分と塩分を補給させ、実践を
確認する。5. 気象情報のチェック : 休暇前や出向前、現場の気象
予報を確認し、日中の高温となる可能性がある場合に十分な対策
を講じる。
(5)考察
第 2 表の ROUGE スコアに着目すると、
「生成した対策」を
加えた②のケースでは、完全知識の①を上回る結果が得られ
た。これは LLM で知識補完した情報が、人間系作成の対策
に匹敵する情報量を含んでいると考えられ、提案手法の有効
性が確認できた。また、②と④のケースの比較では、不完全
知識(「発生概要」と「発生状況」)の集合から一足飛びに対
策の要約を生成するよりも、一旦それぞれの「対策」を生成
して情報源として用いた方が、良好な結果が得られることが
分かった。これは段階的に推論を行うことによって、ある種
の Chain-of-Thought のような効果が表れていると考えられ
る。また、生成した対策のみを用いる③ケースは、①と②の
結果に及ばず、要約生成において、
「発生概要」と「発生状
況」のコンテキストが重要であることを示唆している。
知識を使うケース①と、知識補完を行う 3 つのケース②~
④を比較する。
①「発生概要」+「発生状況」+「対策」
②「発生概要」+「発生状況」+「対策(生成)」
③「対策(生成)」のみ
④「発生概要」+「発生状況」のみ
評価における GT は、前述の 10 個のクエリごとにサンプ
リングした複数事例 30 件について、人間系で対策をまと
めた要約結果を用いた。生成結果の評価はマルチドキュメ
4
まとめ
本稿では、RAG を用いたヒューマンエラー事象の対策立
案の一手法として、外部知識の補完によって拡張された知
識源を用い、複数事例の対策を集合知としてまとめる手法
を提案した。
(本研究は㈱中電シーティーアイとの共同研究として実施した)
技術開発ニュース 2025.03/No.169
34
�
- ▲TOP
- ページ: 35
-
研 究 成 果
Results of Research Activities
画像 AIによるコンプレッサ設備の運用最適への適用
Application of Image Classification AI to Optimal Operation of Compressors
膨大な設備稼働情報の時系列データに基づく運用良否判定の自動化を目指して
工場のコンプレッサ設備を効率よく運用するための設定チューニングには膨大な時系列
データ分析が求められる。本研究では画像 AI を用いて膨大なデータから稼働状態の判別
を行うとともに、正規表現を活用して設備全体での運用の良否を自動で判定する手法を見
出した。
執筆者
先端技術応用研究所
情報技術グループ
中村 剛
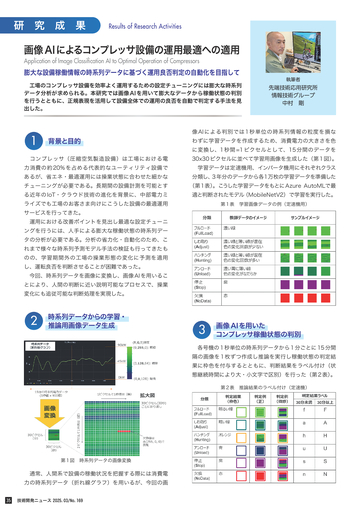
1
背景と目的
像 AI による判別では 1 秒単位の時系列情報の粒度を損な
わずに学習データを作成するため、消費電力の大きさを色
に変換し、1 秒間 =1 ピクセルとして、15 分間のデータを
コンプレッサ(圧縮空気製造設備)は工場における電
30x30 ピクセルに並べて学習用画像を生成した(第 1 図)。
力消費の約 20% を占める代表的なユーティリティ設備で
学習データは定速機用、インバータ機用にそれぞれクラス
あるが、省エネ・最適運用には操業状態に合わせた細かな
分類し、3 年分のデータから各1万枚の学習データを準備した
チューニングが必要である。長期間の設備計測を可能とす
(第1表)。こうした学習データをもとに Azure AutoMLで最
る近年の IoT・クラウド技術の進化を背景に、中部電力ミ
適と判断されたモデル(MobileNetV2)で学習を実行した。
ライズでも工場のお客さま向けにこうした設備の最適運用
第 1 表 学習画像データの例(定速機用)
サービスを行ってきた。
運用における改善ポイントを見出し最適な設定チューニ
ングを行うには、人手による膨大な稼働状態の時系列デー
タの分析が必要である。分析の省力化・自動化のため、こ
れまで様々な時系列予測モデル手法の検証も行ってきたも
のの、学習期間外の工場の操業形態の変化に予測を適用
し、運転良否を判断させることが困難であった。
今回、時系列データを画像に変換し、画像 AI を用いるこ
とにより、人間の判断に近い説明可能なプロセスで、操業
変化にも追従可能な判断処理を実現した。
2
時系列データからの学習・
推論用画像データ生成
3
画像 AIを用いた
コンプレッサ稼働状態の判別
各号機の 1 秒単位の時系列データから 1 分ごとに 15 分間
隔の画像を 1 枚ずつ作成し推論を実行し稼働状態の判定結
果に枠色を付与するとともに、判断結果をラベル付け(状
態継続時間により大・小文字で区別)を行った(第 2 表)。
第 2 表 推論結果のラベル付け(定速機)
第 1 図 時系列データの画像変換
通常、人間系で設備の稼働状況を把握する際には消費電
力の時系列データ(折れ線グラフ)を用いるが、今回の画
35
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 36
-
研 究 成 果
第 2 図 稼働状態推論の例
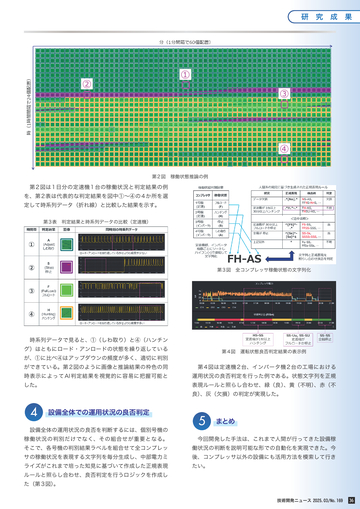
第 2 図は 1 日分の定速機 1 台の稼働状況と判定結果の例
を、第 2 表は代表的な判定結果を図中①~④の 4 か所を選
定して時系列データ(折れ線)と比較した結果を示す。
第 3 表 判定結果と時系列データの比較(定速機)
第 3 図 全コンプレッサ稼働状態の文字列化
時系列データで見ると、①(しわ取り)と④(ハンチン
グ)はともにロード・アンロードの状態を繰り返している
第 4 図 運転状態良否判定結果の表示例
が、①に比べ④はアップダウンの頻度が多く、適切に判別
ができている。第 2 図のように画像と推論結果の枠色の同
第 4 図は定速機 2 台、インバータ機 2 台の工場における
時表示によって AI 判定結果を視覚的に容易に把握可能と
運用状況の良否判定を行った例である。状態文字列を正規
した。
表現ルールと照らし合わせ、緑(良)、黄(不明)、赤(不
良)、灰(欠損)の判定が実現した。
4
設備全体での運用状況の良否判定
設備全体の運用状況の良否を判断するには、個別号機の
5
まとめ
稼働状況の判別だけでなく、その組合せが重要となる。
今回開発した手法は、これまで人間が行ってきた設備稼
そこで、各号機の判別結果ラベルを組合せて全コンプレッ
働状況の判断を説明可能な形での自動化を実現できた。今
サの稼働状況を表現する文字列を毎分生成し、中部電力ミ
後、コンプレッサ以外の設備にも活用方法を模索して行き
ライズがこれまで培った知見に基づいて作成した正規表現
たい。
ルールと照らし合わせ、良否判定を行うロジックを作成し
た(第 3 図)。
技術開発ニュース 2025.03/No.169
36
�
- ▲TOP
- ページ: 37
-
研 究 成 果
Results of Research Activities
生成 AIを用いた異常画像生成技術
Data Augmentation Method Using Generative AI
画像 AI 学習のための画像オーグメンテーション手法
様々な領域でディープラーニングを用いた機械学習や AI の実用化が進んでいる。AI モ
デルを学習するためには一定量のデータが必要となるが、学習データの希少性が原因で
十分な AI モデルの学習ができない事例は多い。本稿では、画像生成 AI と幾何学模様のマ
スク画像を組み合わせ、少ない画像から AI 学習用のデータを拡張する方法について紹介
する。
執筆者
先端技術応用研究所
情報技術グループ
追良瀬 利也
1
はじめに
ディープラーニングを用いた AI 技術の進化に伴い、さま
(1) 幾何学模様マスク画像の準備
オリジナル画像をマスキングするためのマスク画像を
用意する。図 1 では市松模様を例に示している。
(2) オリジナル画像の選択
ざまな産業で AI の活用が進んでいる。特にインフラや製造
拡張対象とするオリジナル画像、マスク画像を 1 枚選
業では、カメラ画像を入力として AI に画像内の異常を認識
択する。
させる試みが盛んである。しかし、AI モデルを学習させる
(3) 出力制限と画像生成
ためには一定量のデータが必要であり、長期間の劣化によ
(1)(2) の マ ス ク 画 像 と オ リ ジ ナ ル 画 像 の 組 合 せ
る異常を画像で判別する場合などでは、十分な学習データ
で、Inpaint と呼ばれる手法によりオリジナル画像にマ
を入手することが困難である。このようにデータが十分に
スキングを行う。この情報を画像生成モデルに入力し画
得られない場合、少ないデータで学習を行うためにデータ
像生成を行う。この際、生成画像が崩壊しないよう、
拡張と呼ばれる、データに加工を加えて水増しする方法が
ControlNet[1] と呼ばれる手法を用いて出力の制限を
よく用いられる。
行う。
データ拡張方法には、画像の回転や反転、明度の変更な
この手法のポイントは、同じオリジナル画像に対して
どがあるが、異常検出のようなタスクでは、現実世界の多
も、幾何学模様のマスクを変更することで、隠される部
様なパターンを網羅することが求められるため、これらの
分・隠されない部分が変化し、画像生成時の条件が容易に
方法だけでは十分な判別精度を達成することが難しい。そ
変更できることにある。これにより、1 枚のオリジナル画
こで近年発達の著しい画像生成 AI を用いて、AI の学習の
像から、その特徴を持たせたまま「別の異常画像」をいく
ための画像データを生成する手法を研究している。本稿で
つも生成することが可能となる。
は、その概要について紹介していく。
2
提案手法概要
3
評価実験
(1) 実験概要
手法の概要を図 1 に示す。当該手法は、ある画像をもと
提案手法を用いて画像を生成し、その結果が画像判別
に新たな画像を生成する、img2img と呼ばれる画像生成
モデルにどのような影響を及ぼすかを確認するため、実
手法と、幾何学模様によるマスクを核として構成されてい
験を行った。この実験では、Kaggle のトマトの葉の病
る。幾何学模様によりオリジナル画像をマスクし、マスク
変分類データセット [2] から、Septoria leaf spot(白星
されていない部分を考慮しながら、マスキングされた部分
病)および Early blight(輪紋病)クラスのデータを使用
を中心に画像を再構成(生成)することにより新たな画像
した。
を作成する。生成までの流れを以下に示す。
本研究で目的とするのはデータ数が限られた場合での
AI 精度向上であることから、元の訓練データセット(各
クラス 1000 枚)から、それぞれ 5, 10, 15, 20, 25 枚を
無作為抽出した実験用データセットを作成した。この実
験用データセットに対して、①そのままのデータでモデ
ルを訓練した場合②既存のデータ拡張手法により水増し
した上でモデルを訓練した場合③提案手法によりデータ
第 1 図 手法の概要図
37
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 38
- 研 究 成 果
拡張した上でモデルを訓練した場合とで比較を行った。
第 2 表 実験結果
学習対象のモデルは EfficientNetV2[3] と呼ばれるモデ
ルを用いており、画像生成時の主要な条件は表 1 に示す
通りである。また、②の比較対象のデータ拡張方法は図
2 の 4 種である。
第 1 表 画像生成時の主要条件
4
おわりに
本稿では、限られたデータ環境下での AI 活用を促進する
ための、画像生成 AI を用いた異常画像の生成技術について
第 2 図 比較対象のデータ拡張方法 4 種(左からオリジナル・
ぼかし・上下反転・コントラスト変化・鮮鋭化)
紹介した。実験結果から、データが限られている際の AI の
学習過程において、当該手法が AI の精度向上に寄与するこ
とが確認出来た。この技術は、これまでデータの不足が原
(2) 実験結果
実験結果を表 2 に示す。表の各数字は各条件で学習さ
因で AI の活用が進まなかった領域に対して、AI の開発・テ
ストのためのデータを提供し、AI 技術の活用の幅を広げら
せたモデルの検証データにおける正解率を示している。
れる可能性がある。
表から、無作為抽出された画像枚数が 5, 10, 15 毎の場
今後は実際の電力設備の画像における実験や、画像判別
合提案手法が最も精度が高いことがわかる。また 20, 25
以外の物体検出やセグメンテーションを行う他の AI モデル
枚においては上下左右反転が最も精度が高く、提案手法
にも広く適用出来るよう、手法の改良や、更に効果的な画
は 2 番目に良い精度を示している。いずれの場合も、提
像を生成するための手法開発を予定している。こうした活
案手法は拡張を何も加えない場合に比べて画像判別精度
動を通じ、社内の AI 適用する業務を増やしていき、社内の
が向上しており、特にクラスごとのデータ数が少ない場
DX 化に貢献していきたい。
合において、他のデータ拡張手法に比べ良い結果を示し
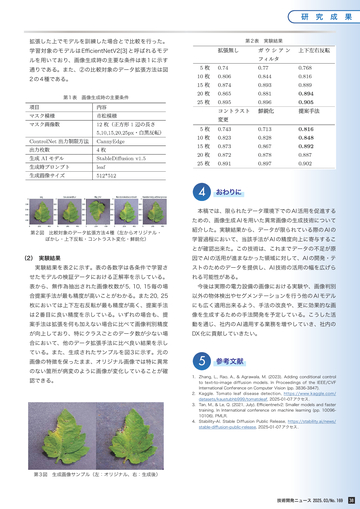
ている。また、生成されたサンプルを図 3 に示す。元の
画像の特徴を保ったまま、オリジナル画像では特に異常
のない箇所が病変のように画像が変化していることが確
認できる。
5
参考文献
1. Zhang, L., Rao, A., & Agrawala, M. (2023). Adding conditional control
to text-to-image diffusion models. In Proceedings of the IEEE/CVF
International Conference on Computer Vision (pp. 3836-3847).
2. Kaggle. Tomato leaf disease detection, https://www.kaggle.com/
datasets/kaustubhb999/tomatoleaf, 2025-01-07 アクセス .
3. Tan, M., & Le, Q. (2021, July). Efficientnetv2: Smaller models and faster
training. In International conference on machine learning (pp. 1009610106). PMLR.
4. Stability-AI. Stable Diffusion Public Release, https://stability.ai/news/
stable-diffusion-public-release, 2025-01-07 アクセス .
第 3 図 生成画像サンプル(左:オリジナル、右:生成後)
技術開発ニュース 2025.03/No.169
38
�
- ▲TOP
- ページ: 39
-
研 究 成 果
Results of Research Activities
人流データ等を利用した空調換気制御システムの開発
商業施設の既存の安全カメラを利用して、フロア人数を把握・予測することで適正な換
気量に制御する空調制御システムを試作し実証試験を行った。換気量を低減した結果、夏
期の店内の温度・湿度を低下させることができ、制御対象の空調制御システムの省エネに
加えて、冷蔵ショーケース室外機の消費電力削減にもつながった。本研究の分析について
は愛知工業大学との共同研究にて実施した。
先端技術応用研究所
EaaS グループ
藤田 美和子
先端技術ソリューショングループ
中山 浩
Development of air conditioning and ventilation control system using data on the flow of people, etc.
執筆者
1
背景と目的
室内機
換気給気口
O11
商業施設ではエネルギー費用の削減や地球環境保全のた
O21
O22
O23
O24
O12
めの省エネルギーが求められている。また、空調負荷に大
O13
きな影響を与える換気量については、コロナ禍において増
大したが、現在では省エネを図るために必要十分な換気量
O14
に抑制するニーズが高くなっている。換気量制御には、給
排気ファンの還気の CO2 センサによる制御が一般的である
1階
が、還気位置は店舗の隅に偏っていることが多く、必ずし
第 1 図 各階空調・換気設備平面図
も店舗の代表 CO2 濃度ではない。そこで、本研究では、店
舗内の安全カメラによって把握された人流データを利用・
予測し、必要換気量を計算して換気量制御を行った。ま
た、室内負荷を処理する個別分散空調については、天気予
報と連動させた省エネ運用を行った。
2
対象建物と設備概要
2.1 対象建物概要
2階
第 1 表 空調設備能力
記号
階数
2
O21,23,24
2
2
2
O22
2
2
型式
マルチエアコン
マルチエアコン
マルチエアコン
マルチエアコン
マルチエアコン
マルチエアコン
室外機
室内機
室外機
室内機
室内機
室内機
冷房能力 暖房能力
台数
100.0kW 112.0kW 1 台 ×3 系統
16.0kW
18.0kW 6 台 ×3 系統
122.0kW 140.0kW
1台
16.0kW
18.0kW
6台
14.0kW
16.0kW
1台
11.2kW
12.5kW
1台
第 2 表 外調機仕様
型式
空冷ヒートポンプ式
冷房能力
立形ルーフトップ外調機
94.5kW
暖房能力
加湿量
飯田」である。地上 2階建てであり、敷地面積は13,925㎡、
番号
日付
設定
延べ床面積は9,550㎡、売場面積は6,300㎡、建築面積は
①
②
③
④
⑤
⑥
⑦
2022/8/25
2022/9/21
2023/8/28
2023/9/4
2023/9/3
2023/9/20
2023/9/30
冷却 100%風量運転
冷却 100%風量運転 ( 昼 3h 停止 )
送風 100%風量運転
平常日 ( 平日 ) 制御
平常日 ( 休日 ) 制御
特売日 ( 平日 ) 制御
特売日 ( 休日 ) 制御
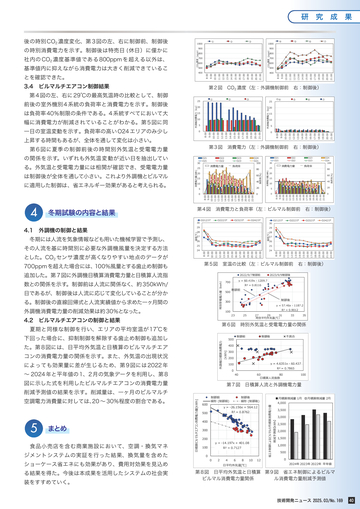
2.2 対象建物設備概要
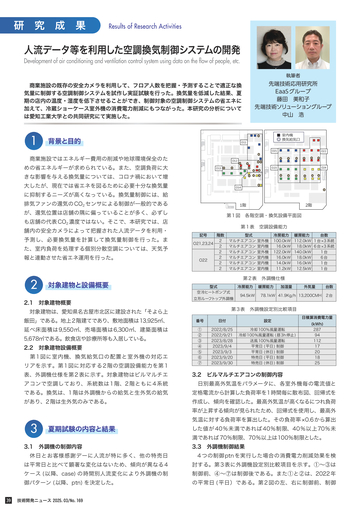
第 1 図に室内機、換気給気口の配置と室外機の対応エ
リアを示す。第 1 図に対応する 2 階の空調設備能力を第 1
表、外調機仕様を第 2 表に示す。対象建物はビルマルチエ
アコンで空調しており、系統数は 1 階、2 階ともに 4 系統
台数
2台
第 3 表 外調機設定別比較項目
対象建物は、愛知県名古屋市北区に建設された「そよら上
5,678㎡である。飲食店や診療所等も入居している。
外気量
78.1kW 41.9Kg/h 13,200CMH
日積算消費電力量
(kWh)
287
94
112
17
20
18
25
3.2 ビルマルチエアコンの制御内容
日別最高外気温をパラメータに、各室外機毎の電流値と
である。換気は、1 階は外調機からの給気と生外気の給気
定格電流から計算した負荷率を1時間毎に散布図、回帰式を
があり、2 階は生外気のみである。
作成し、傾向を確認した。最高外気温が高くなるにつれ負荷
率が上昇する傾向が見られたため、回帰式を使用し、最高外
3
夏期試験の内容と結果
3.1 外調機の制御内容
休日とお客様感謝デーに人流が特に多く、他の特売日
39
気温に対する負荷率を算出した。その負荷率 ×0.6 から算出
した値が 40%未満であれば 40%制限、40%以上70%未
満であれば 70%制限、70%以上は100%制限とした。
3.3 外調機制御結果
4 つの制御 ptn を実行した場合の消費電力削減効果を検
は平常日と比べて顕著な変化はないため、傾向が異なる 4
討する。第 3 表に外調機設定別比較項目を示す。①~③は
ケース ( 以降、case) の時間別人流変化により外調機の制
制御前、④~⑦は制御後である。また①と②は、2022 年
御パターン ( 以降、ptn) を決定した。
の平常日 ( 平日)である。第 2 図の左、右に制御前、制御
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 40
-
研 究 成 果
CO₂濃度(ppm)
21:00
20:00
19:00
18:00
17:00
16:00
15:00
14:00
13:00
12:00
11:00
9:00
8:00
10:00
21:00
19:00
18:00
20:00
21:00
20:00
19:00
18:00
17:00
16:00
15:00
14:00
13:00
12:00
11:00
9:00
10:00
8:00
外調機消費電力(kw)
21:00
20:00
80
60
15
40
10
22:00
21:00
20:00
19:00
18:00
17:00
16:00
15:00
14:00
13:00
12:00
9:00
11:00
10:00
0
8:00
0
8:00
9:00
10:00
11:00
12:00
13:00
14:00
15:00
16:00
17:00
18:00
19:00
20:00
21:00
22:00
20
0
負荷率(%)
負荷率(%)
負荷率
20
0
第 4 図 消費電力と負荷率(左:ビルマル制御前 右:制御後)
O21エリア
O22エリア
O23エリア
O24エリア
30
29
29
28
28
O21エリア
O22エリア
O23エリア
O24エリア
温度(℃)
27
27
26
22:00
21:00
20:00
19:00
18:00
17:00
16:00
15:00
14:00
13:00
12:00
11:00
9:00
10:00
22:00
21:00
20:00
18:00
19:00
17:00
15:00
16:00
12:00
24
14:00
25
24
8:00
26
25
第 5 図 室温の比較(左:ビルマル制御前 右:制御後)
2022/9/7制御前
時別受電電力量(kwh)
500
2023/9/9制御後
y = 60.419x - 1209.7
700
R² = 0.8116
制御前
制御後
300
100
4.2 ビルマルチエアコンの制御と結果
y = 57.46x - 1187.2
R² = 0.9012
23
25
27
29
31
時別平均外気温(℃)
33
35
第 6 図 時別外気温と受電電力量の関係
外調機日積算消費電力
下回った場合に、抑制制御を解除する歯止め制御も追加し
た。第 8 図には、日平均外気温と日積算のビルマルチエア
コンの消費電力量の関係を示す。また、外気温の出現状況
によっても効果量に差が生じるため、第 9 図には 2022 年
制御後
不具合
400
300
200
y = 4.6351x - 60.437
100
0
~ 2024 年と平年値の 1、2 月の気象データを利用し、第 8
図に示した式を利用したビルマルチエアコンの消費電力量
制御前
500
[kWh]
夏期と同様な制御を行い、エリアの平均室温が 17℃を
R² = 0.7865
40
60
80
日積算人流指数
100
第 7 図 日積算人流と外調機電力量
制御前
線形 (制御前)
制御後
線形 (制御後)
y = -26.156x + 564.12
R² = 0.8762
500
400
300
200
y = -14.197x + 401.08
100
0
R² = 0.7127
0
2
4
6
8
日平均外気温[℃]
10
12
月積算削減量 1月
月積算削減量 2月
4,000
3,500
3,000
削減予測値【kWh】
600
省エネ制御によるビルマルの月積算消費電力量
日積算ビルマルチエアコン消費電力量[kWh]
削減予測値の結果を示す。削減量は、一ヶ月のビルマルチ
装をすすめていく。
消費電力量
O24
O24
100
5
外調機消費電力量の削減効果は約 30%となった。
る結果を得た。今後は本成果を活用したシステムの社会実
O23
O23
20
る。制御後の直線回帰式と人流実績値から求めた一ヶ月間の
ショーケース省エネにも効果があり、費用対効果を見込め
O22
O22
5
日であるが、制御後は人流に応じて変化していることが分か
ジメントシステムの実証を行った結果、換気量を含めた
19:00
10
O21
O21
25
80
40
数との関係を示す。制御前は人流に関係なく、約 350kWh/
食品小売店を含む商業施設において、空調・換気マネ
30
60
追加した。第 7 図に外調機日積算消費電力量と日積算人流指
まとめ
18:00
負荷率
15
700ppm を超えた場合には、100%風量とする歯止め制御も
5
17:00
16:00
15:00
14:00
13:00
12:00
9:00
消費電力量
O24
O21
100
20
とした。CO2 センサ濃度が高くなりやすい地点のデータが
空調電力消費量に対しては、20 ~ 30%程度の割合である。
17:00
16:00
15:00
14:00
12:00
11:00
13:00
O23
O23
13:00
その人流を基に時間別に必要な外調機風量を決定する方法
O22
O22
温度(℃)
冬期には人流を気象情報なども用いた機械学習で予測し、
O21
O21
25
30
4.1 外調機の制御と結果
5
0
消費電力量(㎾h)
30
11:00
冬期試験の内容と結果
⑦
第 3 図 消費電力(左:外調機制御前 右:制御後)
9:00
4
⑥
10
5
消費電力量(㎾h)
に適用した制御は、省エネルギー効果があると考えられる。
⑤
15
10
0
④
25
15
8:00
は制御後が全体を通して小さい。これより外調機とビルマル
③
20
第 6 図に夏季の制御前後の時間別外気温と受電電力量
る。外気温と受電電力量には相関が確認でき、受電電力量
②
20
上昇する時間もあるが、全体を通して変化は小さい。
の関係を示す。いずれも外気温変動が近い日を抽出してい
11:00
①
25
8:00
一日の室温変動を示す。負荷率の高い O24 エリアのみ少し
400
第 2 図 CO2 濃度(左:外調機制御前 右:制御後)
外調機消費電力(kw)
幅に消費電力が削減されていることがわかる。第 5 図に同
10:00
8:00
500
第 4 図の左、右に 29℃の最高気温時の比較として、制御
は負荷率 40%制限の条件である。4 系統すべてにおいて大
⑦
600
500
3.4 ビルマルチエアコン制御結果
前後の室外機別 4 系統の負荷率と消費電力を示す。制御後
⑥
700
600
とを確認できた。
⑤
800
700
400
④
1000
800
9:00
基準値内に抑えながら消費電力は大きく削減できているこ
③
900
10:00
社内の CO2 濃度基準値である 800ppm を超える以外は、
②
900
10:00
の時別消費電力を示す。制御後は特売日 ( 休日)に僅かに
①
1000
CO₂濃度(ppm)
後の時別 CO2 濃度変化、第 3 図の左、右に制御前、制御後
2,500
2,000
1,500
1,000
500
0
2024年 2023年 2022年 平年値
第 8 図 日平均外気温と日積算 第 9 図 省エネ制御によるビルマ
ビルマル消費電力量関係
ル消費電力量削減予測値
技術開発ニュース 2025.03/No.169
40
�
- ▲TOP
- ページ: 41
-
研 究 成 果
Results of Research Activities
暮らしにおける快適性および省エネ技術の定量評価
Research on technologies supporting energy efficiency and comfort in daily living.
就寝時の採暖器具の使用による快適性と省エネ効果、
洗濯機の効果的な使用方法について
昨今の電気料金の高騰により、快適かつ省エネな暮らしへの関心が高まっており、中部
電力ミライズは家庭向け Web サービスにて、様々な暮らしの知恵を発信している。本研
究では「冬期の省エネで快適な就寝方法」と「洗濯機の効果的な使用方法」について、恒
温恒湿室での被験者試験および住宅用環境実験棟における、家電の消費エネルギー分析
を、摂南大学との共同研究により行った。
執筆者
先端技術応用研究所
EaaS グループ
久保田 潮
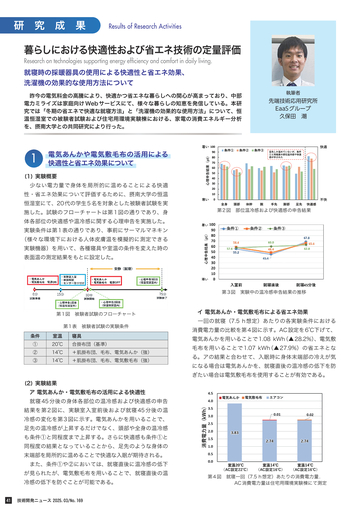
1
電気あんかや電気敷毛布の活用による
快適性と省エネ効果について
(1) 実験概要
少ない電力量で身体を局所的に温めることによる快適
性・省エネ効果について評価するために、摂南大学の恒温
恒湿室にて、20 代の学生 5 名を対象とした被験者試験を実
施した。試験のフローチャートは第 1 図の通りであり、身
第 2 図 部位温冷感および快適感の申告結果
体各部位の快適感や温冷感に関する心理申告を実施した。
実験条件は第 1 表の通りであり、事前にサーマルマネキン
(様々な環境下における人体皮膚温を模擬的に測定できる
実験機器)を用いて、各種寝具や室温の条件を変えた時の
表面温の測定結果をもとに設定した。
第 3 図 実験中の温冷感申告結果の推移
第 1 図 被験者試験のフローチャート
第 1 表 被験者試験の実験条件
条件
室温
寝具
①
20℃
合掛布団(基準)
②
14℃
+肌掛布団、毛布、電気あんか(強)
③
14℃
+肌掛布団、毛布、電気敷毛布(強)
(2) 実験結果
イ 電気あんか・電気敷毛布による省エネ効果
一回の就寝(7.5 h 想定)あたりの各実験条件における
消費電力量の比較を第 4 図に示す。AC 設定を 6℃下げて、
電気あんかを用いることで 1.08 kWh(▲ 28.2%)、電気敷
毛布を用いることで 1.07 kWh(▲ 27.9%)の省エネとな
る。アの結果と合わせて、入眠時に身体末端部の冷えが気
になる場合は電気あんかを、就寝直後の温冷感の低下を防
ぎたい場合は電気敷毛布を使用することが有効である。
ア 電気あんか・電気敷毛布の活用による快適性
就寝 45 分後の身体各部位の温冷感および快適感の申告
結果を第 2 図に、実験室入室前後および就寝 45 分後の温
冷感の変化を第 3 図に示す。電気あんかを用いることで、
足先の温冷感が上昇するだけでなく、頭部や全身の温冷感
も条件①と同程度まで上昇する。さらに快適感も条件①と
同程度の結果となっていることから、足先のような身体の
末端部を局所的に温めることで快適な入眠が期待される。
また、条件①や②においては、就寝直後に温冷感の低下
が見られたが、電気敷毛布を用いることで、就寝直後の温
冷感の低下を防ぐことが可能である。
41
技術開発ニュース 2025.03/No.169
第 4 図 就寝一回(7.5 h 想定)あたりの消費電力量 .
AC 消費電力量は住宅用環境実験棟にて測定
�
- ▲TOP
- ページ: 42
-
研 究 成 果
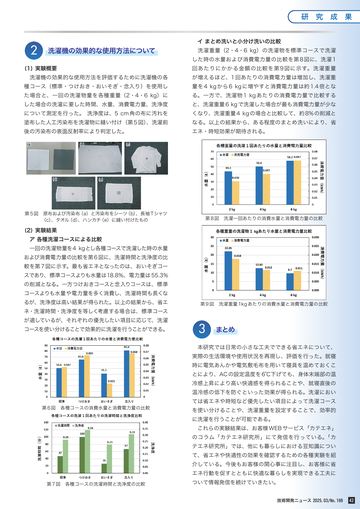
2
洗濯機の効果的な使用方法について
(1) 実験概要
イ まとめ洗いと小分け洗いの比較
洗濯重量(2・4・6 kg)の洗濯物を標準コースで洗濯
した時の水量および消費電力量の比較を第 8 図に、洗濯 1
回あたりにかかる金額の比較を第 9 図に示す。洗濯重量
洗濯機の効果的な使用方法を評価するために洗濯機の各
が増えるほど、1 回あたりの消費電力量は増加し、洗濯重
種コース(標準・つけおき・おいそぎ・念入り)を使用し
量を 4 kg から 6 kg に増やすと消費電力量は約 1.4 倍とな
た場合と、一回の洗濯物量を各種重量(2・4・6 kg)に
る。一方で、洗濯物 1 kg あたりの消費電力量で比較する
した場合の洗濯に要した時間、水量、消費電力量、洗浄度
と、洗濯重量 6 kg で洗濯した場合が最も消費電力量が少な
について測定を行った。 洗浄度は、5 cm 角の布に汚れを
くなり、洗濯重量 4 kg の場合と比較して、約 8% の削減と
塗布した人工汚染布を洗濯物に縫い付け(第 5 図)、洗濯前
なる。以上の結果から、ある程度のまとめ洗いにより、省
後の汚染布の表面反射率により判定した。
エネ・時短効果が期待される。
第 5 図 原布および汚染布(a)と汚染布をシーツ(b)、長袖 Tシャツ
(c)、タオル(d)、ハンカチ(e)に縫い付けたもの
第 8 図 洗濯一回あたりの消費水量と消費電力量の比較
(2) 実験結果
ア 各種洗濯コースによる比較
一回の洗濯物量を4 kgとし各種コースで洗濯した時の水量
および消費電力量の比較を第 6 図に、洗濯時間と洗浄度の比
較を第 7 図に示す。最も省エネとなったのは、おいそぎコー
スであり、標準コースよりも水量は18.8%、電力量は 55.3%
の削減となる。一方つけおきコースと念入りコースは、標準
コースよりも水量や電力量を多く消費し、洗濯時間も長くな
るが、洗浄度は高い結果が得られた。以上の結果から、省エ
ネ・洗濯時間・洗浄度を等しく考慮する場合は、標準コース
が適しているが、それぞれの優先したい項目に応じて、洗濯
コースを使い分けることで効果的に洗濯を行うことができる。
第 9 図 洗濯重量 1kg あたりの消費水量と消費電力量の比較
3
まとめ
本研究では日常の小さな工夫でできる省エネについて、
実際の生活環境や使用状況を再現し、評価を行った。就寝
時に電気あんかや電気敷毛布を用いて寝具を温めておくこ
とにより、AC の設定温度を 6℃下げても、身体末端部の温
冷感上昇により高い快適感を得られることや、就寝直後の
温冷感の低下を防ぐといった効果が得られる。洗濯におい
第 6 図 各種コースの消費水量と消費電力量の比較
ては省エネや時短など優先したい項目によって洗濯コース
を使い分けることや、洗濯重量を設定することで、効率的
に洗濯を行うことが可能である。
これらの実験結果は、お客様 WEB サービス「カテエネ」
のコラム「カテエネ研究所」にて発信を行っている。「カ
テエネ研究所」では、他にも暮らしにおける豆知識につい
て、省エネや快適性の効果を確認するための各種実験を紹
介している。今後もお客様の関心事に注目し、お客様に省
エネ行動を促すとともに快適な暮らしを実現できる工夫に
第 7 図 各種コースの洗濯時間と洗浄度の比較
ついて情報発信を続けていきたい。
技術開発ニュース 2025.03/No.169
42
�
- ▲TOP
- ページ: 43
-
研 究 成 果
Results of Research Activities
浜岡1号機圧力容器の中性子照射脆化評価に基づく
4 号機の長期運転可能期間算定に関する応用研究
Applied Research on Long-term Operable Period of Hamaoka Unit-4 based on Radiation
Embrittlement Evaluation of Unit-1 Reactor Pressure Vessel.
クラッド直下熱影響部の中性子照射脆化の調査結果から言えること
執筆者
浜岡 1 号機の原子炉の内表面クラッド溶接部近傍を対象に照射脆化度を各種機械試験
(シャルピー衝撃試験など)で確認した結果、予想した通りの結果が得られた。今回、こ
の成果の応用編として、浜岡の各号機の中性子束の差を考えることで、浜岡 1 号機の試験
結果が他号機にも展開できることを新たに考察できたので報告する。
原子力安全技術研究所
プラントグループ
熊野 秀樹
1
はじめに
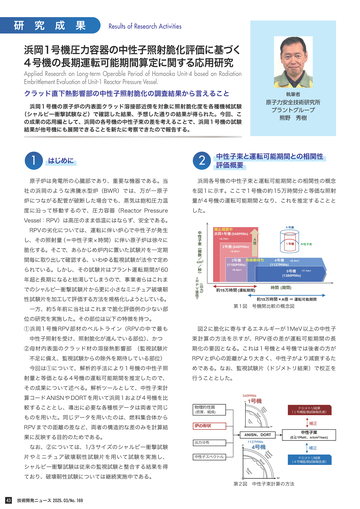
2
中性子束と運転可能期間との相関性
評価概要
原子炉は発電所の心臓部であり、重要な機器である。当
浜岡各号機の中性子束と運転可能期間との相関性の概念
社の浜岡のような沸騰水型炉(BWR)では、万が一原子
を図 1 に示す。ここで 1 号機の約 15 万時間分と等価な照射
炉につながる配管が破断した場合でも、蒸気は飽和圧力温
量が 4 号機の運転可能期間となり、これを推定することと
度に沿って移動するので、圧力容器(Reactor Pressure
した。
Vessel:RPV)は高圧のまま低温にはならず、安全である。
RPVの劣化については、運転に伴い炉心で中性子が発生
し、その照射量(=中性子束 ×時間)に伴い原子炉は徐々に
脆化する。そこで、あらかじめ炉内に置いた試験片を一定期
間毎に取り出して確認する、いわゆる監視試験が法令で定め
られている。しかし、その試験片はプラント運転期間が 60
年超と長期になると枯渇してしまうので、事業者らはこれま
でのシャルピー衝撃試験片から更に小さなミニチュア破壊靭
性試験片を加工して評価する方法を規格化しようとしている。
一方、約 5 年前に当社はこれまで脆化評価例の少ない部
第 1 図 号機間比較の概念図
位の研究を実施した。その部位は以下の特徴を持つ。
①浜岡 1 号機 RPV 部材のベルトライン(RPV の中で最も
図 2 に脆化に寄与するエネルギーが 1MeV 以上の中性子
中性子照射を受け、照射脆化が進んでいる部位)、かつ
束計算の方法を示すが、RPV 径の差が運転可能期間の長
②母材内表面のクラッド材の溶接熱影響部 (監視試験片
期化の要因となる。これは 1 号機と 4 号機では後者の方が
不足に備え、監視試験からの除外を期待している部位)
RPV と炉心の距離がより大きく、中性子がより減衰するた
今回は①について、解析的手法により 1 号機の中性子照
めである。なお、監視試験片(ドジメトリ結果)で校正を
射量と等価となる 4 号機の運転可能期間を推定したので、
行うこととした。
その成果について述べる。解析ツールとして、中性子束計
算コード ANISN や DORT を用いて浜岡 1 および 4 号機を比
較することとし、導出に必要な各種核データは両者で同じ
ものを用いた。同じデータを用いたのは、燃料集合体から
RPV までの距離の差など、両者の構造的な差のみを計算結
果に反映する目的のためである。
なお、②については、1/3 サイズのシャルピー衝撃試験
片やミニチュア破壊靭性試験片を用いて試験を実施し、
シャルピー衝撃試験は従来の監視試験と整合する結果を得
ており、破壊靭性試験については継続実施中である。
43
技術開発ニュース 2025.03/No.169
第 2 図 中性子束計算の方法
�
- ▲TOP
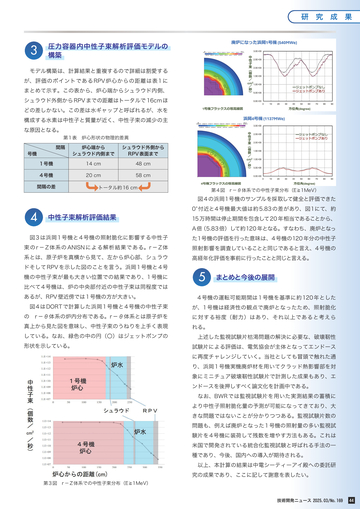
- ページ: 44
-
研 究 成 果
3
圧力容器内中性子束解析評価モデルの
構築
モデル構築は、計算結果と重複するので詳細は割愛する
が、評価のポイントである RPV 炉心からの距離は表 1 に
まとめて示す。この表から、炉心端からシュラウド内側、
シュラウド外側から RPV までの距離はトータルで 16cm ほ
どの差しかない。この差は水ギャップと呼ばれるが、水を
構成する水素は中性子と質量が近く、中性子束の減少の主
な原因となる。
第 1 表 炉心形状の物理的差異
間隔
炉心端から
シュラウド内側まで
シュラウド外側から
RPV 表面まで
1 号機
14 cm
48 cm
4 号機
20 cm
58 cm
号機
間隔の差
トータル約 16 cm
第 4 図 r -θ体系での中性子束分布(E ≧ 1MeV)
図 4 の浜岡1号機のサンプルを採取して健全と評価できた
4
中性子束解析評価結果
0° 付近と4 号機最大値は約 5.83 の差があり、図1にて、約
15 万時間は停止期間を包含して 20 年相当であることから、
A 倍(5.83 倍)して約120 年となる。すなわち、廃炉となっ
図 3 は浜岡 1 号機と 4 号機の照射脆化に影響する中性子
た1号機の評価を行った意味は、4 号機の120 年分の中性子
束の r - Z 体系の ANISN による解析結果である。r - Z 体
照射影響を調査していることと同じであると言え、4 号機の
系とは、原子炉を真横から見て、左から炉心部、シュラウ
高経年化評価を事前に行ったことと同じと言える。
ドそして RPV を示した図のことを言う。浜岡 1 号機と 4 号
機の中性子束が最も大きい位置での結果であり、1 号機に
比べて 4 号機は、炉の中央部付近の中性子束は同程度では
5
まとめと今後の展開
あるが、RPV 壁近傍では 1 号機の方が大きい。
4 号機の運転可能期間は 1 号機を基準に約 120 年とした
図 4 は DORT で計算した浜岡 1 号機と 4 号機の中性子束
が、1 号機は経済性の観点で廃炉となったため、照射脆化
の r -θ体系の炉内分布である。r -θ体系とは原子炉を
に対する裕度(耐力)はあり、それ以上であると考えら
真上から見た図を意味し、中性子束のうねりを上手く表現
れる。
している。なお、緑色の中の円(〇)はジェットポンプの
上述した監視試験片枯渇問題の解決に必要な、破壊靭性
形状を示している。
試験片による評価は、電気協会が主体となってエンドース
に再度チャレンジしていく。当社としても冒頭で触れた通
り、浜岡 1 号機実機廃炉材を用いてクラッド熱影響部を対
象にミニチュア破壊靭性試験片で計測した成果もあり、エ
ンドースを後押しすべく論文化を計画中である。
なお、BWR では監視試験片を用いた実測結果の蓄積に
より中性子照射脆化量の予測が可能になってきており、大
きな問題ではないことが分かりつつある。監視試験片数の
問題も、例えば廃炉となった 1 号機の照射量の多い監視試
験片を 4 号機に装荷して残数を増やす方法もある。これは
米国で開発されている統合化監視試験と呼ばれる手法の一
種であり、今後、国内への導入が期待される。
以上、本計算の結果は中電シーティーアイ殿への委託研
第 3 図 r - Z 体系での中性子束分布(E ≧ 1MeV)
究の成果であり、ここに記して謝意を表したい。
技術開発ニュース 2025.03/No.169
44
�
- ▲TOP
- ページ: 45
-
研 究 成 果
Results of Research Activities
長尺基礎ボルトの超音波による非破壊検査技術
の実機検証
Verification experiments on nondestructive inspection technology of long embedded bolts using
ultrasonic waves.
超音波シミュレーションと実物大基礎ボルトを用いたモックアップによ
る検討
本研究では、浜岡 3 号機で特別点検の対象となる長尺基礎ボルトを対象に、超音波伝播
シミュレーションによる予備検討と、実物大試験体を用いた検出試験を行い、超音波探傷
試験による欠陥の検出限界サイズを明らかにした。
執筆者
原子力安全技術研究所
プラントグループ
吉川 美奈子・熊野 秀樹
1
欠陥を加えて探傷することで、模擬欠陥の半径方向の深
背景および目的
さに対する検出性を確認した。模擬欠陥の位置は、ボルト
が埋め込まれたときに下部のナットと構造物との境界にあ
浜岡原子力発電所では、3 号機の運転期間延長認可申請
たるボルト底部側のねじ谷部に設定した。UT の試験条件
に向けて「特別点検」の実施方針が検討されている。原
は、説明性を確保するため先行して特別点検を実施した
では、特別点検の中で
他電力の方法にならい、JEAC4207-2008 および原子力
原子炉圧力容器およびサプレッションチェンバ(S/C:
安全推進協会の前身である日本原子力技術協会(JANTI:
Suppression Chamber) の 基 礎 ボ ル ト に 対 し て 非 破 壊
Japan Nuclear Technology Institute)のガイドライン [2]
検査手法の一つである超音波探傷試験(UT:Ultrasonic
に従った。
子力規制委員会の定めたガイド
[1]
Testing)によってボルト内部の欠陥の有無を確認するこ
とが求められている。しかし、浜岡 3 号機の点検対象ボル
トの中には、全長約 3 m の長尺ボルト(第 1 図(a)、(b))
が含まれており、先行して特別点検を実施した他電力の点
検対象と比較すると数割以上長尺であるため、従来の UT
方法では内部欠陥の検出が困難ではないかという懸念が
あった。
そこで本研究では、浜岡 3 号機の特別点検対象である長
尺基礎ボルトの UT による欠陥の検出限界を明らかにする
ことを目的に、超音波伝播シミュレーションによる探傷条
件の予備検討および実物大の試験体を用いた検出試験を
(a) ボルト底部の模擬欠陥 (b) ボルト断面模式図
第 2 図 実物大の試験体と模擬欠陥
行った。
第 1 表 JANTI のガイドラインに定められている試験条件
項目
条件
超音波探傷器
形
周波数
探触子
寸法
パルス反射式
垂直探触子
0.4~15 MHz
試験部の形状及び寸法に対して適合しており、超音波
が十分透過するもの
試験体ボルトの底面エコーを表示器上80%±5%の
基準感度
範囲にあわせ、その4倍の感度
基準感度による表 示機目盛において 、5%以上の
欠陥とみなす判定基準
エコーを有する指示部
(a) 基礎ボルト外観 (b) 埋込状態の基礎ボルト模式図
第 1 図 浜岡 3 号機の S/C サドルサポート用基礎ボルト
2
探傷条件の予備検討方法
(1) 検出試験
45
模擬欠陥の半径方向の深さを決定する際には、まず先行
他社で検出限界とされた欠陥サイズを参考にした。先行
他社のボルトと比べて、浜岡 3 号機の点検対象ボルトは全
長が長いことから、ボルト内部での超音波の減衰が大きく
なると考え、先行他社で検出限界とされた深さ 1.6 mm に
対して試験し、検出性を確認した。その結果、欠陥由来エ
検出試験では、点検対象となる基礎ボルトと同寸法のボ
コーの高さは最大 4 %であった。試験にあたっては、複数
ルトに第 2 図 (a)、(b) に示すようなスリット形状の模擬
の探触子径で探傷を試みたが、いずれにおいても欠陥由来
技術開発ニュース 2025.03/No.169
�
- ▲TOP
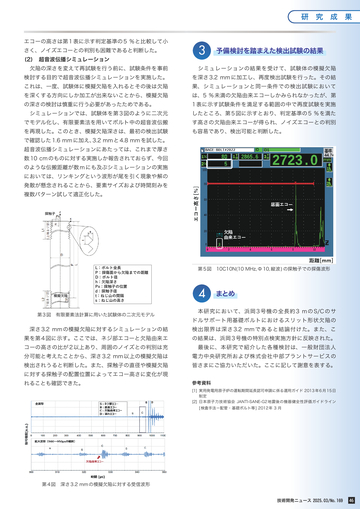
- ページ: 46
-
研 究 成 果
エコーの高さは第 1 表に示す判定基準の 5 % と比較して小
さく、ノイズエコーとの判別も困難であると判断した。
(2) 超音波伝播シミュレーション
3
予備検討を踏まえた検出試験の結果
欠陥の深さを変えて再試験を行う前に、試験条件を事前
シミュレーションの結果を受けて、試験体の模擬欠陥
検討する目的で超音波伝播シミュレーションを実施した。
を深さ 3.2 mm に加工し、再度検出試験を行った。その結
これは、一度、試験体に模擬欠陥を入れるとその後は欠陥
果、シミュレーションと同一条件での検出試験において
を深くする方向にしか加工が出来ないことから、模擬欠陥
は、5 % 未満の欠陥由来エコーしかみられなかったが、第
の深さの検討は慎重に行う必要があったためである。
1 表に示す試験条件を満足する範囲の中で再度試験を実施
シミュレーションでは、試験体を第 3 図のように二次元
したところ、第 5 図に示すとおり、判定基準の 5 % を満た
でモデル化し、有限要素法を用いてボルト中の超音波伝搬
す高さの欠陥由来エコーが得られ、ノイズエコーとの判別
を再現した。このとき、模擬欠陥深さは、最初の検出試験
も容易であり、検出可能と判断した。
で確認した 1.6 mm に加え、3.2 mm と 4.8 mm を試した。
超音波伝播シミュレーションにあたっては、これまで厚さ
数 10 cm のものに対する実施しか報告されておらず、今回
のような伝搬距離が数 m にも及ぶシミュレーションの実施
においては、リンキングという波形が尾を引く現象や解の
発散が懸念されることから、要素サイズおよび時間刻みを
複数パターン試して適正化した。
探触子
模擬欠陥
L:ボルト全長
P:探傷面から欠陥までの距離
D:ボルト径
h:欠陥深さ
Px:探触子の位置
d:探触子径
t:ねじ山の間隔
s:ねじ山の高さ
第 3 図 有限要素法計算に用いた試験体の二次元モデル
第 5 図 10C10N(10 MHz, Φ 10, 縦波 ) の探触子での探傷波形
4
まとめ
本研究において、浜岡 3 号機の全長約 3 m の S/C のサ
ドルサポート用基礎ボルトにおけるスリット形状欠陥の
深さ 3.2 mm の模擬欠陥に対するシミュレーションの結
検出限界は深さ 3.2 mm であると結論付けた。また、こ
果を第 4 図に示す。ここでは、ネジ部エコーと欠陥由来エ
の結果は、浜岡 3 号機の特別点検実施方針に反映された。
コーの高さの比が 2 以上あり、周囲のノイズとの判別は充
最後に、本研究で紹介した各種検討は、一般財団法人
分可能と考えたことから、深さ 3.2 mm 以上の模擬欠陥は
電力中央研究所および株式会社中部プラントサービスの
検出されうると判断した。また、探触子の直径や模擬欠陥
皆さまにご協力いただいた。ここに記して謝意を表する。
に対する探触子の配置位置によってエコー高さに変化が現
れることも確認できた。
参考資料
[1] 実用発電用原子炉の運転期間延長認可申請に係る運用ガイド 2013 年 6 月 15 日
制定
[2] 日本原子力技術協会 JANTI-SANE-G2 地震後の機器健全性評価ガイドライン
[ 検査手法-配管・ 基礎ボルト等 ] 2012 年 3 月
第 4 図 深さ 3.2 mm の模擬欠陥に対する受信波形
技術開発ニュース 2025.03/No.169
46
�
- ▲TOP
- ページ: 47
-
研 究 成 果
Results of Research Activities
ステンレス鋼のすき間構造内部に浸入した
塩化物イオン拡散挙動試験装置の開発
Development of the diffusion test device for chloride ions in crevices of the stainless steel
塩化物イオン濃度拡散過程の見える化
浜岡原子力発電所 5 号機の海水混入事象により、現在も海水由来の塩化物イオンが原子
炉内のすき間構造内に残存している可能性が否定しきれない。本研究では、ステンレス鋼
のすき間内部のイオン拡散挙動評価を目的に、すき間内の溶液導電率が測定可能なイオン
拡散挙動試験装置を開発した。
執筆者
原子力安全技術研究所
プラントグループ
大村 幸一郎
1
浜岡原子力発電所 5 号機の海水混入事象
2011 年 5 月、東日本大震災の影響により国からの停止
要請を受けた浜岡原子力発電所 5 号機は、原子炉停止操作
中の冷温停止過程で主復水器細管が損傷し、原子炉等に海
水が 400 m3 混入する事象が発生した(第 1 図)。原子炉お
よび炉内の構造物に海水による腐食が確認され(第 2 図)、
第 3 図 金属腐食の種類
腐食箇所の点検、機器の取替、脱塩水置換ならびに浄化系
運転による炉内の残留塩分除去を実施したが、現在も原子
すき間腐食の発生・進展過程には 5 つのステップがある。
炉内のすき間構造の内部に微量ながら海水由来の塩化物イ
①金属と酸素の反応による金属表面に不働態被膜の形成
オンが残留していることが否定しきれないため、すき間内
②不働態被膜の形成に伴うすき間内の酸素の枯渇
部に残留する塩化物イオンの浄化に資する挙動評価が課題
③塩化物イオンがある場合不働態被膜が破壊される
となっている。
④露出した金属表面から金属イオンが溶出(=すきま腐
食)
⑤溶出した金属イオン(+)に塩化物イオン(-)が引き
寄せられる
以上の流れにより、さらに不働態被膜が破壊されると
いった悪循環が起き、すき間腐食が広がる。塩化物イオン
がすき間内に多く残留している場合、腐食による減肉で部
材強度が低下する可能性があるため、残留している塩化物
イオンを浄化し、腐食を抑制する必要があるが、実機の浄
化と拡散挙動の関係は明らかになっていない。本研究で
第 1 図 浜岡 5 号機の海水混入事象
は、最適な浄化条件を見出すために、すき間内の残留塩化
物イオンの拡散挙動のメカニズムの特定を目的とした。
3
塩化物イオンの拡散挙動の見える化
(1)塩化物イオン拡散挙動試験装置の開発
第 2 図 原子炉内構造物の腐食
2
47
すき間腐食の発生原理と研究目的
すき間内の塩化物イオンの拡散挙動メカニズムの特定の
ためには、浄化中のイオン濃度拡散(溶質が濃度の薄い
方へ移動すること)の把握が必要であるが、すき間内の濃
度を直接計測するのは困難である。そこで、実機を模擬し
たすき間試験片を作製し、すき間内にセンサーを設置した
主要な金属腐食は大きく分けて 3 種類ある(第 3 図)。全
導電率測定装置(第 4 図)の開発を行った。センサーであ
面腐食や孔食は点検がしやすく、修理や機器の取替により
る電極から溶液に微弱な電流を流すことで電気抵抗を取得
健全性を確保できる。一方、すき間腐食は点検で見つけ出
し、導電率に変換する。これをイオン濃度に換算すること
すには限界があることから、適切な評価が必要になる。
で見える化が可能となる。
技術開発ニュース 2025.03/No.169
�
- ▲TOP
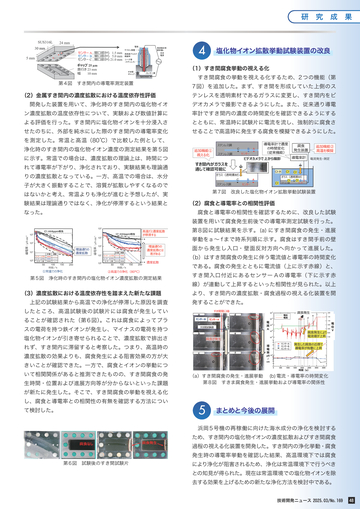
- ページ: 48
-
研 究 成 果
4
塩化物イオン拡散挙動試験装置の改良
(1)すき間腐食挙動の視える化
第 4 図 すき間内の導電率測定装置
(2)金属すき間内の濃度拡散における温度依存性評価
すき間腐食の挙動を視える化するため、2 つの機能(第
7 図)を追加した。まず、すき間を形成していた上側のス
テンレスを透明素材であるガラスに変更し、すき間内をビ
開発した装置を用いて、浄化時のすき間内の塩化物イオ
デオカメラで撮影できるようにした。また、従来通り導電
ン濃度拡散の温度依存性について、実験および数値計算に
率計ですき間内の濃度の時間変化を確認できるようにする
よる評価を行った。すき間内に塩化物イオンを十分浸入さ
とともに、常温時に試験片に電流を流し、強制的に腐食さ
せたのちに、外部を純水にした際のすき間内の導電率変化
せることで高温時に発生する腐食を模擬できるようにした。
を測定した。常温と高温(80℃)で比較した例として、
浄化時のすき間内の塩化物イオン濃度の測定結果を第 5 図
に示す。常温での場合は、濃度拡散の理論上は、時間につ
れて導電率が下がり、浄化されており、実験結果も理論通
りの濃度拡散となっている。一方、高温での場合は、水分
子が大きく振動することで、溶質が拡散しやすくなるので
はないかと考え、常温よりも浄化が進むと予想したが、実
験結果は理論通りではなく、浄化が停滞するという結果と
第 7 図 改良した塩化物イオン拡散挙動試験装置
(2)腐食と導電率との相関性評価
腐食と導電率の相関性を確認するために、改良した試験
なった。
装置を用いて腐食発生前後での導電率測定試験を行った。
第 8 図に試験結果を示す。(a) にすき間腐食の発生・進展
挙動を a ~ f まで時系列順に示す。腐食はすき間手前の壁
面から発生し入口・壁面反対方向へ向かって進展した。
(b)はすき間腐食の発生に伴う電流値と導電率の時間変化
である。腐食の発生とともに電流値(上に示す赤線)と、
第 5 図 浄化時のすき間内の塩化物イオン濃度拡散の測定結果
すき間入口付近にあるセンサー A の導電率(下に示す赤
(3)濃度拡散における温度依存性を踏まえた新たな課題
より、すき間内の濃度拡散・腐食過程の視える化装置を開
上記の試験結果から高温での浄化が停滞した原因を調査
線)が連動して上昇するといった相関性が見られた。以上
発することができた。
したところ、高温試験後の試験片には腐食が発生してい
ることが確認された(第 6 図)。これは腐食によってプラ
スの電荷を持つ鉄イオンが発生し、マイナスの電荷を持つ
塩化物イオンが引き寄せられることで、濃度拡散で排出さ
れず、すき間内に滞留すると考察した。つまり、高温時の
濃度拡散の効果よりも、腐食発生による阻害効果の方が大
きいことが確認できた。一方で、腐食とイオンの挙動につ
いて相関関係があると推測できたものの、すき間腐食の発
生時間・位置および進展方向等が分からないといった課題
(a)すき間腐食の発生・進展挙動 (b) 電流・導電率の時間変化
第 8 図 すきま腐食発生・進展挙動および導電率の関係性
が新たに発生した。そこで、すき間腐食の挙動を視える化
し、腐食と導電率との相関性の有無を確認する方法につい
て検討した。
5
まとめと今後の展開
浜岡 5 号機の再稼働に向けた海水成分の浄化を検討する
ため、すき間内の塩化物イオンの濃度拡散およびすき間腐食
過程の視える化装置を開発した。すき間内の浄化挙動・腐食
第 6 図 試験後のすき間試験片
発生時の導電率挙動を確認した結果、高温環境下では腐食
により浄化が阻害されるため、浄化は常温環境下で行うべき
との知見が得られた。現在は常温環境での塩化物イオンを除
去する効果を上げるための新たな浄化方法を検討中である。
技術開発ニュース 2025.03/No.169
48
�
- ▲TOP
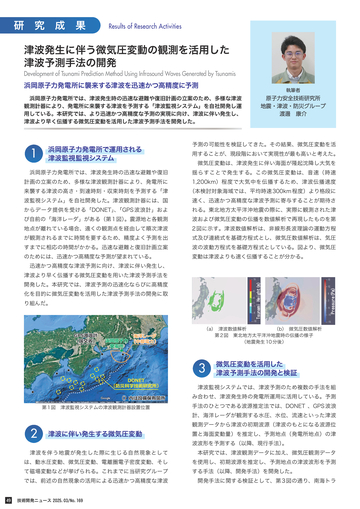
- ページ: 49
-
研 究 成 果
Results of Research Activities
津波発生に伴う微気圧変動の観測を活用した
津波予測手法の開発
Development of Tsunami Prediction Method Using Infrasound Waves Generated by Tsunamis
浜岡原子力発電所に襲来する津波を迅速かつ高精度に予測
浜岡原子力発電所では、津波発生時の迅速な避難や復旧計画の立案のため、多様な津波
観測計器により、発電所に来襲する津波を予測する「津波監視システム」を自社開発し運
用している。本研究では、より迅速かつ高精度な予測の実現に向け、津波に伴い発生し、
津波より早く伝播する微気圧変動を活用した津波予測手法を開発した。
執筆者
原子力安全技術研究所
地震・津波・防災グループ
渡邊 康介
1
浜岡原子力発電所で運用される
津波監視監視システム
浜岡原子力発電所では、津波発生時の迅速な避難や復旧
予測の可能性を検証してきた。その結果、微気圧変動を活
用することが、現段階において実現性が最も高いと考えた。
微気圧変動は、津波発生に伴い海面が隆起沈降し大気を
揺らすことで発生する。この微気圧変動は、音速(時速
計画の立案のため、多様な津波観測計器により、発電所に
1,200km)程度で大気中を伝播するため、津波伝播速度
来襲する津波の高さ・到達時刻・収束時刻を予測する「津
(本検討対象海域では、平均時速 300km 程度)より格段に
波監視システム」を自社開発した。津波観測計器には、国
速く、迅速かつ高精度な津波予測に寄与することが期待さ
からデータ提供を受ける「DONET」、「GPS 波浪計」およ
れる。東北地方太平洋沖地震の際に、実際に観測された津
び自前の「海洋レーダ」がある(第 1 図)
。震源地と各観測
波および微気圧変動の伝播を数値解析で再現したものを第
地点が離れている場合、遠くの観測点を経由して順次津波
2 図に示す。津波数値解析は、非線形長波理論の運動方程
が観測されるまでに時間を要するため、精度よく予測を出
式及び連続式を基礎方程式とし、微気圧数値解析は、気圧
すまでに相応の時間がかかる。迅速な避難と復旧計画立案
波の波動方程式を基礎方程式としている。図より、微気圧
のためには、迅速かつ高精度な予測が望まれている。
変動は津波よりも速く伝播することが分かる。
迅速かつ高精度な津波予測に向け、津波に伴い発生し、
Tsunami Height(m)
開発した。本研究では、津波予測の迅速化ならびに高精度
化を目的に微気圧変動を活用した津波予測手法の開発に取
り組んだ。
Pressure(Pa)
津波より早く伝播する微気圧変動を用いた津波予測手法を
(a) 津波数値解析 (b) 微気圧数値解析
第 2 図 東北地方太平洋沖地震時の伝播の様子
(地震発生 10 分後)
3
微気圧変動を活用した
津波予測手法の開発と検証
津波監視システムでは、津波予測のため複数の手法を組
み合わせ、津波発生時の発電所運用に活用している。予測
第 1 図 津波監視システムの津波観測計器設置位置
2
49
津波に伴い発生する微気圧変動
手法のひとつである波源推定法では、DONET 、GPS 波浪
計、海洋レーダが観測する水圧、水位、流速といった津波
観測データから津波の初期波源(津波のもとになる波源位
置と海面変動量)を推定し、予測地点(発電所地点)の津
波波形を予測する(以降、現行手法)。
津波を伴う地震が発生した際に生じる自然現象として
本研究では、津波観測データに加え、微気圧観測データ
は、動水圧変動、微気圧変動、電離圏電子密度変動、そし
を使用し、初期波源を推定し、予測地点の津波波形を予測
て磁場変動などが挙げられる。これまでに当研究グループ
する手法(以降、開発手法)を開発した。
では、前述の自然現象の活用による迅速かつ高精度な津波
開発手法に関する検証として、第 3 図の通り、南海トラ
技術開発ニュース 2025.03/No.169
�
- ▲TOP
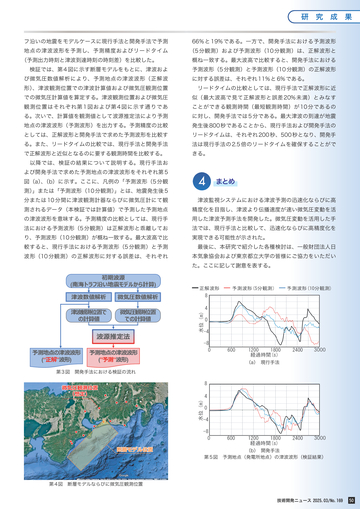
- ページ: 50
-
研 究 成 果
フ沿いの地震をモデルケースに現行手法と開発手法で予測
66% と 19% である。一方で、開発手法における予測波形
地点の津波波形を予測し、予測精度およびリードタイム
(5 分観測)および予測波形(10 分観測)は、正解波形と
(予測出力時刻と津波到達時刻の時刻差)を比較した。
概ね一致する。最大波高で比較すると、開発手法における
検証では、第 4 図に示す断層モデルをもとに、津波およ
予測波形(5 分観測)と予測波形(10 分観測)の正解波形
び微気圧数値解析により、予測地点の津波波形(正解波
に対する誤差は、それぞれ 11% と 6% である。
形)、津波観測位置での津波計算値および微気圧観測位置
リードタイムの比較としては、現行手法で正解波形に近
での微気圧計算値を算定する。津波観測位置および微気圧
似(最大波高で見て正解波形と誤差 20% 未満)とみなす
観測位置はそれぞれ第 1 図および第 4 図に示す通りであ
ことができる観測時間(最短観測時間)が 10 分であるの
る。次いで、計算値を観測値として波源推定法により予測
に対し、開発手法では 5 分である。最大津波の到達が地震
地点の津波波形(予測波形)を出力する。予測精度の比較
発生後 800 秒であることから、現行手法および開発手法の
としては、正解波形と開発手法で求めた予測波形を比較す
リードタイムは、それぞれ 200 秒、500 秒となり、開発手
る。また、リードタイムの比較では、現行手法と開発手法
法は現行手法の 2.5 倍のリードタイムを確保することがで
で正解波形と近似となるのに要する観測時間を比較する。
きる。
以降では、検証の結果について説明する。現行手法お
よび開発手法で求めた予測地点の津波波形をそれぞれ第 5
図(a)、(b)に示す。ここに、凡例の「予測波形(5 分観
測)」または「予測波形(10 分観測)」とは、地震発生後 5
4
まとめ
分または 10 分間に津波観測計器ならびに微気圧計にて観
津波監視システムにおける津波予測の迅速化ならびに高
測されるデータ(本検証では計算値)で予測した予測地点
精度化を目指し、津波より伝播速度が速い微気圧変動を活
の津波波形を意味する。予測精度の比較としては、現行手
用した津波予測手法を開発した。微気圧変動を活用した手
法における予測波形(5 分観測)は正解波形と乖離してお
法では、現行手法と比較して、迅速化ならびに高精度化を
り、予測波形(10 分観測)が概ね一致する。最大波高で比
実現できる可能性が示された。
較すると、現行手法における予測波形(5 分観測)と予測
最後に、本研究で紹介した各種検討は、一般財団法人日
波形(10 分観測)の正解波形に対する誤差は、それぞれ
本気象協会および東京都立大学の皆様にご協力をいただい
た。ここに記して謝意を表する。
津波数値解析
微気圧数値解析
津波観測位置で
の計算値
微気圧観測位置
での計算値
波源推定法
予測地点の津波波形
(“正解”波形)
正解波形
予測波形(5分観測)
予測波形(10分観測)
8
水位(m)
初期波源
(南海トラフ沿い地震モデルから計算)
4
0
-4
-8
0
予測地点の津波波形
(”予測”波形)
600
1200
1800
経過時間(s)
2400
3000
2400
3000
(a) 現行手法
第 3 図 開発手法における検証の流れ
8
水位(m)
微気圧観測位置
(想定)
4
0
-4
-8
0
断層モデル位置
600
1200
1800
経過時間(s)
(b) 開発手法
第 5 図 予測地点(発電所地点)の津波波形(検証結果)
第 4 図 断層モデルならびに微気圧観測位置
技術開発ニュース 2025.03/No.169
50
�
- ▲TOP
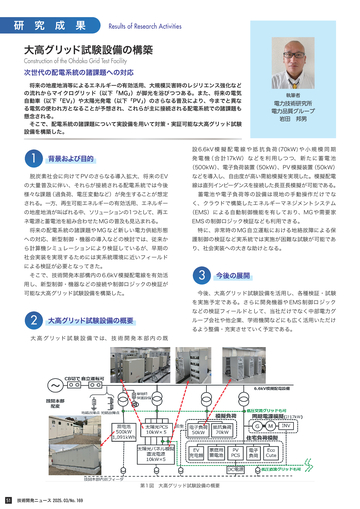
- ページ: 51
-
研 究 成 果
Results of Research Activities
大高グリッド試験設備の構築
Construction of the Ohdaka Grid Test Facility
次世代の配電系統の諸課題への対応
将来の地産地消等によるエネルギーの有効活用、大規模災害時のレジリエンス強化など
の流れからマイクログリッド(以下「MG」)が脚光を浴びつつある。また、将来の電気
自動車(以下「EV」)や太陽光発電(以下「PV」
)のさらなる普及により、今までと異な
る電気の使われ方となることが予想され、これらが主に接続される配電系統での諸課題も
懸念される。
そこで、配電系統の諸課題について実設備を用いて対策・実証可能な大高グリッド試験
設備を構築した。
執筆者
電力技術研究所
電力品質グループ
岩田 邦男
1
設 6.6kV 模 擬 配 電 線 や 抵 抗 負 荷(70kW)や 小 規 模 同 期
背景および目的
発 電 機( 合 計17kW) などを利 用しつつ、 新 たに蓄 電 池
(500kW)、電子負荷装置(50kW)、PV 模擬装置(50kW)
脱炭素社会に向けてPVのさらなる導入拡大、将来の EV
などを導入し、自由度が高い需給模擬を実現した。模擬配電
の大量普及に伴い、それらが接続される配電系統では今後
線は直列インピーダンスを接続した長亘長模擬が可能である。
様々な課題(過負荷、電圧変動など)が発生することが想定
蓄電池や電子負荷等の設備は現地の手動操作だけでな
される。一方、再生可能エネルギーの有効活用、エネルギー
く、クラウドで構築したエネルギーマネジメントシステム
の地産地消が叫ばれる中、ソリューションの1つとして、再エ
(EMS)による自動制御機能を有しており、MG や需要家
ネ電源と蓄電池を組み合わせた MG の普及も見込まれる。
EMS の制御ロジック検証なども利用できる。
将来の配電系統の諸課題や MG など新しい電力供給形態
特に、非常時の MG 自立運転における地絡故障による保
への対応、新型制御・機器の導入などの検討では、従来か
護制御の検証など実系統では実施が困難な試験が可能であ
ら計算機シミュレーションにより検証しているが、早期の
り、社会実装への大きな助けとなる。
社会実装を実現するためには実系統環境に近いフィールド
による検証が必要となってきた。
そこで、技術開発本部構内の 6.6kV 模擬配電線を有効活
用し、新型制御・機器などの接続や制御ロジックの検証が
3
今後の展開
今後、大高グリッド試験設備を活用し、各種検証・試験
可能な大高グリッド試験設備を構築した。
を実施予定である。さらに開発機器や EMS 制御ロジック
2
などの検証フィールドとして、当社だけでなく中部電力グ
大高グリッド試験設備の概要
ループ会社や他企業、学術機関などにも広く活用いただけ
るよう整備・充実させていく予定である。
大 高 グ リッド 試 験 設 備 で は、 技 術 開 発 本 部 内 の 既
第 1 図 大高グリッド試験設備の概要
51
技術開発ニュース 2025.03/No.169
2024.03/No.168
�
- ▲TOP
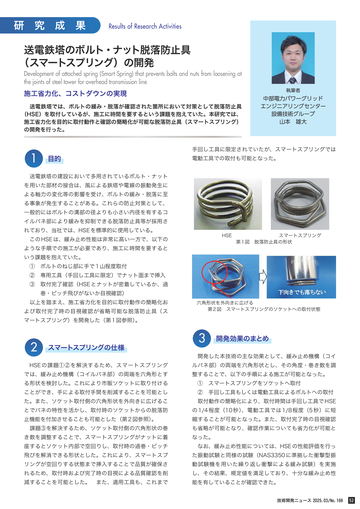
- ページ: 52
-
研 究 成 果
研 究 成 果
Results of Research Activities
送電鉄塔のボルト・ナット脱落防止具
(スマートスプリング)の開発
Development of attached spring (Smart Spring) that prevents bolts and nuts from loosening at
the joints of steel tower for overhead transmission line
執筆者
施工省力化、コストダウンの実現
送電鉄塔では、ボルトの緩み・脱落が確認された箇所において対策として脱落防止具
(HSE)を取付しているが、施工に時間を要するという課題を抱えていた。本研究では、
施工省力化を目的に取付動作と確認の簡略化が可能な脱落防止具(スマートスプリング)
の開発を行った。
中部電力パワーグリッド
エンジニアリングセンター
設備技術グループ
山本 雄大
1
目的
手回し工具に限定されていたが、スマートスプリングでは
電動工具での取付も可能となった。
送電鉄塔の建設において多用されているボルト・ナット
を用いた部材の接合は、風による鉄塔や電線の振動発生に
よる軸力の変化等の影響を受け、ボルトの緩み・脱落に至
る事象が発生することがある。これらの防止対策として、
一般的にはボルトの溝部の径よりも小さい内径を有するコ
イルバネ部により緩みを抑制できる脱落防止具等が採用さ
れており、当社では、HSE を標準的に使用している。
この HSE は、緩み止め性能は非常に高い一方で、以下の
ような手順での施工が必要であり、施工に時間を要すると
HSE スマートスプリング
第 1 図 脱落防止具の形状
いう課題を抱えていた。
① ボルトのねじ部に手で 1 山程度取付
② 専用工具(手回し工具に限定)でナット面まで挿入
③ 取付完了確認(HSE とナットが密着しているか、過
巻・ピッチ飛びがないか目視確認)
以上を踏まえ、施工省力化を目的に取付動作の簡略化お
よび取付完了時の目視確認が省略可能な脱落防止具(ス
六角形状を外向きに広げる
第 2 図 スマートスプリングのソケットへの取付状態
マートスプリング)を開発した(第 1 図参照)。
2
スマートスプリングの仕様
3
開発効果のまとめ
開発した本技術の主な効果として、緩み止め機構(コイ
HSE の課題①②を解決するため、スマートスプリング
ルバネ部)の両端を六角形状とし、その角度・巻き数を調
では、緩み止め機構(コイルバネ部)の両端を六角形とす
整することで、以下の手順による施工が可能となった。
る形状を検討した。これにより市販ソケットに取り付ける
① スマートスプリングをソケットへ取付
ことができ、手による取付手間を削減することを可能とし
② 手回し工具もしくは電動工具によるボルトへの取付
た。また、ソケット取付側の六角形状を外向きに広げるこ
取付動作の簡略化により、取付時間は手回し工具で HSE
とでバネの特性を活かし、取付時のソケットからの脱落防
の 1/4 程度(10 秒)、電動工具では 1/8 程度(5 秒)に短
止機能を付加させることも可能とした(第 2 図参照)。
縮することが可能となった。また、取付完了時の目視確認
課題③を解決するため、ソケット取付側の六角形状の巻
も省略が可能となり、確認作業についても省力化が可能と
き数を調整することで、スマートスプリングがナットに着
なった。
座するとソケット内部で空回りし、取付時の過巻・ピッチ
なお、緩み止め性能については、HSE の性能評価を行っ
飛びを解消できる形状とした。これにより、スマートスプ
た振動試験と同様の試験(NAS3350 に準拠した衝撃型振
リングが空回りする状態まで挿入することで品質が確保さ
動試験機を用いた繰り返し衝撃による緩み試験)を実施
れるため、取付時および完了時の目視による品質確認を削
し、その結果、規定値を満足しており、十分な緩み止め性
減することを可能とした。 また、適用工具も、これまで
能を有していることが確認できた。
技術開発ニュース 2025.03/No.169
2024.03/No.168
52
�
- ▲TOP
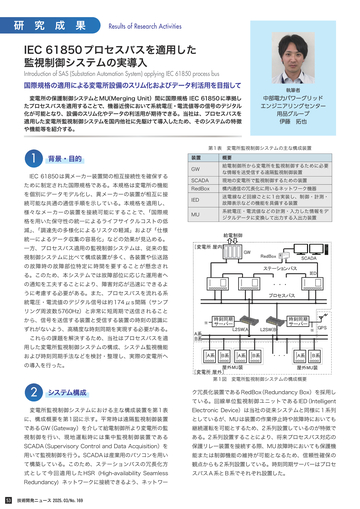
- ページ: 53
-
研 究 成 果
Results of Research Activities
IEC 61850 プロセスバスを適用した
監視制御システムの実導入
Introduction of SAS (Substation Automation System) applying IEC 61850 process bus
国際規格の適用による変電所設備のスリム化およびデータ利活用を目指して
執筆者
変電所の保護制御システムとMU
(Merging Unit)間に国際規格 IEC 61850 に準拠し
たプロセスバスを適用することで、機器近傍において系統電圧・電流値等の信号のデジタル
化が可能となり、設備のスリム化やデータの利活用が期待できる。当社は、プロセスバスを
適用した変電所監視制御システムを国内他社に先駆けて導入したため、そのシステムの特徴
や機能等を紹介する。
中部電力パワーグリッド
エンジニアリングセンター
用品グループ
伊藤 拓也
1
第 1 表 変電所監視制御システムの主な構成装置
背景・目的
IEC 61850 は異メーカー装置間の相互接続性を確保する
ために制定された国際規格である。本規格は変電所の機能
を個別にデータモデル化し、異メーカーの装置が相互に接
続可能な共通の通信手順を示している。本規格を適用し、
様々なメーカーの装置を接続可能にすることで、「国際規
格を用いた保守性の統一によるライフサイクルコストの低
装置
概要
GW
給電制御所から変電所を監視制御するために必要
な情報を送受信する遠隔監視制御装置
SCADA
現地の変電所で監視制御するための装置
RedBox
構内通信の冗長化に用いるネットワーク機器
IED
送電線など回線ごとに 1 台実装し、制御・計測・
故障表示などの機能を具備する装置
MU
系統電圧・電流値などの計測・入力した情報をデ
ジタルデータに変換して出力する入出力装置
減」、「調達先の多様化によるリスクの軽減」および「仕様
給電制御
統一によるデータ収集の容易化」などの効果が見込める。
一方、プロセスバス適用の監視制御システムは、従来の監
[変電所 屋内]
GW
視制御システムに比べて構成装置が多く、各装置や伝送路
RedBox
の故障時の故障部位特定に時間を要することが懸念され
SCADA
ステーションバス
る。このため、本システムでは故障部位に応じた運用者へ
IED
の通知を工夫することにより、障害対応が迅速にできるよ
・ ・ ・
うに考慮する必要がある。また、プロセスバスを流れる系
プロセスバス
統電圧・電流値のデジタル信号は約 174 μ s 間隔(サンプ
リング周波数 5760Hz)と非常に短周期で送信されること
から、信号を送信する装置と受信する装置の時刻の認識に
ずれがないよう、高精度な時刻同期を実現する必要がある。
これらの課題を解決するため、当社はプロセスバスを適
※
A系
B系
時刻同期
サーバー
L2SW(A)
時刻同期
サーバー
L2SW(B)
※
GPS
用した変電所監視制御システムの構成、システム監視機能
および時刻同期手法などを検討・整理し、実際の変電所へ
の導入を行った。
A系
B系
A系
B系
・ ・ ・
屋外MU装
[変電所 屋外]
A系
B系
屋外MU装
第 1 図 変電所監視制御システムの構成概要
2
システム構成
ている。回線単位監視制御ユニットである IED(Intelligent
変電所監視制御システムにおける主な構成装置を第 1表
Electronic Device)は当社の従来システムと同様に1系列
に、構成概要を第 1図に示す。平常時は遠隔監視制御装置
としているが、MU は装置の作業停止時や故障時においても
である GW(Gateway)を介して給電制御所より変電所の監
継続運転を可能とするため、2 系列設置しているのが特徴で
視制御を行い、現地運転時には集中監視制御装置である
ある。2 系列設置することにより、将来プロセスバス対応の
SCADA(Supervisory Control and Data Acquisition)を
保護リレー装置を接続する際、MU 故障時においても保護機
用いて監視制御を行う。SCADA は産業用のパソコンを用い
能または制御機能の維持が可能となるため、信頼性確保の
て構築している。このため、ステーションバスの冗長化方
観点からも 2 系列設置している。時刻同期サーバーはプロセ
式として今回適 用した HSR (High-availability Seamless
スバス A 系とB 系でそれぞれ設置した。
Redundancy) ネットワークに接続できるよう、ネットワー
53
ク冗長化装置である RedBox(Redundancy Box)を採用し
技術開発ニュース 2025.03/No.169
�
- ▲TOP
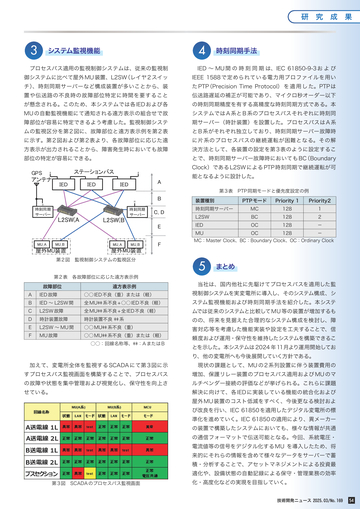
- ページ: 54
-
研 究 成 果
3
4
システム監視機能
時刻同期手法
プロセスバス適用の監視制御システムは、従来の監視制
IED ~ MU 間 の 時 刻 同 期 は、IEC 61850-9-3 お よ び
御システムに比べて屋外 MU 装置、L2SW(レイヤ 2 スイッ
IEEE 1588 で定められている電力用プロファイルを用い
チ)、時刻同期サーバーなど構成装置が多いことから、装
た PTP(Precision Time Protocol) を 適 用 し た。PTP は
置や伝送路の不良時の故障部位特定に時間を要すること
伝送路遅延の補正が可能であり、マイクロ秒オーダー以下
が懸念される。このため、本システムでは各 IED および各
の時刻同期精度を有する高精度な時刻同期方式である。本
MU の自動監視機能にて通知される遠方表示の組合せで故
システムでは A 系と B 系のプロセスバスそれぞれに時刻同
障部位が容易に特定できるよう考慮した。監視制御システ
期サーバー(時計装置)を設置した。プロセスバスは A 系
ムの監視区分を第 2 図に、故障部位と遠方表示例を第 2 表
と B 系がそれぞれ独立しており、時刻同期サーバー故障時
に示す。第 2 図および第 2 表より、各故障部位に応じた遠
に片系のプロセスバスの継続運転が困難となる。その解
方表示が出力されることから、障害発生時においても故障
決方法として、各装置の設定を第 3 表のように設定するこ
部位の特定が容易にできる。
とで、時刻同期サーバー故障時においても BC(Boundary
Clock)である L2SW による PTP 時刻同期で継続運転が可
ステーションバス
GPS
アンテナ
IED
IED
A
IED
第 3 表 PTP 同期モードと優先度設定の例
B
※
※
時刻同期
サーバー
L2SW(A
時刻同期
サーバー
C, D
L2SW(B
E
MU_A
MU_B
屋外MU装置
MU_A
MU_B
F
装置種別
PTP モード
Priority 1
Priority2
時刻同期サーバー
MC
128
1
L2SW
BC
128
2
IED
OC
128
-
MU
OC
128
-
MC:Master Clock、BC:Boundary Clock、OC:Ordinary Clock
屋外MU装置
第 2 図 監視制御システムの監視区分
第 2 表 各故障部位に応じた遠方表示例
故障部位
能となるように設計した。
遠方表示例
5
まとめ
当社は、国内他社に先駆けてプロセスバスを適用した監
視制御システムを実変電所に導入し、そのシステム構成、シ
A
IED 故障
○○ IED 不良(重)または(軽)
B
IED ~ L2SW 間
全 MU** 系不良 + ○○ IED 不良(軽)
ステム監視機能および時刻同期手法を紹介した。本システ
ムでは従来のシステムと比較して MU 等の装置が増加するも
C
L2SW 故障
全 MU** 系不良 + 全 IED 不良(軽)
D
時計装置故障
時計装置不良 ** 系
E
L2SW ~ MU 間
○○ MU** 系不良(重)
F
MU 故障
○○ MU** 系不良(重)または(軽)
○○:回線名称等、**:A または B
のの、将来を見据えた合理的なシステム構成を検討し、障
害対応等を考慮した機能実装や設定を工夫することで、信
頼度および運用・保守性を維持したシステムを構築できるこ
とを示した。本システムは 2024 年11月より運用開始してお
り、他の変電所へも今後展開していく方針である。
加えて、変電所全体を監視する SCADA にて第 3 図に示
現状の課題として、MU の 2 系列設置に伴う装置費用の
すプロセスバス監視画面を構築することで、プロセスバス
増加、保護リレー装置のプロセスバス適用および MU のマ
の故障や状態を集中管理および視覚化し、保守性を向上さ
ルチベンダー接続の評価などが挙げられる。これらに課題
せている。
解決に向けて、各 IED に実装している機能の統合化および
屋外 MU 装置のコスト低減をすべく、今後更なる検討およ
び改良を行い、IEC 61850 を適用したデジタル変電所の標
A送電線 1L
A送電線 2L
B送電線 1L
B送電線 2L
ブスセクション
第 3 図 SCADA のプロセスバス監視画面
準化を進めていく。IEC 61850 の適用により、異メーカー
の装置で構築したシステムにおいても、様々な情報が共通
の通信フォーマットで伝送可能となる。今回、系統電圧・
電流値等の信号をデジタル化する MU を導入したため、将
来的にそれらの情報を含めて様々なデータをサーバーで蓄
積・分析することで、アセットマネジメントによる投資最
適化や、設備状態の自動記録による保守・管理業務の効率
化・高度化などの実現を目指していく。
技術開発ニュース 2025.03/No.169
54
�
- ▲TOP
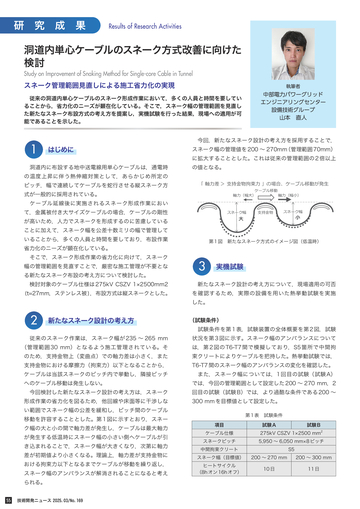
- ページ: 55
-
研 究 成 果
Results of Research Activities
洞道内単心ケーブルのスネーク方式改善に向けた
検討
Study on Improvement of Snaking Method for Single-core Cable in Tunnel
スネーク管理範囲見直しによる施工省力化の実現
執筆者
中部電力パワーグリッド
エンジニアリングセンター
設備技術グループ
山本 直人
従来の洞道内単心ケーブルのスネーク形成作業において,多くの人員と時間を要してい
ることから,省力化のニーズが顕在化している。そこで,スネーク幅の管理範囲を見直し
た新たなスネーク布設方式の考え方を提案し,実機試験を行った結果,現場への適用が可
能であることを示した。
1
はじめに
洞道内に布設する地中送電線用単心ケーブルは,通電時
今回,新たなスネーク設計の考え方を採用することで,
スネーク幅の管理値を 200 ~ 270mm(管理範囲 70mm)
に拡大することとした。これは従来の管理範囲の 2 倍以上
の値となる。
の温度上昇に伴う熱伸縮対策として,あらかじめ所定の
ピッチ,幅で連続してケーブルを蛇行させる縦スネーク方
「 軸力差 > 支持金物拘束力 」の場合、ケーブル移動が発生
ケーブル移動
軸力(幅大)
軸力(幅小)
式が一般的に採用されている。
ケーブル延線後に実施されるスネーク形成作業におい
て,金属被付き大サイズケーブルの場合,ケーブルの剛性
スネーク幅
大
が高いため,人力でスネークを形成するのに苦慮している
支持金物
スネーク幅
小
ことに加えて,スネーク幅を公差十数ミリの幅で管理して
いることから,多くの人員と時間を要しており,布設作業
第 1 図 新たなスネーク方式のイメージ図(低温時)
省力化のニーズが顕在化している。
そこで,スネーク形成作業の省力化に向けて,スネーク
幅の管理範囲を見直すことで,厳密な施工管理が不要とな
る新たなスネーク布設の考え方について検討した。
3
実機試験
検討対象のケーブル仕様は 275kV CSZV 1×2500mm2
新たなスネーク設計の考え方について,現場適用の可否
(t=27mm,ステンレス被 ),布設方式は縦スネークとした。
を確認するため,実際の設備を用いた熱挙動試験を実施
した。
2
新たなスネーク設計の考え方
(試験条件)
試験条件を第 1 表,試験装置の全体概要を第 2 図,試験
従来のスネーク作業は,スネーク幅が 235 ~ 265 mm
状況を第 3 図に示す。スネーク幅のアンバランスについて
(管理範囲 30 mm)となるよう施工管理されている。そ
は,第 2 図の T6-T7 間で模擬しており,S5 箇所で中間拘
のため,支持金物上(変曲点)での軸力差は小さく,また
束クリートによりケーブルを把持した。熱挙動試験では,
支持金物における摩擦力(拘束力)以下となることから,
T6-T7 間のスネーク幅のアンバランスの変化を確認した。
ケーブルは当該スネークのピッチ内で挙動し,隣接ピッチ
また,スネーク幅については,1 回目の試験(試験 A)
へのケーブル移動は発生しない。
では,今回の管理範囲として設定した 200 ~ 270 mm,2
今回検討した新たなスネーク設計の考え方は,スネーク
回目の試験(試験 B)では,より過酷な条件である 200 ~
形成作業の省力化を図るため,他回線や床面等に干渉しな
300 mm を目標値として設定した。
い範囲でスネーク幅の公差を緩和し,ピッチ間のケーブル
移動を許容することとした。第 1 図に示すとおり,スネー
ク幅の大と小の間で軸力差が発生し,ケーブルは最大軸力
が発生する低温時にスネーク幅の小さい側へケーブルが引
き込まれることで,スネーク幅が大きくなり,次第に軸力
差が初期値より小さくなる。理論上,軸力差が支持金物に
おける拘束力以下となるまでケーブルが移動を繰り返し,
スネーク幅のアンバランスが解消されることになると考え
られる。
55
技術開発ニュース 2025.03/No.169
第 1 表 試験条件
項目
試験 A
試験 B
ケーブル仕様
275kV CSZV 1×2500 mm2
スネークピッチ
5,950 ~ 6,050 mm×8 ピッチ
中間拘束クリート
S5
スネーク幅(目標値)
200 ~ 270 mm
200 ~ 300 mm
ヒートサイクル
(8h オン 16h オフ)
10 日
11 日
�
- ▲TOP
- ページ: 56
-
研 究 成 果
40 mm であったことに対して,試験 B では 47 mm であ
り,試験 A と同程度になるまで長手方向にケーブルが移動
することが想定される。
スネーク幅の変位および長手方向のケーブル変位での結
果より,実機においてもアンバランスを解消する方向に
ケーブルが移動し,かつ最終的には飽和傾向を示すことを
第2図 試験装置全体概要
確認した。
右側
(T7側)
右方向(幅大→幅小)へ
1.7mm
1.3mm
第 3図 試験状況
左側
(T5側)
(試験結果)
< 1 >スネーク幅の変位 各ピッチにおけるスネーク幅
の初期値とその後の変位を第 2 表に示す。初期設定時から
第 4図 長手方向のケーブル変位(試験 A)
ヒートサイクル開始前までにスネーク幅のアンバランス
(T6-T7)は,自重や試通電による熱膨張の影響により減
少傾向となることが確認できた。加えて,ヒートサイクル
後のアンバランスにおいても,試験 A では 43 mm から 40
右側
(T7側)
右方向(幅大→幅小)へ
mm,試験 B では 51 mm から 47 mm とそれぞれ減少傾向
1.2mm
となることが確認できた。
0.3mm
第 2 表 スネーク幅の変位
スネーク幅 小
試
験
A
T2
T3
T4
T5
T6
T7
T8
T6-T7
目標値
200
200
200
200
270
270
200
200
(70)
初期設定時
197
205
208
205
270
267
204
205
63
試通電前
211
213
218
219
279
280
222
248
58
1 サイクル目開始時 215
216
225
223
268
271
228
258
43
10 サイクル目終了時 222
試
験
B
スネーク幅 大 スネーク幅 小
T1
左側
(T5側)
第5図 長手方向のケーブル変位(試験 B)
4
まとめ
223
234
230
269
274
234
261
40
目標値
230
230
230
200
300
300
200
230
(100)
初期設定時
220
220
255
225
295
307
230
225
77
実機による熱挙動試験の結果,スネーク幅のアンバラ
試通電前
219
219
253
222
293
305
229
223
76
ンスが解消される方向にケーブルが移動することを確認
1 サイクル目開始時 220
224
242
242
288
294
243
225
51
11 サイクル目終了時 225
229
245
249
290
294
247
229
47
した。その結果,スネーク幅の管理範囲を従来の 235 ~
< 2 >長手方向のケーブル変位 S6,S7 におけるヒート
265 mm(管理範囲 30 mm)から 200 ~ 270 mm(管理
範囲 70 mm)に拡大したスネーク布設は,現場への適用
が可能であることを示した。
サイクル時の長手方向のケーブル変位を第 4 図,第 5 図に
今後は洞道内単心ケーブル工事に適用していく予定で
示す。昇温時には,スネーク幅の大きい T5 の方向(左側)
ある。
へケー ブ ル が 移 動 し, 降 温 時 に は T7 の 方 向( 右 側)へ
ケーブルが移動している。この移動は,軸力計算によって
得られる軸力差の向きと一致している。
S7 において,累積変位量は試験 A では 1.7 mm であり,
参考文献
1) CV ケーブル工事技術専門委員会:「CV ケーブル線路における工事技術の現状
と今後の展望」
,電気協同研究,第 61 巻,第 1 号
6 サイクル目から飽和状態となっている。試験 B では 1.2
mm となっているが,飽和状態とはなっていない。これは
試験 A ではヒートサイクル後の T6-T7 間のアンバランスが
技術開発ニュース 2025.03/No.169
56
�
- ▲TOP
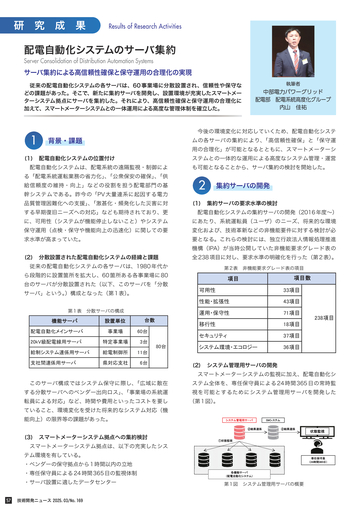
- ページ: 57
-
研 究 成 果
Results of Research Activities
配電自動化システムのサーバ集約
Server Consolidation of Distribution Automation Systems
サーバ集約による高信頼性確保と保守運用の合理化の実現
執筆者
従来の配電自動化システムの各サーバは、60 事業場に分散設置され、信頼性や保守な
どの課題があった。そこで、新たに集約サーバを開発し、設置環境が充実したスマートメー
ターシステム拠点にサーバを集約した。それにより、高信頼性確保と保守運用の合理化に
加えて、スマートメーターシステムとの一体運用による高度な管理体制を確立した。
中部電力パワーグリッド
配電部 配電系統高度化グループ
内山 佳祐
1
今後の環境変化に対応していくため、配電自動化システ
背景・課題
ムの各サーバの集約により、「高信頼性確保」と「保守運
用の合理化」が可能となるとともに、スマートメーターシ
(1) 配電自動化システムの位置付け
ステムとの一体的な運用による高度なシステム管理・運営
配電自動化システムは、配電系統の遠隔監視・制御によ
る「配電系統運転業務の省力化」、「公衆保安の確保」、「供
給信頼度の維持・向上」などの役割を担う配電部門の基
幹システムである。昨今の「PV 大量連系に起因する電力
品質管理困難化への支援」、「激甚化・頻発化した災害に対
する早期復旧ニーズへの対応」なども期待されており、更
も可能となることから、サーバ集約の検討を開始した。
2
集約サーバの開発
(1) 集約サーバの要求水準の検討
配電自動化システムの集約サーバの開発(2016 年度~)
に、可用性(システムが機能停止しないこと)やシステム
にあたり、系統運転員(ユーザ)のニーズ、将来的な環境
保守運用(点検・保守や機能向上の迅速化)に関しての要
変化および、技術革新などの非機能要件に対する検討が必
求水準が高まっていた。
要となる。これらの検討には、独立行政法人情報処理推進
機構(IPA)が当時公開していた非機能要求グレード表の
(2) 分散設置された配電自動化システムの経緯と課題
全 238 項目に対し、要求水準の明確化を行った(第 2 表)。
従来の配電自動化システムの各サーバは、1980 年代か
第 2 表 非機能要求グレード表の項目
ら段階的に設置箇所を拡大し、60 箇所ある各事業場に 80
台のサーバが分散設置された(以下、このサーバを「分散
サーバ」という。)構成となった(第 1 表)。
第 1 表 分散サーバの構成
機能サーバ
設置単位
台数
配電自動化メインサーバ
事業場
60台
20kV級配電線用サーバ
特定事業場
3台
給制システム連係用サーバ
給電制御所
11台
支社間連係用サーバ
県対応支社
6台
80台
項目数
項目
可用性
33項目
性能・拡張性
43項目
運用・保守性
71項目
移行性
18項目
セキュリティ
37項目
システム環境・エコロジー
36項目
238項目
(2) システム管理用サーバの開発
スマートメーターシステムの監視に加え、配電自動化シ
このサーバ構成ではシステム保守に際し、「広域に散在
する分散サーバへのベンダー出向ロス」、「事業場の系統運
転員による対応」など、時間や費用といったコストを要し
ステム全体を、専任保守員による 24 時間 365 日の常時監
視を可能とするためにシステム管理用サーバを開発した
(第 1 図)。
ていること、環境変化を受けた将来的なシステム対応(機
能向上)の限界等の課題があった。
システム管理用サーバ
②結果連係
(3) スマートメーターシステム拠点への集約検討
スマートメーターシステム拠点は、以下の充実したシス
SMシステム
②結果連係
①状態監視
テム環境を有している。
専任保守員
(24時間365日)
・ベンダーの保守拠点から 1 時間以内の立地
・専任保守員による 24 時間 365 日の監視体制
・サーバ設置に適したデータセンター
57
技術開発ニュース 2025.03/No.169
状態監視
各機能サーバ
(配電自動化システム)
第 1 図 システム管理用サーバの概要
�
- ▲TOP
- ページ: 58
- 研 究 成 果
(3)
ログイン認証用サーバの開発
セキュリティ強化を目的に、スマートメーターシステム
の認証機能との連係によるユーザ認証機能を具備するた
め、ログイン認証用サーバを開発した(第 2 図)。
配電自動化メインサーバ
ログイン認証用サーバ
①情報入力
②情報確認
④認証
③確認結果
SMシステム
アカウント連係
3
(1)
効果の一例
システム障害の復旧時間短縮
サーバ集約にて、出向時間の短縮に加え、専任保守員に
よる原因調査に必要なログ取得の迅速化や、サーバ再起動
等の簡易な復旧操作といった保守体制の強化により、6 時
間以内の障害復旧を実現した(第 4 図)。
集約前
初動対応
ベンダーコール
異常検知
最大
1.5時間
最大
5時間
現地出向
調査
(復旧)
系統運転員
第 2 図 ログイン認証用サーバの概要
(4)
集約後
集約サーバのシステム構成
異常検知
保守体制の強化
による短縮
拠点集約
による短縮
初動対応
ベンダーコール
現地出向
集約サーバは、仮想化技術を用いて開発し、物理的な
6時間以内
(これまでの実績:2.5時間)
サーバ台数の削減を検討した。サーバ台数の削減にあたっ
ては、既存のデータ処理負荷だけでなく、将来の拡張性に
も考慮して慎重に検討した。また、大規模災害等にて拠
点が被災した場合に、配電自動化システムに関連した業
調査
(復旧)
第 4 図 システム障害の復旧時間短縮イメージ図
(2)
ソフトウェア更新期間の短縮
ソフトウェア配信支援機能の開発および、サーバ集約によ
務(系統運転業務全般)が全社的に不能となるリスクに備
る環境整備により、
「ベンダー出向箇所の削減」、
「ソフトウェ
え、拠点とは別の場所に災害対策環境を構築し、可用性を
ア自動配信」、
「専任保守員による一括更新」が可能となり、
向上した(第 3 表)。
不具合やセキュリティ対応の迅速化を実現した(第 4 表)。
第 4 表 ソフトウェア更新期間の短縮
第 3 表 集約サーバのシステム構成
集約サーバ
機能サーバ
既設
新規
集約拠点
分散サーバ
災害環境
(参考)
配電自動化メインサーバ
4台
4台
60台
20kV級配電線用サーバ
1台
1台
3台
給制システム連係用サーバ
1台
1台
11台
6台
支社間連係用サーバ
1台
1台
システム管理用サーバ
1台
1台
ログイン認証用サーバ
1台
1台
合計サーバ台数
分散サーバの対応期間
(3)
集約サーバの対応期間
配信
5日
配信
1日
更新
10日
更新
1日
合計
15日
合計
2日
コスト
分散サーバにて、災害対策環境構築およびセキュリティ
対策を実施した場合と比較し、サーバ集約にて約 48% のコ
スト低減を実現した(第 5 図)。
18台
80台
+0.08
セキュリティ対策
(5)
災害対策環境
1.00
(基準)
サーバ集約スケジュール
当初のサーバ集約スケジュールは、サーバの定期更新計
分散設置
1.00
(基準)
画を踏襲した 9 年で計画していた。サーバ集約を進める過
程で蓄積したノウハウや技術向上などにより移行作業を
集約前
効率的に進めることで、スケジュール(もしくは計画)を
34% 削減した。
2017
2018
2019
2020
2021
2022
2023
2024
2025
2026
前倒し
移行
前倒し
移行
移行
移行
4
まとめ
を実現し、高度なシステム管理・運営体制を確立した。今
前倒し
移行
集約後
理化」とともに、スマートメーターシステムとの一体運用
20kV級配電線用サーバ
開発・試験
拠点集約
0.72
サーバ集約により、「高信頼性確保」と「保守運用の合
給制システム連係用サーバ
開発・試験
セキュリティ対策
0.04
2027
支社間連係用サーバ
開発・試験
災害対策環境
0.32
第 5 図 コスト低減の実績
約 3 年半前倒しの約 5 年半でサーバ集約を実現した(第 3
図)。これにより、当初の計画からランニングコストを約
48%の
コスト削減
移行
移行
後も、安定かつ効率的な運用ならびに、様々な環境変化に
対応していく。
配電自動化メインサーバ
前倒し
開発・試験
移行
災害対策環境
開発・試験
第 3 図 サーバ集約スケジュール
移行
参考文献
1) https://www.ipa.go.jp/archive/digital/iot-en-ci/jyouryuu/hikinou/
ent03-b.html
技術開発ニュース 2025.03/No.169
58
�
- ▲TOP
- ページ: 59
-
研 究 成 果
Results of Research Activities
高効率・高出力アルミ反射ヒータの開発
Development of High-efficiency, High-power Aluminum Reflective Heaters
高出力でも溶けない汎用的な反射筐体
執筆者
これまで中部電力ミライズは、脱炭素社会を実現するため、製造業のお客さまに対して
CO2 を多く排出する加熱工程での高効率な電化を実現してきた。このたび、片面加熱プ
ロセスに適用できるよう、加熱効率を徹底的に追求しつつ、ガス燃焼の代替になるレベル
まで出力を上げても故障しないヒータユニットを開発した。
中部電力ミライズ
法人営業本部ソリューションセンター
村田 昂平
1
2
背景および目的
今日、2050 年のカーボンニュートラル実現や安全、工
開発概要
(1) 課題抽出
程のオートメーション化といった観点より、製造業のお客
既製品が高出力化できない要因として、以下 2 点が挙げ
さまでガス加熱からの電化が求められている。このニーズ
られる。
に対して,中部電力ミライズは要素電気加熱技術を用いた
① 反射される光が焦点に集光される
革新的な加熱装置の開発に取り組んできた。
② 放熱性能が不足している
一つの開発事例として、ア
①については、第 3 図(a)光シミュレーション結果よ
ルミ低圧鋳造の金型予熱に
り確認できるように、焦点距離付近で光が集光している。
てガスバーナ式から赤外線
一方で焦点距離から離れた場合光が散乱してしまい加熱効
式 に 置 き 換 え を 実 現 す る、
率が著しく低下する。そのため、高効率に加熱を行うため
300kW/m2 というガス燃焼
にはヒータとワークの距離を近づける必要があり、その結
と同等程度の加熱能力を持っ
第 1 図 赤外線式金型加熱器
た加熱装置を開発している。
果ワークからの反射熱で筐体自身の温度が上昇してしまう
という課題があった。
この金型加熱装置は多くの企業、工場さまの金型予熱工
程へ横展開されているが、上型と下型への両方向加熱を目
的とした装置である。しかし、製造業の加熱プロセスとし
ては熱源から見て片面を加熱する工程が大半を占めている。
電気ヒータは全方位に光を照射するため、片面加熱の場
合赤外線に指向性を持たせる必要がある。そこでミライ
ズではヒータ 1 本ごとにアルミ製の反射板を取り付けた既
製品の片面高効率ヒータを用いて片面加熱プロセスの電化
検討を行ってきたが、既製品ではアルミ反射板の耐熱温度
の制約より、高出力化が難しく、ガスからの転換の障壁と
なっていた。そこで今回、赤外線加熱装置と同等の片面
150kW/m2 という高出力かつ、既製品よりも優れた加熱
(a)既製品 (b)開発品
第 3 図 光シミュレーション結果
効率 60% を実現する片面加熱装置を開発した。
片面 150kW/m2 の高出力を達成するため、第 4 図に示
すような高出力に耐えられるアルミ反射筐体として反射面
および放熱面の設計・開発を行った。
第 2 図 開発目標(出力・効率)
59
技術開発ニュース 2025.03/No.169
第 4 図 開発品
�
- ▲TOP
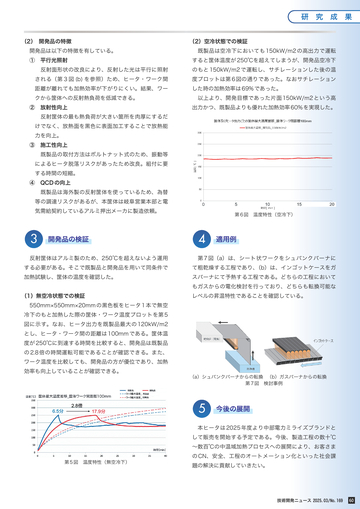
- ページ: 60
-
研 究 成 果
(2) 開発品の特徴
開発品は以下の特徴を有している。
① 平行光照射
(2)空冷状態での検証
既製品は空冷下においても 150kW/m2 の高出力で運転
すると筐体温度が 250℃を超えてしまうが、開発品空冷下
反射面形状の改良により、反射した光は平行に照射
のもと 150kW/m2 で運転し、サチレーションした後の温
される(第3図 (b) を参照)ため、ヒータ・ワーク間
度プロットは第 6 図の通りであった。なおサチレーション
距離が離れても加熱効率が下がりにくい。結果、ワー
した時の加熱効率は 69% であった。
クから筐体への反射熱負荷を低減できる。
以上より、開発目標であった片面 150kW/m2 という高
② 放射性向上
出力かつ、既製品よりも優れた加熱効率 60% を実現した。
反射筐体の最も熱負荷が大きい箇所を肉厚にするだ
けでなく、放熱面を黒色に表面加工することで放熱能
力を向上。
③ 施工性向上
既製品の取付方法はボルトナット式のため、振動等
によるヒータ脱落リスクがあったため改良。組付に要
する時間の短縮。
④ QCD の向上
既製品は海外製の反射筐体を使っているため、為替
等の調達リスクがあるが、本筐体は岐阜営業本部と電
気需給契約しているアルミ押出メーカに製造依頼。
3
開発品の検証
第 6 図 温度特性(空冷下)
4
適用例
反射筐体はアルミ製のため、250℃を超えないよう運用
第 7 図(a)は、シート状ワークをシュバンクバーナに
する必要がある。そこで既製品と開発品を用いて同条件で
て粗乾燥する工程であり、(b)は、インゴットケースをガ
加熱試験し、筐体の温度を確認した。
スバーナにて予熱する工程である。どちらの工程において
もガスからの電化検討を行っており、どちらも転換可能な
(1)無空冷状態での検証
レベルの昇温特性であることを確認している。
550mm×550mm×20mm の黒色板をヒータ 1 本で無空
冷下のもと加熱した際の筐体・ワーク温度プロットを第 5
図に示す。なお、ヒータ出力を既製品最大の 120kW/m2
とし、ヒータ・ワーク間の距離は 100mm である。筐体温
度が 250℃に到達する時間を比較すると、開発品は既製品
の 2.8 倍の時間運転可能であることが確認できる。また、
ワーク温度を比較しても、開発品の方が優位であり、加熱
効率も向上していることが確認できる。
(a)シュバンクバーナからの転換 (b)ガスバーナからの転換
第 7 図 検討事例
5
今後の展開
本ヒータは 2025 年度より中部電力ミライズブランドと
して販売を開始する予定である。今後、製造工程の数十℃
~数百℃の中温域加熱プロセスへの展開により、お客さま
第 5 図 温度特性(無空冷下)
の CN、安全、工程のオートメーション化といった社会課
題の解決に貢献していきたい。
技術開発ニュース 2025.03/No.169
60
�
- ▲TOP
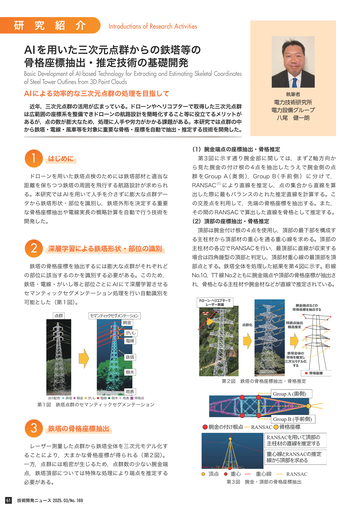
- ページ: 61
-
研 究 紹 介
Introductions of Research Activities
AI を用いた三次元点群からの鉄塔等の
骨格座標抽出・推定技術の基礎開発
Basic Development of AI-based Technology for Extracting and Estimating Skeletal Coordinates
of Steel Tower Outlines from 3D Point Clouds
AI による効率的な三次元点群の処理を目指して
執筆者
近年,三次元点群の活用が広まっている。ドローンやヘリコプターで取得した三次元点群
は広範囲の座標系を整備できドローンの航路設計を簡略化すること等に役立てるメリットが
あるが,点の数が膨大なため,処理に人手や労力がかかる課題がある。本研究では点群の中
から鉄塔・電線・風車等を対象に重要な骨格・座標を自動で抽出・推定する技術を開発した。
電力技術研究所
電力設備グループ
八尾 健一朗
1
はじめに
(1)腕金端点の座標抽出・骨格推定
第 3 図に示す通り腕金部に関しては,まず Z 軸方向か
ら見た腕金の付け根の 4 点を抽出したうえで腕金側の点
ドローンを用いた鉄塔点検のためには鉄塔部材と適当な
群 を Group A( 奥 側 ),Group B( 手 前 側 ) に 分 け て,
距離を保ちつつ鉄塔の周囲を飛行する航路設計が求められ
RANSAC(1) により直線を推定し,点の集合から直線を算
る。本研究では AI を用いて人手を介さずに膨大な点群デー
出した際に最もバランスのとれた推定直線を計算する。こ
タから鉄塔形状・部位を識別し,鉄塔外形を決定する重要
の交差点を利用して,先端の骨格座標を抽出する。また,
な骨格座標抽出や電線実長の概略計算を自動で行う技術を
その間の RANSAC で算出した直線を骨格として推定する。
開発した。
(2)頂部の座標抽出・骨格推定
頂部は腕金付け根の4 点を使用し,頂部の最下部を構成す
2
深層学習による鉄塔形状・部位の識別
る主柱材から頂部材の重心を通る重心線を求める。頂部の
主柱材の各辺でRANSACを行い,最頂部に直線が収束する
場合は四角錘型の頂部と判定し,頂部材重心線の最頂部を頂
鉄塔の骨格座標を抽出するには膨大な点群がそれぞれど
部点とする。鉄塔全体を処理した結果を第 4図に示す。IB線
の部位に該当するのかを識別する必要がある。このため,
No.10,TT 線No.2ともに腕金端点や頂部の骨格座標が抽出さ
鉄塔・電線・がいし等と部位ごとに AI にて深層学習させる
れ,骨格となる主柱材や腕金材などが直線で推定されている。
セマンティックセグメンテーション処理を行い自動識別を
可能とした(第 1 図)。
第 2 図 鉄塔の骨格座標抽出・骨格推定
第 1 図 鉄塔点群のセマンティックセグメンテーション
3
鉄塔の骨格座標抽出
レーザー測量した点群から鉄塔全体を三次元モデル化す
ることにより,大まかな骨格座標が得られる(第 2 図)。
一方,点群には粗密が生じるため,点群数の少ない腕金端
点,鉄塔頂部については特殊な処理により端点を推定する
必要がある。
61
技術開発ニュース 2025.03/No.169
第 3 図 腕金・頂部の骨格座標抽出
�
- ▲TOP
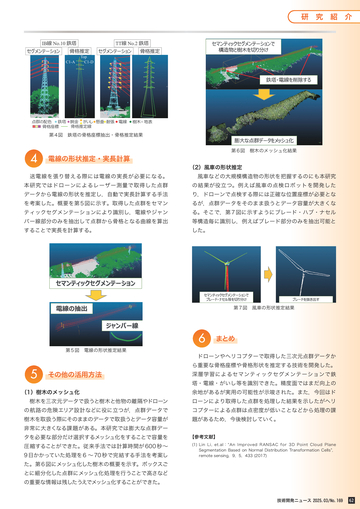
- ページ: 62
-
研 究 紹 介
第 4 図 鉄塔の骨格座標抽出・骨格推定結果
4
電線の形状推定・実長計算
送電線を張り替える際には電線の実長が必要になる。
第 6 図 樹木のメッシュ化結果
(2)風車の形状推定
風車などの大規模構造物の形状を把握するのにも本研究
本研究ではドローンによるレーザー測量で取得した点群
の結果が役立つ。例えば風車の点検ロボットを開発した
データから電線の形状を推定し,自動で実長計算する手法
り,ドローンで点検する際には正確な位置座標が必要とな
を考案した。概要を第 5 図に示す。取得した点群をセマン
るが,点群データをそのまま扱うとデータ容量が大きくな
ティックセグメンテーションにより識別し,電線やジャン
る。そこで,第 7 図に示すようにブレード・ハブ・ナセル
パー線部分のみを抽出して点群から骨格となる曲線を算出
等構造毎に識別し,例えばブレード部分のみを抽出可能と
することで実長を計算する。
した。
第 7 図 風車の形状推定結果
6
第 5 図 電線の形状推定結果
5
その他の活用方法
(1)樹木のメッシュ化
まとめ
ドローンやヘリコプターで取得した三次元点群データか
ら重要な骨格座標や骨格形状を推定する技術を開発した。
深層学習によるセマンティックセグメンテーションで鉄
塔・電線・がいし等を識別できた。精度面ではまだ向上の
余地があるが実用の可能性が示唆された。また,今回はド
樹木を三次元データで扱うと樹木と他物の離隔やドローン
ローンにより取得した点群を処理した結果を示したがヘリ
の航路の危険エリア設計などに役に立つが,点群データで
コプターによる点群は点密度が低いことなどから処理の課
樹木を取扱う際にそのままのデータで取扱うとデータ容量が
題があるため,今後検討していく。
非常に大きくなる課題がある。本研究では膨大な点群デー
タを必要な部分だけ選択するメッシュ化をすることで容量を
圧縮することができた。従来手法では計算時間が 600 秒~
9 日かかっていた処理を 6 ~ 70 秒で完結する手法を考案し
【参考文献】
(1) Lin Li, et.al:“An Improved RANSAC for 3D Point Cloud Plane
Segmentation Based on Normal Distribution Transformation Cells”,
remote sensing,9,5,433 (2017)
た。第 6 図にメッシュ化した樹木の概要を示す。ボックスご
とに細分化した点群にメッシュ化処理を行うことで高さなど
の重要な情報は残したうえでメッシュ化することができた。
技術開発ニュース 2025.03/No.169
62
�
- ▲TOP
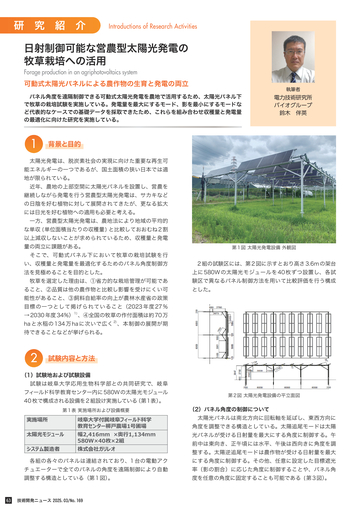
- ページ: 63
-
研 究 紹 介
Introductions of Research Activities
日射制御可能な営農型太陽光発電の
牧草栽培への活用
Forage production in an agriphotovoltaics system
可動式太陽光パネルによる農作物の生育と発電の両立
パネル角度を遠隔制御できる可動式太陽光発電を農地で活用するため、太陽光パネル下
で牧草の栽培試験を実施している。発電量を最大にするモード、影を最小にするモードな
ど代表的なケースでの基礎データを採取できたため、これらを組み合わせ収穫量と発電量
の最適化に向けた研究を実施している。
執筆者
電力技術研究所
バイオグループ
鈴木 伴英
1
背景と目的
太陽光発電は、脱炭素社会の実現に向けた重要な再生可
能エネルギーの一つであるが、国土面積の狭い日本では適
地が限られている。
近年、農地の上部空間に太陽光パネルを設置し、営農を
継続しながら発電を行う営農型太陽光発電は、サカキなど
の日陰を好む植物に対して展開されてきたが、更なる拡大
には日光を好む植物への適用も必要と考える。
一方、営農型太陽光発電は、農地法により地域の平均的
な単収 ( 単位面積当たりの収穫量 ) と比較しておおむね 2 割
以上減収しないことが求められているため、収穫量と発電
量の両立に課題がある。
そこで、可動式パネル下において牧草の栽培試験を行
第 1 図 太陽光発電設備 外観図
い、収穫量と発電量を最適化するためのパネル角度制御方
2 組の試験区には、第 2 図に示すとおり高さ 3.6m の架台
牧草を選定した理由は、①省力的な栽培管理が可能であ
験区で異なるパネル制御方法を用いて比較評価を行う構成
法を見極めることを目的とした。
ること、②品質は他の農作物と比較し影響を受けにくい可
能性があること、③飼料自給率の向上が農林水産省の政策
上に 580W の太陽光モジュールを 40 枚ずつ設置し、各試
とした。
目標の一つとして掲げられていること(2023 年度 27%
→ 2030 年度 34%)1)、④全国の牧草の作付面積は約 70 万
ha と水稲の 134 万 ha に次いで広く 2)、本制御の展開が期
待できることなどが挙げられる。
2
試験内容と方法
(1)試験地および試験設備
試 験は岐阜大学応用生物科学部との共同研究で、岐阜
フィールド科学教育センター内に580Wの太陽光モジュール
40 枚で構成される設備を2 組設け実施している(第1表)。
第 1 表 実施場所および設備概要
(2)パネル角度の制御について
太陽光パネルは南北方向に回転軸を延ばし、東西方向に
実施場所
岐阜大学付属岐阜フィールド科学
教育センター柳戸農場1号圃場
太陽光モジュール
幅2,416mm ×奥行1,134mm
580W×40枚×2組
光パネルが受ける日射量を最大にする角度に制御する。午
システム製造者
株式会社ガリレオ
整する。太陽逆追尾モードは農作物が受ける日射量を最大
各組の各々のパネルは連結されており、1 台の電動アク
チュエーターで全てのパネルの角度を遠隔制御により自動
調整する構造としている(第 1 図)。
63
第 2 図 太陽光発電設備の平立面図
技術開発ニュース 2025.03/No.169
角度を調整できる構造としている。太陽追尾モードは太陽
前中は東向き、正午頃には水平、午後は西向きに角度を調
にする角度に制御する。その他、任意に設定した目標遮光
率(影の割合)に応じた角度に制御することや、パネル角
度を任意の角度に固定することも可能である ( 第 3 図)。
�
- ▲TOP
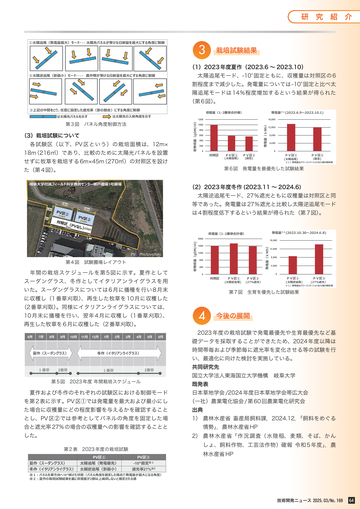
- ページ: 64
-
研 究 紹 介
①太陽追尾(発電量最大)モード・・・ 太陽光パネルが受ける日射量を最大にする角度に制御
3
栽培試験結果
(1)2023 年度夏作(2023.6 ~ 2023.10)
太陽追尾モード、-10° 固定ともに、収穫量は対照区の 6
②太陽逆追尾(影最小)モード・・・・ 農作物が受ける日射量を最大にする角度に制御
割程度まで減少した。発電量については -10° 固定と比べ太
陽追尾モードは 14%程度増加するという結果が得られた
(第 6 図)。
③上記の中間をとり、任意に設定した遮光率(影の割合)にする角度に制御
収穫量(1・2番草合計値)
(3)栽培試験について
各試験区(以下、PV 区という)の栽培面積は、12m×
18m(216㎡)であり、比較のために太陽光パネルを設置
16,000
1000
800
600
400
200
12,000
8,000
4,000
0
0
対照区
せずに牧草を栽培する 6m×45m(270㎡)の対照区を設け
PV区①
(太陽追尾)
PV区②
PV区①
(固定)
(太陽追尾)
PV区②
(固定)
※1)発電量はパワーコンディショナ出力値の積算値
第 6 図 発電量を最優先した試験結果
た(第 4 図)。
岐阜大学付属フィールド科学教育センター柳戸農場1号圃場
発電量※1(2023.6.9~2023.10.1)
1200
発電量(kWh)
第 3 図 パネル角度制御方法
乾物収量(gDM/㎡)
は太陽光の入射角度を示す
は太陽光パネルを示す
(2)2023 年度冬作 (2023.11 ~ 2024.6)
太陽逆追尾モード、27%遮光ともに収穫量は対照区と同
等であった。発電量は 27%遮光と比較し太陽逆追尾モード
は 4 割程度低下するという結果が得られた(第 7 図)。
発電量※1(2023.10.30~2024.6.8)
収穫量(1・2番草合計値)
第 4 図 試験圃場レイアウト
年間の栽培スケジュールを第 5 図に示す。夏作として
16,000
1600
発電量(kWh)
PV: Photovoltaic
乾物収量(gDM/㎡)
2000
1200
800
400
対照区
いた。スーダングラスについては 6 月に播種を行い 8 月末
10 月末に播種を行い、翌年 4 月に収穫し(1 番草刈取)、
再生した牧草を 6 月に収穫した(2 番草刈取)。
6月
7月
8月
9月
10月
夏作(スーダングラス)
1番草
2番草
11月
12月
1月
2月
3月
4月
5月
6月
PV区①
(太陽逆追尾)
PV区②
(27%遮光)
PV区①
(太陽逆追尾)
PV区②
(27%遮光)
※1)発電量はパワーコンディショナ出力値の積算値
4
今後の展開
2023 年度の栽培試験で発電最優先や生育最優先など基
礎データを採取することができたため、2024 年度以降は
時間帯毎および季節毎に遮光率を変化させる等の試験を行
冬作(イタリアンライグラス)
い、最適化に向けた検討を実施している。
2番草
1番草
4,000
第 7 図 生育を優先した試験結果
に収穫し(1 番草刈取)、再生した牧草を 10 月に収穫した
(2 番草刈取)。同様にイタリアンライグラスについては、
8,000
0
0
スーダングラス、冬作としてイタリアンライグラスを用
12,000
第 5 図 2023 年度 年間栽培スケジュール
夏作および冬作のそれぞれの試験区における制御モード
を第 2 表に示す。PV 区①では発電量を最大および最小にし
た場合に収穫量にどの程度影響を与えるかを確認すること
とし、PV 区②では参考としてパネルの角度を固定した場
合と遮光率 27% の場合の収穫量への影響を確認することと
した。
共同研究先
国立大学法人東海国立大学機構 岐阜大学
既発表
日本草地学会 /2024 年度日本草地学会帯広大会
(一社)農業電化協会 / 第 60 回農業電化研究会
出典
1) 農林水産省 畜産局飼料課,2024.12,「飼料をめぐる
情勢」,農林水産省 HP
2) 農林水産省「作況調査(水陸稲、麦類、そば、かん
しょ、飼料作物、工芸法作物)確報 令和 5 年度」,農
第 2 表 2023 年度の栽培試験
PV区①
PV区②
夏作(スーダングラス)
太陽追尾(発電優先)
-10°固定※1
冬作(イタリアンライグラス)
太陽逆追尾(影最小)
遮光率27%※2
林水産省 HP
※1︓パネルを東方向へ10°傾けた状態(パネル角度を固定した場合で発電量が最大になる角度)
※2︓夏作の栽培試験結果を基に収穫量が2割以上減収しないと推定される値
技術開発ニュース 2025.03/No.169
64
�
- ▲TOP
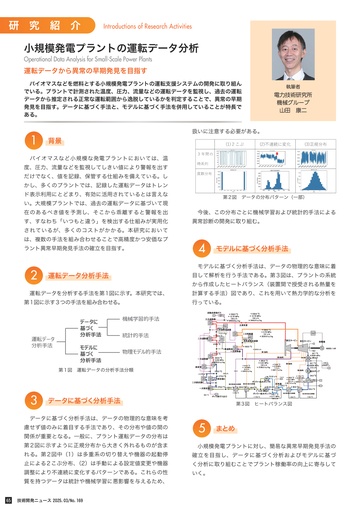
- ページ: 65
-
研 究 紹 介
Introductions of Research Activities
小規模発電プラントの運転データ分析
Operational Data Analysis for Small-Scale Power Plants
運転データから異常の早期発見を目指す
バイオマスなどを燃料とする小規模発電プラントの運転支援システムの開発に取り組ん
でいる。プラントで計測された温度、圧力、流量などの運転データを監視し、過去の運転
データから推定される正常な運転範囲から逸脱しているかを判定することで、異常の早期
発見を目指す。データに基づく手法と、モデルに基づく手法を併用していることが特長で
ある。
執筆者
電力技術研究所
機械グループ
山田 康二
1
扱いに注意する必要がある。
背景
(1)2こぶ
バイオマスなど小規模な発電プラントにおいては、温
度、圧力、流量などを監視してしきい値により警報を出す
だけでなく、値を記録、保管する仕組みを備えている。し
(2)不連続に変化
(3)正規分布
3年間の
時系列
度数分布
かし、多くのプラントでは、記録した運転データはトレン
ド表示利用にとどまり、有効に活用されているとは言えな
第 2 図 データの分布パターン(一部)
い。大規模プラントでは、過去の運転データに基づいて現
在のあるべき値を予測し、そこから乖離すると警報を出
今後、この分布ごとに機械学習および統計的手法による
す、すなわち「いつもと違う」を検出する仕組みが実用化
異常診断の開発に取り組む。
されているが、多くのコストがかかる。本研究において
は、複数の手法を組み合わせることで高精度かつ安価なプ
ラント異常早期発見手法の確立を目指す。
2
4
モデルに基づく分析手法
モデルに基づく分析手法は、データの物理的な意味に着
運転データ分析手法
目して解析を行う手法である。第 3 図は、プラントの系統
から作成したヒートバランス(装置間で授受される熱量を
運転データを分析する手法を第1図に示す。本研究では、
計算する手法)図であり、これを用いて熱力学的な分析を
第1図に示す 3 つの手法を組み合わせる。
行っている。
運転データ
分析手法
データに
基づく
分析手法
モデルに
基づく
分析手法
機械学習的手法
統計的手法
物理モデル的手法
第 1 図 運転データの分析手法分類
3
データに基づく分析手法
データに基づく分析手法は、データの物理的な意味を考
慮せず値のみに着目する手法であり、その分布や値の間の
関係が重要となる。一般に、プラント運転データの分布は
第 2 図に示すように正規分布から大きく外れるものが含ま
れる。第 2 図中(1)は多重系の切り替えや機器の起動停
止による 2 こぶ分布、(2)は手動による設定値変更や機器
調整により不連続に変化するパターンである。これらの性
質を持つデータは統計や機械学習に悪影響を与えるため、
65
技術開発ニュース 2025.03/No.169
第 3 図 ヒートバランス図
5
まとめ
小規模発電プラントに対し、簡易な異常早期発見手法の
確立を目指し、データに基づく分析およびモデルに基づ
く分析に取り組むことでプラント稼働率の向上に寄与して
いく。
�
- ▲TOP
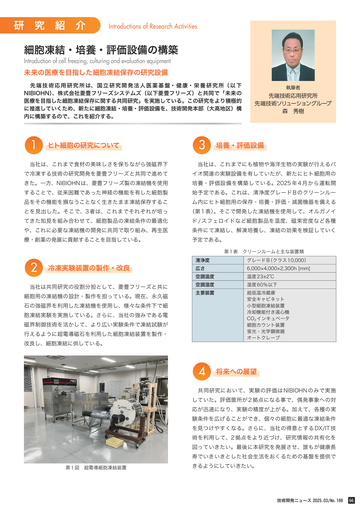
- ページ: 66
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
細胞凍結・培養・評価設備の構築
Introduction of cell freezing, culturing and evaluation equipment
未来の医療を目指した細胞凍結保存の研究設備
先 端 技 術 応 用 研 究 所 は、 国 立 研 究 開 発 法 人 医 薬 基 盤・ 健 康・ 栄 養 研 究 所( 以 下
NIBIOHN)、株式会社菱豊フリーズシステムズ(以下菱豊フリーズ)と共同で「未来の
医療を目指した細胞凍結保存に関する共同研究」を実施している。この研究をより積極的
に推進していくため、新たに細胞凍結・培養・評価設備を、技術開発本部(大高地区)構
内に構築するので、これを紹介する。
執筆者
先端技術応用研究所
先端技術ソリューショングループ
森 秀樹
1
ヒト細胞の研究について
3
培養・評価設備
当社は、これまで食材の美味しさを保ちながら強磁界下
当社は、これまでにも植物や海洋生物の実験が行えるバ
で冷凍する技術の研究開発を菱豊フリーズと共同で進めて
イオ関連の実験設備を有していたが、新たにヒト細胞用の
きた。一方、NIBIOHN は、菱豊フリーズ製の凍結機を使用
培養・評価設備を構築している。2025 年 4 月から運転開
することで、従来困難であった神経の機能を有した細胞製
始予定である。これは、清浄度グレード B のクリーンルー
品をその機能を損なうことなく生きたまま凍結保存するこ
ム内にヒト細胞用の保存・培養・評価・滅菌機器を備える
とを見出した。そこで、3 者は、これまでそれぞれが培っ
(第 1 表)。そこで開発した凍結機を使用して、オルガノイ
てきた知見を組み合わせて、細胞製品の凍結条件の最適化
ド / スフェロイドなど細胞製品を温度、磁束密度など各種
や、これに必要な凍結機の開発に共同で取り組み、再生医
条件にて凍結し、解凍培養し、凍結の効果を検証していく
療・創薬の発展に貢献することを目指している。
予定である。
第 1 表 クリーンルームと主な装置類
2
冷凍実験装置の製作・改良
当社は共同研究の役割分担として、菱豊フリーズと共に
細胞用の凍結機の設計・製作を担っている。現在、永久磁
清浄度
広さ
空調温度
空調湿度
主要装置
石の強磁界を利用した凍結機を使用し、様々な条件下で細
胞凍結実験を実施している。さらに、当社の強みである電
磁界制御技術を活かして、より広い実験条件で凍結試験が
行えるように超電導磁石を利用した細胞凍結装置を製作・
改良し、細胞凍結に供している。
4
グレード B(クラス 10,000)
6,000×4,000×2,300h [mm]
温度 23±2℃
湿度 60%以下
超低温冷蔵庫
安全キャビネット
小型細胞凍結装置
冷却機能付き遠心機
CO2 インキュベータ
細胞カウント装置
蛍光・光学顕微鏡
オートクレーブ
将来への展望
共同研究において、実験の評価は NIBIOHN のみで実施
していた。評価箇所が 2 拠点になる事で、偶発事象への対
応が迅速になり、実験の精度が上がる。加えて、各種の実
験条件を広げることができ、個々の細胞に最適な凍結条件
を見つけやすくなる。さらに、当社の得意とする DX/IT 技
術を利用して、2 拠点をより近づけ、研究情報の共有化を
図っていきたい。最後に本研究を発展させ、誰もが健康長
寿でいきいきとした社会生活をおくるための基盤を提供で
第 1 図 超電導細胞凍結装置
きるようにしていきたい。
技術開発ニュース 2025.03/No.169
66
�
- ▲TOP
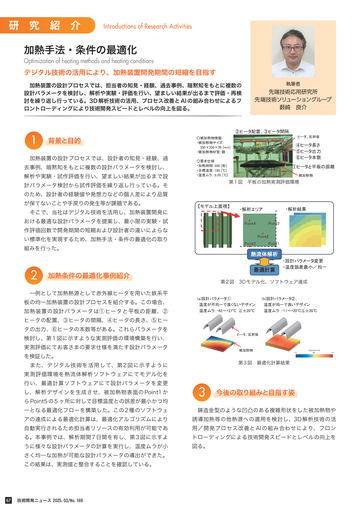
- ページ: 67
-
研 究 紹 介
Introductions of Research Activities
加熱手法・条件の最適化
Optimization of heating methods and heating conditions
デジタル技術の活用により、加熱装置開発期間の短縮を目指す
執筆者
加熱装置の設計プロセスでは、担当者の知見・経験、過去事例、暗黙知をもとに複数の
設計パラメータを検討し、解析や実験・評価を行い、望ましい結果が出るまで評価・再検
討を繰り返し行っている。3D 解析技術の活用、プロセス改善と AI の組み合わせによるフ
ロントローディングにより技術開発スピードとレベルの向上を図る。
先端技術応用研究所
先端技術ソリューショングループ
薮崎 良介
1
②ヒータ配置、③ヒータ間隔
背景と目的
加熱装置の設計プロセスでは、設計者の知見・経験、過
去事例、暗黙知をもとに複数の設計パラメータを検討し、
解析や実験・試作評価を行い、望ましい結果が出るまで設
ヒータ、反射板
○被加熱物情報
・被加熱物サイズ:
350×350×20 [mm]
・被加熱物材質:鉄
④ヒータ長さ
⑤ヒータ出力
⑥ヒータ本数
○要求仕様
・加熱時間:300 [秒]
・目標温度:180 [℃]
・温度ムラ:±20 [℃]
①ヒータと平板の距離
被加熱物
第 1 図 平板の加熱実測評価環境
計パラメータ検討から試作評価を繰り返し行っている。そ
のため、設計者の経験値や発想力などの個人差により品質
が保てないことや手戻りの発生等が課題である。
そこで、当社はデジタル技術を活用し、加熱装置開発に
【モデル上面視】
おける最適な設計パラメータを提案し、最小限の実験・試
・解析結果
・解析エリア
Point5
Point4
作評価回数で開発期間の短縮および設計者の違いによらな
い標準化を実現するため、加熱手法・条件の最適化の取り
Point2
Point3
組みを行った。
2
熱流体解析
最適計算
加熱条件の最適化事例紹介
一例として加熱熱源として赤外線ヒータを用いた鉄系平
板の均一加熱装置の設計プロセスを紹介する。この場合、
加熱装置の設計パラメータは①ヒータと平板の距離、②
Point1
・設計パラメータ変更
・温度誤差最小/均一
第 2 図 3D モデル化、ソフトウェア連成
(a)設計パラメータ①:
温度が不均一で良くないデザイン
温度ムラ:-42~+27℃ ≧±20℃
(b)設計パラメータ②:
温度が均一で良いデザイン
温度ムラ:-11~+20℃≦±20℃
ヒータの配置、③ヒータの間隔、④ヒータの長さ、⑤ヒー
タの出力、⑥ヒータの本数等がある。これらパラメータを
ヒータ、反射板
検討し、第 1 図に示すような実測評価の環境構築を行い、
実測評価にてお客さまの要求仕様を満たす設計パラメータ
被加熱物
を検証した。
第 3 図 最適化計算結果
また、デジタル技術を活用して、第 2 図に示すように
実測評価環境を熱流体解析ソフトウェアにてモデル化を
行い、最適計算ソフトウェアにて設計パラメータを変更
し、解析デザインを生成させ、被加熱物表面の Point1 か
ら Point5 の 5 ヶ所に対して目標温度との誤差が最小かつ均
今後の取り組みと目指す姿
一となる最適化フローを構築した。この 2 種のソフトウェ
鋳造金型のような凹凸のある複雑形状をした被加熱物や
アの連成による最適化計算は、最適化アルゴリズムにより
誘導加熱等の他熱源への適用を検討し、3D 解析技術の活
自動実行されるため担当者リソースの有効利用が可能であ
用/開発プロセス改善と AI の組み合わせにより、フロン
る。本事例では、解析期間 7 日間を有し、第 3 図に示すよ
トローディングによる技術開発スピードとレベルの向上を
うに様々な設計パラメータの計算を実行し、温度ムラが小
図る。
さく均一な加熱が可能な設計パラメータの導出ができた。
この結果は、実測値と整合することを確認している。
67
3
技術開発ニュース 2025.03/No.169
�
- ▲TOP
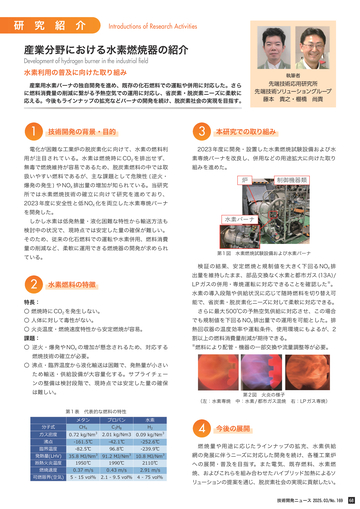
- ページ: 68
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
産業分野における水素燃焼器の紹介
Development of hydrogen burner in the industrial field
水素利用の普及に向けた取り組み
執筆者
産業用水素バーナの独自開発を進め、既存の化石燃料での運転や併用に対応した。さら
に燃料消費量の削減に繋がる予熱空気での運用に対応し、省炭素・脱炭素ニーズに柔軟に
応える。今後もラインナップの拡充などバーナの開発を続け、脱炭素社会の実現を目指す。
先端技術応用研究所
先端技術ソリューショングループ
藤本 貴之・棚橋 尚貴
1
3
技術開発の背景・目的
本研究での取り組み
電化が困難な工業炉の脱炭素化に向けて、水素の燃料利
2023 年度に開発・設置した水素燃焼試験設備および水
用が注目されている。水素は燃焼時に CO2 を排出せず、
素専焼バーナを改良し、併用などの用途拡大に向けた取り
無毒で燃焼維持が容易であるため、脱炭素燃料の中では取
組みを進めた。
扱いやすい燃料であるが、主な課題として危険性 ( 逆火・
炉
爆発の発生 ) や NOX 排出量の増加が知られている。当研究
制御機器類
所では水素燃焼技術の確立に向けて研究を進めており、
2023 年度に安全性と低 NOX 化を両立した水素専焼バーナ
を開発した。
水素バーナ
しかし水素は低発熱量・液化困難な特性から輸送方法も
検討中の状況で、現時点では安定した量の確保が難しい。
そのため、従来の化石燃料での運転や水素併用、燃料消費
量の削減など、柔軟に運用できる燃焼器の開発が求められ
第 1 図 水素燃焼試験設備および水素バーナ
ている。
検 証の結果、安定燃 焼と規制値を大きく下回る NOX 排
2
出量を維持したまま、部品交換なく水素と都市ガス(13A)/
水素燃料の特徴
LP ガスの併用・専焼運転に対応できることを確認した※。
水素の導入段階や供給状況に応じて随時燃料を切り替え可
特長:
能で、省炭素・脱炭素化ニーズに対して柔軟に対応できる。
〇 燃焼時に CO2 を発生しない。
さらに最大 500℃の予熱空気供給に対応させ、この場合
〇 火炎温度・燃焼速度特性から安定燃焼が容易。
熱回収器の温度効率や運転条件、使用環境にもよるが、2
課題:
割以上の燃料消費量削減が期待できる。
でも規制値を下回る NOX 排出量での運用を可能とした。排
〇 人体に対して毒性がない。
〇 逆火・爆発や NOX の増加が懸念されるため、対応する
燃料により配管・機器の一部交換や流量調整等が必要。
※
燃焼技術の確立が必要。
〇 沸点・臨界温度から液化輸送は困難で、発熱量が小さい
ため輸送・供給設備が大容量化する。サプライチェー
ンの整備は検討段階で、現時点では安定した量の確保
は難しい。
第 2 図 火炎の様子
(左:水素専焼 中:水素 / 都市ガス混焼 右:LP ガス専焼)
第 1 表 代表的な燃料の特性
メタン
プロパン
分子式
CH4
C3H8
H2
ガス密度
0.72 kg/Nm3
2.01 kg/Nm3
0.09 kg/Nm3
沸点
-161.5℃
-42.1℃
-252.6℃
臨界温度
-82.5℃
96.8℃
-239.9℃
発熱量(LHV)
断熱火炎温度
35.8 MJ/Nm
1950℃
3
91.2 MJ/Nm
1990℃
水素
3
燃焼速度
0.37 m/s
0.43 m/s
技術開発ニュース No.169/2025-3
可燃限界(空気) 5 - 15 vol% 2.1 - 9.5 vol%
10.8 MJ/Nm
2110℃
4
今後の展開
燃 焼 量や用途に応じたラインナップの拡 充、水素 供 給
3
2.91 m/s
4 - 75 vol%
網の発展に伴うニーズに対応した開発を続け、各種工業炉
への展 開・普及を目指す。 また電 気、 既 存燃料、 水素 燃
焼、およびこれらを組み合わせたハイブリッド加熱によるソ
リューションの提案を通じ、脱炭素社会の実現に貢献したい。
技術開発ニュース 2025.03/No.169
68
�
- ▲TOP
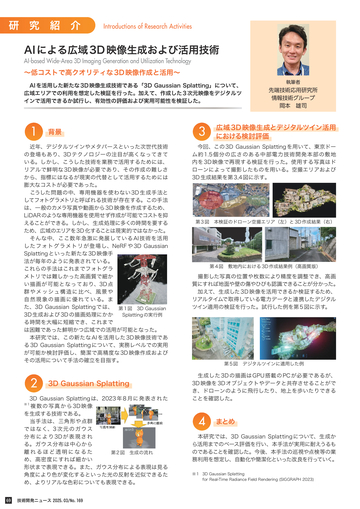
- ページ: 69
-
研 究 紹 介
Introductions of Research Activities
AI による広域 3D 映像生成および活用技術
AI-based Wide-Area 3D Imaging Generation and Utilization Technology
~低コストで高クオリティな 3D 映像作成と活用~
AI を活用した新たな 3D 映像生成技術である「3D Gaussian Splatting」について、
広域エリアでの利用を想定した検証を行った。加えて、作成した 3 次元映像をデジタルツ
インで活用できるか試行し、有効性の評価および実用可能性を検証した。
1
背景
近年、デジタルツインやメタバースといった次世代技術
の登場もあり、3D テクノロジーの注目が高くなってきて
いる。しかし、こうした技術を業務で活用するためには、
リアルで鮮明な 3D 映像が必要であり、その作成の難しさ
から、指標にはなるが現実の代替として活用するためには
膨大なコストが必要であった。
こうした問題の中、専用機器を使わない 3D 生成手法と
してフォトグラメトリと呼ばれる技術が存在する。この手法
は、一般のカメラ写真や動画から3D 映像を作成するため、
LiDARのような専用機器を使用せず作成が可能でコストを抑
えることができる。しかし、生成処理に多くの時間を要する
ため、広域のエリアを3D 化することは現実的ではなかった。
そんな中、ここ数年急激に発展している AI 技術を活用
したフォトグラメトリが登場し、NeRF や 3D Gaussian
Splatting といった新たな 3D 映像手
法が毎年のように発表されている。
これらの手法はこれまでフォトグラ
メトリでは難しかった高画質で細か
い描画が可能となっており、3D 点
群 や メ ッ シ ュ 構 造 に 比 べ、 風 景 や
自 然 現 象 の 描 画 に 優 れ て い る。 ま
た、3D Gaussian Splatting では、 第 1 図 3D Gaussian
3D 生成および 3D の描画処理にかか
Splatting の実行例
る時間を大幅に短縮でき、これまで
は困難であった鮮明かつ広域での活用が可能となった。
本研究では、この新たな AI を活用した 3D 映像技術であ
る 3D Gaussian Splatting について、実務レベルでの実用
が可能か検討評価し、簡潔で高精度な 3D 映像作成および
その活用について手法の確立を目指す。
2
3D Gaussian Splatting
3D Gaussian Splatting は、2023 年 8 月に発表された
※1
複 数 の 写 真 か ら 3D 映 像
を生成する技術である。
当手法は、三角形や点群
で は な く、3 次 元 の ガ ウ ス
分 布 に よ り 3D が 表 現 さ れ
る。ガウス分布は中心から
離れるほど透明になるた
第 2 図 生成の流れ
め、高密度にすれば細かい
形状まで表現できる。また、ガウス分布による表現は見る
角度により色が変化するといった光の反射を近似できるた
め、よりリアルな色彩についても表現できる。
69
技術開発ニュース 2025.03/No.169
3
執筆者
先端技術応用研究所
情報技術グループ
岡本 雄司
広域 3D 映像生成とデジタルツイン活用
における検討評価
今回、この 3D Gaussian Splatting を用いて、東京ドー
ム約 1.5 個分の広さのある中部電力技術開発本部の敷地
内を 3D 映像で再現する検証を行った。使用する写真はド
ローンによって撮影したものを用いる。空撮エリアおよび
3D 生成結果を第 3,4 図に示す。
第 3 図 本検証のドローン空撮エリア(左)と 3D 作成結果(右)
第 4 図 敷地内における 3D 作成結果例(高画質版)
撮影した写真の位置や枚数により精度を調整でき、高画
質にすれば地面や壁の傷やひびも認識できることが分かった。
加えて、生成した 3D 映像を活用できるか検証するため、
リアルタイムで取得している電力データと連携したデジタル
ツイン適用の検証を行った。試行した例を第 5 図に示す。
第 5 図 デジタルツインに適用した例
生成した 3D の描画は GPU 搭載の PC が必要であるが、
3D 映像を 3D オブジェクトやデータと共存させることがで
き、ドローンのように飛行したり、地上を歩いたりできる
ことを確認した。
4
まとめ
本研究では、3D Gaussian Splatting について、生成か
ら活用までのベース評価を行い、本手法が実用に耐えうるも
のであることを確認した。今後、本手法の巡視や点検等の業
務利用を想定し、自動化や簡潔化といった改良を行っていく。
※ 1 3D Gaussian Splatting
for Real-Time Radiance Field Rendering (SIGGRAPH 2023)
�
- ▲TOP
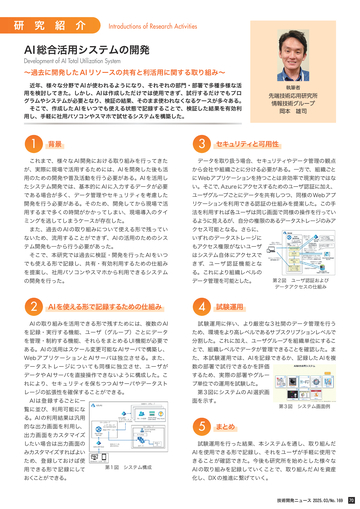
- ページ: 70
-
研 究 紹 介
研 究 紹 介
Introductions of Research Activities
AI 総合活用システムの開発
Development of AI Total Utilization System
~過去に開発した AI リソースの共有と利活用に関する取り組み~
近年、様々な分野で AI が使われるようになり、それぞれの部門・部署で多種多様な活
用を検討してきた。しかし、AI は作成しただけでは使用できず、試行するだけでもプロ
グラムやシステムが必要となり、検証の結果、そのまま使われなくなるケースが多々ある。
そこで、作成した AI をいつでも使える状態で記録することで、検証した結果を有効利
用し、手軽に社用パソコンやスマホで試せるシステムを構築した。
執筆者
先端技術応用研究所
情報技術グループ
岡本 雄司
1
3
背景
セキュリティと可用性
これまで、様々な AI 開発における取り組みを行ってきた
データを取り扱う場合、セキュリティやデータ管理の観点
用のための開発や普及活動を行う必要がある。AI を活用し
にWebアプリケーションを持つことは非効率で現実的ではな
が、実際に現場で活用するためには、AI を開発した後も活
たシステム開発では、基本的に AI に入力するデータが必要
である場合が多く、データ管理やセキュリティを考慮した
開発を行う必要がある。そのため、開発してから現場で活
用するまで多くの時間がかかってしまい、現場導入のタイ
ミングを逃してしまうケースが存在した。
また、過去の AI の取り組みについて使える形で残ってい
ないため、流用することができず、AI の活用のためのシス
テム開発も一から行う必要があった。
そこで、本研究では過去に検証・開発を行った AI をいつ
でも使える形で記録し、共有・有効利用するための仕組み
を提案し、社用パソコンやスマホから利用できるシステム
の開発を行った。
2
AIを使える形で記録するための仕組み
から会社や組織ごとに分ける必要がある。一方で、組織ごと
い。そこで、Azure にアクセスするためのユーザ認証に加え、
ユーザグループごとにデータを共有しつつ、同様のWebアプ
リケーションを利用できる認証の仕組みを提案した。この手
法を利用すれば各ユーザは同じ画面で同様の操作を行ってい
るように見えるが、自分の権限のあるデータストレージのみア
クセス可能となる。さらに、
いずれのデータストレージに
もアクセス権限がないユーザ
はシステム自体にアクセスで
きず、 ユーザ 認 証 機 能とな
る。これにより組織レベルの
データ管理を可能とした。
4
第 2 図 ユーザ認証および
データアクセスの仕組み
試験運用
AI の取り組みを活用できる形で残すためには、複数の AI
試験運用に伴い、より厳密な 3 社間のデータ管理を行う
を管理・制約する機能、それらをまとめる UI 機能が必要で
分割した。これに加え、ユーザグループを組織単位にするこ
を記録・実行する機能、ユーザ(グループ)ごとにデータ
ある。AI の活用はスケール変更可能な AI サーバで構築し、
Web アプリケーションと AI サーバは独立させる。また、
データストレージについても同様に独立させ、ユーザが
データや AI サーバを直接操作できないように構成した。こ
れにより、セキュリティを保ちつつ AI サーバやデータスト
レージの拡張性を確保することができる。
AI は登録するごとに一
覧に並び、利用可能にな
る。AI の利用結果は汎用
出力画面をカスタマイズ
数の部署で試行できるかを評価
するため、実際の部署やグルー
プ単位での運用を試験した。
第 3 図にシステムの AI 選択画
面を示す。
第 3 図 システム画面例
まとめ
AI を使用できる形で記録し、それをユーザが手軽に使用で
みカスタマイズすればよい
おくことができる。
た、本試験運用では、AIを記録できるか、記録した AIを複
試験運用を行った結果、本システムを通し、取り組んだ
したい場合は出力画面の
用できる形で記録にして
とで、組織レベルでデータが管理できることを確認した。ま
5
的な出力画面を利用し、
ため、登録しておけば使
ため、環境をより高レベルであるサブスクリプションレベルで
第 1 図 システム構成
きることが確認できた。今後も研究所を始めとした様々な
AI の取り組みを記録していくことで、取り組んだ AI を資産
化し、DX の推進に繋げていく。
技術開発ニュース 2025.03/No.169
70
�
- ▲TOP
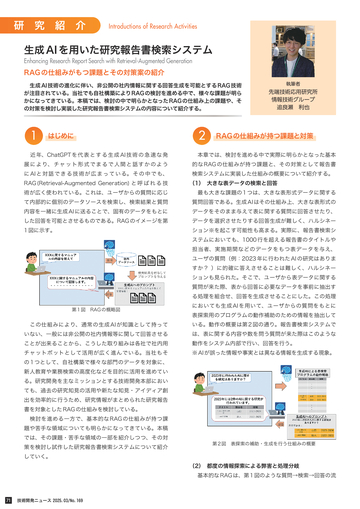
- ページ: 71
-
研 究 紹 介
Introductions of Research Activities
生成 AI を用いた研究報告書検索システム
Enhancing Research Report Search with Retrieval-Augmented Generation
RAG の仕組みがもつ課題とその対策案の紹介
生成 AI 技術の進化に伴い、非公開の社内情報に関する回答生成を可能とするRAG 技術
が注目されている。当社でも自社構築によりRAGの検討を進める中で、様々な課題が明ら
かになってきている。本稿では、検討の中で明らかとなったRAGの仕組み上の課題や、そ
の対策を検討し実装した研究報告書検索システムの内容について紹介する。
執筆者
先端技術応用研究所
情報技術グループ
追良瀬 利也
1
はじめに
2
RAG の仕組みが持つ課題と対策
近 年、ChatGPT を 代 表 と す る 生 成 AI 技 術 の 急 速 な 発
本章では、検討を進める中で実際に明らかとなった基本
展 に よ り、 チ ャ ッ ト 形 式 で ま る で 人 間 と 話 す か の よ う
的な RAG の仕組みが持つ課題と、その対策として報告書
に AI と 対 話 で き る 技 術 が 広 ま っ て い る。 そ の 中 で も、
検索システムに実装した仕組みの概要について紹介する。
RAG(Retrieval-Augmented Generation) と 呼 ば れ る 技
(1) 大きな表データの検索と回答
術が広く使われている。これは、ユーザからの質問に応じ
最も大きな課題の 1 つは、大きな表形式データに関する
て内部的に個別のデータソースを検索し、検索結果と質問
質問回答である。生成 AI はその仕組み上、大きな表形式の
内容を一緒に生成 AI に送ることで、固有のデータをもとに
データをそのまま与えて表に関する質問に回答させたり、
した回答を可能とさせるものである。RAG のイメージを第
データを選択させたりする回答生成が難しく、ハルシネー
1 図に示す。
ション※を起こす可能性も高まる。実際に、報告書検索シ
ステムにおいても、1000 行を超える報告書のタイトルや
担当者、実施期間などのデータをもつ表データを与え、
ユーザの質問(例:2023 年に行われた AI の研究はありま
すか? )に的確に答えさせることは難しく、ハルシネー
ションも見られた。そこで、ユーザから表データに関する
質問が来た際、表から回答に必要なデータを事前に抽出す
る処理を組合せ、回答を生成させることにした。この処理
第 1 図 RAG の概略図
においても生成 AI を用いて、ユーザからの質問をもとに
表探索用のプログラムの動作補助のための情報を抽出して
この仕組みにより、通常の生成 AI が知識として持って
いる。動作の概要は第 2 図の通り。報告書検索システムで
いない、一般には非公開の社内情報等に関して回答させる
は、表に関する内容や数を問う質問が来た際はこのような
ことが出来ることから、こうした取り組みは各社で社内用
動作をシステム内部で行い、回答を行う。
チャットボットとして活用が広く進んでいる。当社もそ
※ AI が誤った情報や事実とは異なる情報を生成する現象。
の 1 つとして、自社構築で様々な部門のデータを対象に、
新人教育や業務検索の高度化などを目的に活用を進めてい
る。研究開発を主なミッションとする技術開発本部におい
ても、過去の研究知見の活用や新たな知見・アイディア創
出を効率的に行うため、研究情報がまとめられた研究報告
書を対象とした RAG の仕組みを検討している。
検討を進める一方で、基本的な RAG の仕組みが持つ課
題や苦手な領域についても明らかになってきている。本稿
では、その課題・苦手な領域の一部を紹介しつつ、その対
策を検討し試作した研究報告書検索システムについて紹介
第 2 図 表探索の補助・生成を行う仕組みの概要
していく。
(2) 都度の情報探索による弊害と処理分岐
基本的な RAG は、第 1 図のような質問→検索→回答の流
71
技術開発ニュース 2025.03/No.169
�
- ▲TOP
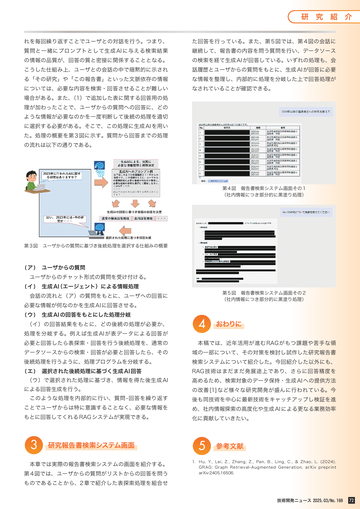
- ページ: 72
-
研 究 紹 介
れを毎回繰り返すことでユーザとの対話を行う。つまり、
た回答を行っている。また、第 5 図では、第 4 図の会話に
質問と一緒にプロンプトとして生成 AI に与える検索結果
継続して、報告書の内容を問う質問を行い、データソース
の情報の品質が、回答の質と密接に関係することとなる。
の検索を経て生成 AI が回答している。いずれの処理も、会
こうした仕組み上、ユーザとの会話の中で暗黙的に示され
話履歴とユーザからの質問をもとに、生成 AI が回答に必要
る「その研究」や「この報告書」といった文脈依存の情報
な情報を整理し、内部的に処理を分岐した上で回答処理が
については、必要な内容を検索・回答させることが難しい
なされていることが確認できる。
場合がある。また、(1)で追加した表に関する回答用の処
理が加わったことで、ユーザからの質問への回答に、どの
ような情報が必要なのかを一度判断して後続の処理を適切
に選択する必要がある。そこで、この処理に生成 AI を用い
た。処理の概要を第 3 図に示す。質問から回答までの処理
の流れは以下の通りである。
第 4 図 報告書検索システム画面その 1
(社内情報につき部分的に黒塗り処理)
第 3 図 ユーザからの質問に基づき後続処理を選択する仕組みの概要
( ア ) ユーザからの質問
ユーザからのチャット形式の質問を受け付ける。
( イ ) 生成 AI(エージェント)による情報処理
第 5 図 報告書検索システム画面その 2
(社内情報につき部分的に黒塗り処理)
会話の流れと(ア)の質問をもとに、ユーザへの回答に
必要な情報が何なのかを生成 AI に回答させる。
( ウ ) 生成 AI の回答をもとにした処理分岐
(イ)の回答結果をもとに、どの後続の処理が必要か、
処理を分岐する。例えば生成 AI が表データによる回答が
4
おわりに
必要と回答したら表探索・回答を行う後続処理を、通常の
本稿では、近年活用が進む RAG がもつ課題や苦手な領
データソースからの検索・回答が必要と回答したら、その
域の一部について、その対策を検討し試作した研究報告書
後続処理を行うように、処理プログラムを分岐する。
検索システムについて紹介した。今回紹介した以外にも、
( エ ) 選択された後続処理に基づく生成 AI 回答
RAG 技術はまだまだ発展途上であり、さらに回答精度を
(ウ)で選択された処理に基づき、情報を得た後生成 AI
による回答生成を行う。
このような処理を内部的に行い、質問 - 回答を繰り返す
ことでユーザからは特に意識することなく、必要な情報を
もとに回答してくれる RAG システムが実現できる。
3
研究報告書検索システム画面
本章では実際の報告書検索システムの画面を紹介する。
第 4 図では、ユーザからの質問がリストからの回答を問う
高めるため、検索対象のデータ保持・生成 AI への提供方法
の改善 [1] など様々な研究開発が盛んに行われている。今
後も同技術を中心に最新技術をキャッチアップし検証を進
め、社内情報探索の高度化や生成 AI による更なる業務効率
化に貢献していきたい。
5
参考文献
1. Hu, Y., Lei, Z., Zhang, Z., Pan, B., Ling, C., & Zhao, L. (2024).
GRAG: Graph Retrieval-Augmented Generation. arXiv preprint
arXiv:2405.16506.
ものであることから、2 章で紹介した表探索処理を組合せ
技術開発ニュース 2025.03/No.169
72
�
- ▲TOP
- ページ: 73
-
研 究 紹 介
Introductions of Research Activities
ダム監査廊内の保守業務を DX 化する
揚圧力遠隔計測システムの開発
Work improvement by development of lift pressure remote measurement system
現地出向することのない計測業務の実現
執筆者
高根第一ダムに、ダム内部通路内のローカル通信環境を整備し、水圧・水温計測ユニッ
ト、及び、水量計測ユニットを開発し、揚圧力計測システムを実現した。揚圧力計測シス
テムにより、遠隔地への出向及び急勾配、湿潤、狭隘といった現場での作業を排除した。
先端技術応用研究所
情報技術グループ
志水 洋
1
ダムの「立地」や「構造」や「環境」は変えられないた
ダム揚圧力計測業務
め、IoT を活用しながら、やり方を変えることで、安全確
保や作業改善にチャレンジした。
ダム揚圧力計測は、ダムの内部通路(以後は監査廊)で
浸透水の水圧、水温、水量を定期的に計測・監視する。ダ
ムの水は、浸透水として岩盤を経由し、ダムを持ち上げる
揚圧力として働く。これに起因する浸透水の水圧、水温、
2
自動化へのチャレンジ
水量を監視し、ダムの健全性を維持している。計測は、年
自動化の目標は、「ダムに現地出向することなく」計測
4 回、監査廊内の各ポイントにて行う。高根第一ダム ( 第 1
業務を実施することである。しかしながら、年 4 回と利用
図)を例にとると、監査廊は、深さが 133m、幅は 276m
頻度の低さから採算性も両立する必要があり、検討の結
あり、計測箇所は 76 箇所にも及ぶ。
果、内製を基本として開始した。開発には、「ダム内部通
●
路のローカル通信環境の整備」、「水圧・水温計測ユニット
監査廊
の開発」、「水量計測ユニットの開発」が必要であった。
計測ポイント(76箇所)
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●●
●●
●
●
●●●●●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
第 1 図 高根第一ダム
(1)ダム内部通路のローカル通信環境の整備
ダム管理事務所には、社内 LAN や制御 LAN の設備が用
意されていたが、開発当初は実験的な側面もあり、既存業
務への影響、回線延長のコスト、セキュリティといった面
を考慮し、LTE 回線を利用した。ダム管理事務所近辺は微
弱な電波が入るが、監査廊入口は圏外であった。LTE の利
ダム揚圧力計測業務は、車で遠隔地に出向し、急勾配で
用には、ダム管理事務所と監査廊入口の 300m の距離が壁
濡れた階段を徒歩で移動しながら、狭い作業スペースで中
となる。監査廊内部は、狭く曲がったトンネルのため、直
腰になり、水圧、水温、水量を計測する。( 第 2 図)
線的な見通しがきかず電波は届きづらい。
LTE 回線は、通信事業者 2 社の電波状況を比較し、かろ
うじて通信できる事業者を選定し、最適なアンテナ設置
場所を決定した。ダム管理事務所から監査廊入口までの
300m は、コストを抑えるため、有線 LAN ではなく、汎用
無線機で中継した。監査廊内部は、WiFi を仮設置し電波状
況を確認しながら、最少の台数の無線機の設置箇所を見出
した。これらの対応により、監査廊内で 1Mbps 程度の音
声通話が可能なレベルの通信品質を確保した。
(2)水圧・水温計測ユニットの開発
計測業務は、監査廊の中で温度計を用いた水温計測を行
う。圧力計測の前後には手動バルブ開閉を行う。また、圧
力計を用いて、計測値を記録する。現状は全ての作業を人
第 2 図 ダム揚圧力計測業務
73
技術開発ニュース 2025.03/No.169
手で行っているため、既設の装置は人手の利用を前提とし
�
- ▲TOP
- ページ: 74
-
研 究 紹 介
たものである。まずはこれらを、機械化方式のものに置き
換える必要があった。
容器の自作
流量計
手動バルブは、遠隔制御が可能で、機械的に開閉状態が
取得できる電動バルブに置き換えた。圧力計は、複数の
圧力センサを評価し、既存と同等以上の精度で機械に取り
込みが可能な圧力センサに置き換えた。温度計は、要件に
マッチした装置がないため、温度センサ素子を利用した装
置を自作した。( 第 3 図 )
現状方式
ハイブリッド流量計
雨量計
第 4 図 水量計測ユニットの開発
新方式
手動バルブ
電動バルブ
圧力計
圧力センサ
温度計
温度センサ
(4)揚圧力計測システム
最終的に出来上がった、揚圧力計測システムは、第 5 図
のような構成となる。これにより目標であった、現地出向
を完全になくすことができた。
水圧・水温計測ユニット
通信環境
電動バルブ
第 3 図 機械化方式の計測装置への置き換え
集約制御装置
LTEルータ
圧力センサ
温度センサ
これらの装置を組み合わせて、水圧・水温計測ユニット
を試作した。試作した計測ユニットを 1 年半かけて安定性
水量計測ユニット
を確認しながら、電気回路やソフトウェアを改良し、水圧
水温計測ユニットを実現した。水圧・水温計測ユニットの
開発により、現場作業時間を 80% 削減した。
(3)水量計測ユニットの開発
最後は水量計測の自動化となるが、水量については、開
ハイブリッド
流量計
WiFi
第 5 図 揚圧力遠隔計測システム
3
まとめ
発当初より課題が見えていた。まず、水の流量は、水滴が
高根第一ダムに、通信環境を整備し、計測ユニットを 10
ポタポタ滴る程度の少量から、水道の蛇口から流れるよう
台設置し、1 年半の試行を経て、揚圧力計測システムを実
な多量な場所があり、計測箇所、時期や水位により流量が
現した。揚圧力計測システムにより、遠隔地への出向及び
変動する。また、水が泥濁りしており、計器が泥詰まりす
急勾配、濡れた、狭いといった現場での作業を排除した。
る可能性がある。これらの条件下でも利用できる、水量計
また、丸一日かかっていた計測業務を、ほぼ 0 時間に短縮
測装置の開発が必要であった。
することができた。
水滴程度のポタポタの流量は、通常の羽根車式流量計で
さらに、揚圧力計測の自動化にて大量データが取得でき
は測れないため、転倒マス方式を用いた「雨量計」で計
るようになり、それらを活用した業務の合理化も期待でき
測する。水道の蛇口から流れるような場合にも対応するた
る。合理化の具体例としては、計測ポイントの削減、計測
め、通常の「流量計」も併用することで、幅広い流量範囲
頻度の適正化等である。
に対応した。泥詰まりは避けることはできないと考えてお
り、分解清掃が可能な構造を設計し、清掃運用で回避する
予定である。( 第 4 図 )
水量計測ユニットを開発することで、現場での計測作業
4
今後の展開
を 100% 削減することができる。水量計測ユニットについ
今後は、愛知の一部ダムから本格導入を開始し、水量計
ては、2024 年度より現地試行の予定である。
測ユニットはそこで現地試行する。2025 年度以降は、全
社展開の予定である。これまでに培った技術を活かし、今
後は社内だけでなく社会全体にも貢献していきたいと考え
ている。
技術開発ニュース 2025.03/No.169
74
�
- ▲TOP
- ページ: 75
-
研 究 紹 介
Introductions of Research Activities
複数カメラによる複数物体追跡技術
Multi-camera Multi-object Tracking Technology
物・人の動きを価値ある情報へと変換するために
カメラで取得した画像や動画を価値ある情報へと変換する、情報処理技術のニーズが高
まっている。その中でも、物体追跡技術は、動画内の対象(物・人)の動きを把握するこ
とができるものである。本稿では、名城大学との共同研究により進めている、複数カメラ
による複数物体追跡技術について紹介する。
執筆者
先端技術応用研究所
情報技術グループ
加藤 直樹
1
画から、車両の動きのある部分を自動抽出したものを、対
研究の背景・目的
象データとして収集した。
また、ドローンを用いて、駐車場を真上から見下ろす鳥
生活や仕事のあらゆる場面でスマート化や DX が求めら
瞰画像を取得した。これは、各カメラの画像を鳥瞰画像に
れる中、カメラで取得した画像や動画を価値ある情報へと
変換し、位置関係を統合するために用いる。
変換する、情報処理技術のニーズが高まっている。その中
(2) アルゴリズムの検討・評価
でも、物体追跡技術は、動画内の対象(物・人)の動きを
Step1: 物体検出
把握することができるため、盛んに研究されている。
対象データの動画を構成する各画像(フレーム)から、
本研究では、複数カメラによる複数物体追跡技術(第 1
物体検出 AI を用いて車両を検出し、その位置を特定する。
図)をターゲットとした。複数カメラを用いることで、1
既存手法である YoloX [1] による物体検出を実施し、リ
台のカメラに限定される場合と比べて、より広く、柔軟な
アルタイムに処理可能であることなどを確認し、実用に向
画角で、対象の重なりを補完するよう動画を取得すること
けた見通しを得た。一方で、車両の検出精度については、
ができる。一方で、複数カメラに同じ対象が撮影された場
改善の余地が残っている。
合、重複して認識してしまうため、それらを同じ対象だと
認識・統合する技術が必要である。
Step2: 位置変換
企業の従業員駐車場をユースケースに、車両がどの駐車
各カメラの画像を統合するために、検出した車両の位置
スペースに停車したかを自動認識するタスクに取組んだ。
(=画像の中での座標)を、鳥瞰画像を用いた駐車場内の
位置(=実世界での座標)へと変換する(第 2 図)。
2
研究の特長
任意の位置に複数のカメラを設置すると、カメラの位置
や画角の違いを自動的に考慮して、物体追跡を実現するア
ルゴリズムを目指した。なお、本内容は、名城大学理工学
部電気電子工学科堀田研究室との共同研究にて実施した。
(1) データの収集
技術開発本部の従業員駐車場に 3 台のカメラを設置し、
動画を取得した。様々な時刻、曜日、天気、季節を含む動
第 1 図 複数カメラによる物体追跡のイメージ
75
技術開発ニュース 2025.03/No.169
第 2 図 鳥瞰画像への変換
�
- ▲TOP
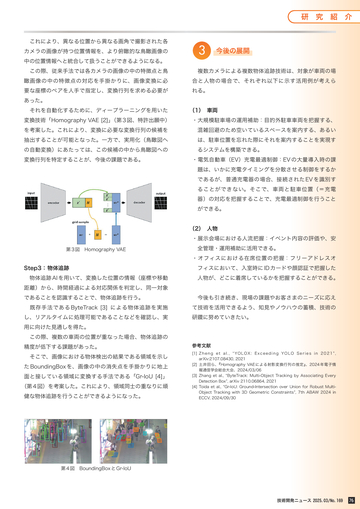
- ページ: 76
-
研 究 紹 介
これにより、異なる位置から異なる画角で撮影された各
カメラの画像が持つ位置情報を、より俯瞰的な鳥瞰画像の
中の位置情報へと統合して扱うことができるようになる。
3
今後の展開
この際、従来手法では各カメラの画像の中の特徴点と鳥
複数カメラによる複数物体追跡技術は、対象が車両の場
瞰画像の中の特徴点の対応を手掛かりに、画像変換に必
合と人物の場合で、それぞれ以下に示す活用例が考えら
要な座標のペアを人手で指定し、変換行列を求める必要が
れる。
あった。
それを自動化するために、ディープラーニングを用いた
変換技術「Homography VAE [2]」(第 3 図、特許出願中)
(1) 車両
・大規模駐車場の運用補助:目的外駐車車両を把握する、
を考案した。これにより、変換に必要な変換行列の候補を
混雑回避のため空いているスペースを案内する、あるい
抽出することが可能となった。一方で、実用化(鳥瞰図へ
は、駐車位置を忘れた際にそれを案内することを実現す
の自動変換)にあたっては、この候補の中から鳥瞰図への
るシステムを構築できる。
変換行列を特定することが、今後の課題である。
・電気自動車(EV)充電最適制御:EV の大量導入時の課
題は、いかに充電タイミングを分散させる制御をするか
であるが、普通充電器の場合、接続された EV を識別す
ることができない。そこで、車両と駐車位置(=充電
器)の対応を把握することで、充電最適制御を行うこと
ができる。
(2) 人物
・展示会場における人流把握:イベント内容の評価や、安
第 3 図 Homography VAE
全管理・運用補助に活用できる。
・オフィスにおける在席位置の把握:フリーアドレスオ
Step3: 物体追跡
フィスにおいて、入室時に ID カードや顔認証で把握した
物体追跡 AI を用いて、変換した位置の情報(座標や移動
人物が、どこに着席しているかを把握することができる。
距離)から、時間経過による対応関係を判定し、同一対象
であることを認識することで、物体追跡を行う。
今後も引き続き、現場の課題やお客さまのニーズに応え
既存手法である ByteTrack [3] による物体追跡を実施
て技術を活用できるよう、知見やノウハウの蓄積、技術の
し、リアルタイムに処理可能であることなどを確認し、実
研鑽に努めていきたい。
用に向けた見通しを得た。
この際、複数の車両の位置が重なった場合、物体追跡の
精度が低下する課題があった。
そこで、画像における物体検出の結果である領域を示し
た BoundingBox を、画像の中の消失点を手掛かりに地上
面と接している領域に変換する手法である「Gr-IoU [4]」
(第 4 図)を考案した。これにより、領域同士の重なりに頑
健な物体追跡を行うことができるようになった。
参考文献
[1] Z h e n g e t a l . , “ YO L OX : E x c e e d i n g YO L O S e r i e s i n 2 0 2 1 ” ,
arXiv:2107.08430, 2021
[2] 土井田ら、
『Homography VAE による射影変換行列の推定』
、2024 年電子情
報通信学会総合大会、2024/03/06
[3] Zhang et al., “ByteTrack: Multi-Object Tracking by Associating Every
Detection Box”, arXiv 2110.06864, 2021
[4] Toida et al., “Gr-IoU: Ground-Intersection over Union for Robust MultiObject Tracking with 3D Geometric Constraints”, 7th ABAW 2024 in
ECCV, 2024/09/30
第 4 図 BoundingBox と Gr-IoU
技術開発ニュース 2025.03/No.169
76
�
- ▲TOP
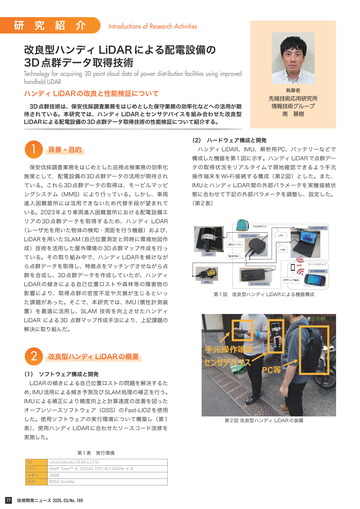
- ページ: 77
-
研 究 紹 介
Introductions of Research Activities
改良型ハンディ LiDAR による配電設備の
3D 点群データ取得技術
Technology for acquiring 3D point cloud data of power distribution facilities using improved
handheld LiDAR
執筆者
ハンディ LiDAR の改良と性能検証について
先端技術応用研究所
情報技術グループ
南 基樹
3D 点群技術は、保安伐採調査業務をはじめとした保守業務の効率化などへの活用が期
待されている。本研究では、ハンディ LiDAR とセンサデバイスを組み合わせた改良型
LiDAR による配電設備の 3D 点群データ取得技術の性能検証について紹介する。
1
背景・目的
(2) ハードウェア構成と開発
ハンディ LiDAR、IMU、解析用 PC、バッテリーなどで
構成した機器を第 1 図に示す。ハンディ LiDAR で点群デー
保安伐採調査業務をはじめとした巡視点検業務の効率化
タの取得状況をリアルタイムで現地確認できるよう手元
施策として,配電設備の 3D 点群データの活用が期待され
操作端末を Wi-Fi 接続する構成(第 2 図)とした。また、
ている。これら 3D 点群データの取得は、モービルマッピ
IMU とハンディ LiDAR 間の外部パラメータを実機接続状
ングシステム(MMS)により行っている。しかし、車両
進入困難箇所には活用できないため代替手段が望まれて
態に合わせて下記の外部パラメータを調整し、設定した。
(第 2 表)
いる。2023 年より車両進入困難箇所における配電設備エ
リアの 3D 点群データを取得するため、ハンディ LiDAR
(レーザ光を用いた物体の検知・測距を行う機器)および、
LiDAR を用いた SLAM(自己位置測定と同時に環境地図作
成)技術を活用した屋外環境の 3D 点群マップ作成を行っ
ている。その取り組み中で、ハンディ LiDAR を傾けなが
ら点群データを取得し、特徴点をマッチングさせながら点
群を合成し、3D 点群データを作成していたが、ハンディ
LiDAR の傾きによる自己位置ロストや森林等の障害物の
影響により、取得点群の密度不足や欠損が生じるといっ
た課題があった。そこで、本研究では、IMU(慣性計測装
第 1 図 改良型ハンディ LiDAR による機器構成
置)を最適に活用し、SLAM 技術を向上させたハンディ
LiDAR による 3D 点群マップ作成手法により、上記課題の
解決に取り組んだ。
2
改良型ハンディ LiDAR の概要
(1) ソフトウェア構成と開発
手元操作端末
センサデバイス
PC等
LiDAR の傾きによる自己位置ロストの問題を解決するた
め、IMU 活用による傾き予測及び SLAM 処理の補正を行う。
IMU による補正により精度向上と計算速度の改善を図った
オープンソースソフトウェア(OSS)の Fast-LIO2 を使用
した。使用ソフトウェアの実行環境について構築し(第 1
表)、使用ハンディ LiDAR に合わせたソースコード改修を
実施した。
第 1 表 実行環境
OS
CPU
メモリ
ROS
77
Linux(Ubuntu 22.04.5 LTS)
Intel® Core™ i5-1035G1 CPU @ 1.00GHz × 8
16GB
ROS2 humble
技術開発ニュース 2025.03/No.169
第 2 図 改良型ハンディ LiDAR の装備
�
- ▲TOP
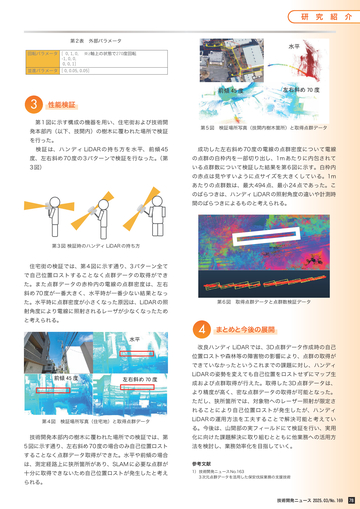
- ページ: 78
-
研 究 紹 介
第 2 表 外部パラメータ
回転パラメータ [ 0, 1, 0,
-1, 0, 0,
0, 0, 1]
水平
※z軸上の状態で270度回転
並進パラメータ [ 0, 0.05, 0.05]
前傾 45 度
3
左右斜め 70 度
性能検証
第 1 図に示す構成の機器を用い、住宅街および技術開
発本部内(以下、技開内)の樹木に覆われた場所で検証
第 5 図 検証場所写真(技開内樹木箇所)と取得点群データ
を行った。
検証は、ハンディ LiDAR の持ち方を水平、前傾 45
成功した左右斜め 70 度の電線の点群密度について電線
度、左右斜め 70 度の 3 パターンで検証を行なった。
(第
の点群の白枠内を一部切り出し、1m あたりに内包されて
3 図)
いる点群数について検証した結果を第 6 図に示す。白枠内
の赤点は見やすいように点サイズを大きくしている。1m
あたりの点群数は、最大 494 点、最小 24 点であった。こ
のばらつきは、ハンディ LiDAR の照射角度の違いや計測時
間のばらつきによるものと考えられる。
第 3 図 検証時のハンディ LiDAR の持ち方
住宅街の検証では、第 4 図に示す通り、3 パターン全て
で自己位置ロストすることなく点群データの取得ができ
た。また点群データの赤枠内の電線の点群密度は、左右
斜め 70 度が一番大きく、水平時が一番少ない結果となっ
た。水平時に点群密度が小さくなった原因は、LiDAR の照
第 6 図 取得点群データと点群数検証データ
射角度により電線に照射されるレーザが少なくなったため
と考えられる。
水平
4
まとめと今後の展開
改良ハンディ LiDAR では、3D 点群データ作成時の自己
位置ロストや森林等の障害物の影響により、点群の取得が
できていなかったというこれまでの課題に対し、ハンディ
前傾 45 度
左右斜め 70 度
LiDAR の姿勢を変えても自己位置をロストせずにマップ生
成および点群取得が行えた。取得した 3D 点群データは、
より精度が高く、密な点群データの取得が可能となった。
ただし、狭所箇所では、対象物へのレーザー照射が限定さ
れることにより自己位置ロストが発生したが、ハンディ
第 4 図 検証場所写真(住宅地)と取得点群データ
LiDAR の運用方法を工夫することで解決可能と考えてい
技術開発本部内の樹木に覆われた場所での検証では、第
化に向けた課題解決に取り組むとともに他業務への活用方
5 図に示す通り、左右斜め 70 度の場合のみ自己位置ロスト
法を検討し、業務効率化を目指していく。
る。今後は、山間部の実フィールドにて検証を行い、実用
することなく点群データ取得ができた。水平や前傾の場合
は、測定経路上に狭所箇所があり、SLAM に必要な点群が
十分に取得できないため自己位置ロストが発生したと考え
られる。
参考文献
1) 技術開発ニュース No.163
3 次元点群データを活用した保安伐採業務の支援技術
技術開発ニュース 2025.03/No.169
78
�
- ▲TOP
- ページ: 79
-
内 外 ニ ュ ース
Internal and External News
2024 年度技術研究開発賞選考発表会および
第 77 回中部電力技術研究発表会 開催
2024 年 11 月 21 日(木)、「2024 年度技術研究開発賞
また、本日は社外の先生方や、普段はあまり交流のない
選考発表会(以下、開発賞)」および「第 77 回中部電力技
他部門、他事業の仲間も一堂に会しております。さらなる
術研究発表会(以下、発表会)」を開催しました。
イノベーションの種を見つけるためにも、大いに交流し、
開発賞については当社や地域社会または科学技術の進歩
主張し、意見を伺い、技術革新のみならず、新たな価値創
に貢献した研究に対し表彰をもって賞揚し、士気の高揚と
造のためのイノベーションの具現化につながる共創の場と
成果の周知活用を目的に、発表会については技術の向上、
していただきたいと思います。
事業所・部門間の技術交流、ならびに研究意欲の向上を目
当社は、ビジョンの一つに “ 技術開発および多様なアラ
的に、毎年開催しています。(受賞結果は別表参照)
イアンス先との連携・共創 ” を大きな柱として位置付けて
開会にあたり、林社長のご挨拶を野田技術開発本部長が
おります。本日の発表会の場が、お客さまや社会が求める
代読され、『当社を取り巻く事業環境は大きく変化してお
価値を起点に新たなサービスを創出する第一歩となればと
ります。データセンターをはじめとする電力需要の増加に
思っております。』との技術開発に期待するメッセージが
対応した安定供給の問題、国際情勢不安定化によるエネル
伝えられました。
ギーセキュリティの問題、そしてカーボンニュートラルの
閉会式では、野田技術開発本部長から、『自然環境の変
達成。当社はこれらを同時に解決しなければなりません。
化や、保守の人材確保の問題といった事業環境の変化に対
経営ビジョン 2.0 の実現とエネルギーに関するこれらの
し、現場の若いみなさんが、これまでの考え方を踏襲する
問題を同時に解決するためには、技術力の向上とイノベー
だけでなく、新しい着眼点をもって、積極的に取り組んで
ションが必要です。
いただきました。みなさんの課題を見つけ、解決する姿勢
イノベーションの提唱者であるヨーゼフ・シュンペー
に敬意を表するとともに、引き続き一層、活動の幅を広げ
ターによればイノベーションとは “ 新結合 ”、“ 新機軸 ”、
ていただきたい。当社を取り巻く事業環境の変化への対応
“ 新しい切り口 ”、“ 新しい捉え方 ”、“ 新しい活用法 ” を創造
にはイノベーションが必要です。発表者のみなさんの取り
することにより、新たな価値を生み出し、社会的に大きな
組みは将来のイノベーションに繋がっていくものと考えて
変化をもたらすことです。これはまさしく当社が目指す方
います。技術開発本部としても、これからも継続して技術
向性と一致していると私は考えております。
力向上に取り組むと同時に、研究を行われる皆様への支援
これらのことも踏まえ、みなさんご存じのとおり、本年
を進めてまいります』との講評をいただきました。
は 2030 年をターゲットとした経営ビジョン 2.0 実現のた
今年も多くの皆さまのご協力により、無事に開催できま
めに、2023 年度までの実績を振り返り、中間地点として
した。ご協力ありがとうございました。
2025 年度までの中期経営目標を見直しており、この目標
の達成に向けて更に尽力して参りたいと考えております。
本日の各発表会は、グループ全体の経営、あるいは地域
社会に貢献した技術研究・開発や、グループ全体の事業に
かかわる科学技術の進歩に貢献した研究だと認められるも
のを発表する場であります。まさしく、イノベーションに
つながる具体的な形、成果を示し、社内のみならず社外に
むけてお知らせする場であります。皆さんの本日までの研
究すなわち技術力の成果を大いに発表し、エネルギー事業
領域において社会に役立つみなさんの取り組みを審査員や
先生方に評価いただき、イノベーションにつなげていただ
きたいと思います。
79
技術開発ニュース 2025.03/No.169
野田技術開発本部長
�
- ▲TOP
- ページ: 80
-
内 外 ニ ュ ース
2024 年度 技術研究開発賞 受賞結果
賞詞名
社長賞
本部長賞
優秀賞
件名
所属
氏名
中部電力株式会社 技術開発本部
電力技術研究所 土木グループ
山田 浩司
阿部 卓也
中部電力株式会社 再生可能エネルギーカンパニー
遠山川水力建設所
大谷 佳之
浜岡原子力発電所の H 断層系の活動性
評価に資する年代指標火山灰の発見
中部電力株式会社 原子力本部
原子力土建部 調査計画グループ
山田 翔太
大南 久紀
森本 拓也
高効率、高出力アルミ反射ヒータの開発
中部電力ミライズ株式会社 法人営業本部
ソリューションセンター
村田 昂平
中部電力株式会社 技術開発本部
先端技術応用研究所 先端技術ソリューショングループ
中山 浩
中部電力ミライズ株式会社 法人営業本部
ソリューションセンター
青 勇志
立地的制約のある水力発電所における
効率的な排砂形状を有する沈砂池の開発
工場向けゾーン空調システム
「AC Zone」の開発
第 77 回 中部電力技術研究発表会 受賞結果
【ステージ発表の部】
賞詞名
最優秀賞
優秀賞
件名
所属
氏名
中部電力株式会社 技術開発本部
原子力安全技術研究所 地震・津波・防災グループ
渡邊 康介
中部電力株式会社 浜岡原子力発電所
運営基盤部 防災課
松本 利希
地絡保護リレーの整定方法の最適化に
関する研究
中部電力パワーグリッド株式会社
配電部 配電計画グループ
鈴木 泰史
吉江 学
深江 隆之
二軒小屋水力発電所 最大出力付近での
発電機トリップ事象の原因と対策について
中部電力株式会社 再生可能エネルギーカンパニー
静岡水力センター 技術課
小林 新
箱田 倫大
杉本 裕司
中部電力パワーグリッド株式会社
系統運用部 系統技術グループ
林 泰広
中部電力株式会社 再生可能エネルギーカンパニー
飯田水力センター 技術課
和久 僚太
中部電力株式会社 再生可能エネルギーカンパニー
飯田水力センター 平岡水力管理所
熊谷 賢太
中部電力パワーグリッド株式会社 長野支社
長野系統運用センター 給電グループ
等々力健治
富田 竣
中部電力株式会社 技術開発本部
先端技術応用研究所 情報技術グループ
志水 洋
中部電力株式会社 再生可能エネルギーカンパニー
愛知水力センター 技術課
丹羽 奈里
津波発生に伴う微気圧変動の観測を
活用した津波予測手法の開発
泰阜発電所パワースイング現象への
対策に向けたアプローチ
ダム監査廊内の保守業務を DX 化する
揚圧力遠隔計測システムの開発
【ポスターセッションの部】
賞詞名
最優秀賞
優秀賞
件名
所属
氏名
AI による配電設備の劣化判定に関する研究
中部電力パワーグリッド株式会社
エンジニアリングセンター 設備技術グループ
伊藤 遼
赤尾 美香
馬瀬川第一水力発電所 1 号機配管共振
現象の原因解明と防止対策について
中部電力株式会社 再生可能エネルギーカンパニー
岐阜水力センター 飛騨水力管理所
坂井 翔
当社の水保全への取り組み ~社有林の
適正な水源涵養力評価を目指して~
中部電力株式会社 技術開発本部
電力技術研究所 バイオグループ
根津 涼
津田その子
中部電力株式会社 技術開発本部
先端技術応用研究所 EaaS グループ
久保田 潮
志村 欣一
中部電力パワーグリッド株式会社
豊橋支社 地域統括室
山田 哲士
身近なくらしに役立つ情報提供に関する研究
「カテエネ研究所」
無効電力の見える化による配電線切替
検討の DX
技術開発ニュース 2025.03/No.169
80
�
- ▲TOP
- ページ: 81
-
内 外 ニ ュ ース
Internal and External News
技術研究開発 社長賞
技術研究開発 社長賞
技術研究開発 本部長賞
技術研究開発 優秀賞
中部電力技術研究発表会ステージ発表の部 最優秀賞
中部電力技術研究発表会ステージ発表の部 優秀賞
中部電力技術研究発表会ステージ発表の部 優秀賞
81
技術開発ニュース 2025.03/No.169
中部電力技術研究発表会ステージ発表の部 優秀賞
�
- ▲TOP
- ページ: 82
-
内 外 ニ ュ ース
中部電力技術研究発表会ステージ発表の部 優秀賞
中部電力技術研究発表会ポスターセッションの部 最優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
中部電力技術研究発表会ポスターセッションの部 優秀賞
技術開発ニュース 2025.03/No.169
82
�
- ▲TOP
- ページ: 83
-
内 外 ニ ュ ース
Internal and External News
「エコ de ヒート EX」が “ 超 ” ものづくり部品大賞および
省エネ大賞をダブル受賞
先端技術応用研究所 先端技術ソリューション G と中
部電力ミライズ 法人営業本部 ソリューションセンター
が開発した産業用循環加温ヒートポンプ「エコ de ヒート
EX」が、2024 年 “ 超 ” ものづくり部品大賞※ 1 および 2024
年度省エネ大賞※ 2 を受賞しました。(ファインマシーンカ
タオカ株式会社および株式会社ディグリーとの共同受賞)
主に工場の機械部品洗浄工程の熱源として、高効率な温
水ヒートポンプを開発し、工程の大幅な CO2 排出量、エネ
ルギー消費、コストの削減に寄与したことが高く評価され
開発者の中山さん(左)と小野木さん(右)
たものです。
※ 1 モノづくり日本会議および株式会社日刊工業新聞社
主催
※ 2 一般財団法人省エネルギーセンター主催
省エネ大賞表彰式に出席した関係者
電気学会 第 55 回電気電子絶縁材料シンポジウムで
「矢作賞」を受賞
電気学会 A 部門傘下の誘電・絶縁材料技術委員会主催の
力会議(CIGRE)WG メンバーとして活躍した点が評価さ
第 55 回電気電子絶縁材料システムシンポジウムで電力技
れ、受賞に至りました。
術研究所 電力品質 G・電力設備 G 内田 克己さんが技術
貢献賞「矢作賞」を受賞しました。
本賞は第 30 回シンポジウムより設けられた当該分野の
先駆者ご三名のお一人である早稲田大学故矢作先生の名前
を冠した賞で、製品・装置、製造や測定に関する方法・技
術、材料等の開発・改良および規格類の整備・制定等を
通じて産業界への貢献が著しい方に与えられる賞です。な
お、今回の受賞は電力業界では初受賞となります。同賞と
並び、学術的に貢献が著しい大学や研究所の方は同じく学
術貢献賞「家田賞」、「犬石賞」が授与されます。
内田さんは、特別高圧 CV ケーブルの絶縁劣化診断や余
寿命評価に関する技術開発などの技術的貢献とともに、電
気学会の絶縁・ケーブル関係調査専門委員会や国際大電
83
技術開発ニュース 2025.03/No.169
矢作賞を受賞した内田さん
�
- ▲TOP

- ページ: 84
-
内 外 ニ ュ ース
土木学会「河川技術論文賞」を受賞
2024 年 6 月 20 日に土木学会「令和 5 年度 河川技術論
現場へ適用され、効果が期待されています。
文賞」の表彰式が開催され、技術開発本部 電力技術研究所
土木 G 山田 浩司さん、東京支社(元 安倍川水力建設所)
竹中 慶さんが受賞しました。本賞は、河川技術の進歩や分
野を超えた展開・普及に向けて顕著な貢献があると認めら
れるものに対し、公益社団法人 土木学会から表彰されるも
のです。
受賞論文は「取水口堆砂軽減のための排砂促進手法~三
次元河床変動解析による合理的設計~」で、ダムの取水口
に土砂が堆積・流入することで設備の埋没や水車摩耗など
の障害が生じる課題に対し、リスク低減につながる排砂促
進手法を提案し、土木技術の高度化に貢献したことが評価
されました。また、この論文で発表した研究成果は実際の
左から技術開発本部長の野田さん、受賞者の山田さん、竹中さん
低温工学・超電導学会「論文賞(技術)」を受賞
5 月に開催された 2024 年度春季第 107 回低温工学・超
現在は、750kW 級の実証用超電導加熱装置を開発してお
電導学会において、褒賞の授賞式が執り行われ、電力技術
り、受賞論文の知見を、機器の商用化に活用しています。
研究所 電力品質 G の渡部 智則さんが論文賞(技術)を受
賞しました。(テラル株式会社、新潟大学、産業技術総合
研究所と共同開発)
論文賞は、前年もしくは前前年に学会に発表された論文
の中で、原則として最優秀 1 論文に贈呈される賞です。
対象論文は、「高温超電導マグネットを用いたアルミ押
出成形用 400kW 級直流誘導加熱装置の開発-連続繰り返
し加熱試験と高温超電導マグネットの健全性評価-」で、
論文賞の選考理由として、新たな超電導応用製品の登場が
待望される中、アルミビレット加熱の装置の実用化に向け
た開発の推進と有用な知見を得たことが評価されました。
論文賞(技術)を受賞した渡部さん
「名古屋 Factory InnoVation Week2024」に出展
2024 年 10 月 23 日~ 25 日の 3 日間、先端技術応用研究
とに驚いた」、「このプラットフォームの共創パートナーに
所は、ポートメッセなごやで開催された「名古屋 Factory
なりたい」など、多くの反響をいただきました。
Innovation Week2024」で、製造業におけるデジタル化
の実現を図る 「名古屋 スマート工場 EXPO」 に出展しま
した。
中部電力が中部地域のものづくり産業と取り組む「デジ
タルによるものづくり共創プラットフォーム構築」をテー
マに、自作の製造模擬装置を仮想空間で 3 次元化し、同日
開催のテクノフェア 2024 と相互連携したデジタルツイン
の事例を紹介しました。
3 日間合計で 1,700 名を超えるお客さまがご来場いただ
き、各研究員から説明を受けたお客さまからは、
「製造業
ではない中部電力がこのような分野の研究を行っているこ
事例を紹介する先端技術応用研究所の森田さん
技術開発ニュース 2025.03/No.169
84
�
- ▲TOP
- ページ: 85
-
内 外 ニ ュ ース
Internal and External News
「中部電力オープンイノベーション 2024」共創パートナーを募集
2024 年 9 月 13 日、先端技術応用研究所は、株式会社
けモノづくり共創プラットフォームの実現」と、「エネマ
eiicon が運営するオープンイノベーション基盤「AUBA」
ネを中心とした強固なレジリエンスを有するまちづくり」
を活用して、共同研究開発で新たな価値の創出を目指す共
の 2 件で、スタートアップ企業など 70 社を超える企業か
創パートナーを広く募集しました。先端技術応用研究所が
らの応募がありました。書面および面談審査を経て、製造
オープンイノベーションを実施するのは、今回が初めての
業の課題解決を支援する企業とまちづくりに関わる企業を
試みです。
各 1 社選出し、PoC 検証などの実施に向けた取り組みを開
募集テーマは、「デジタルを活用した中堅・中小企業向
始しました。
「テクノフェア 2024」を開催
当社は、2024 年 10 月 24、25 日の 2 日間、お客さまに
決」に関する技術研究開発を中心に、最新の研究成果や要
いただくため、「テクノフェア 2024」を開催しました。
会場では、実機・実演展示を中心に約 70 展示をご紹介
当社グループの技術開発研究への取り組みをご紹介させて
昨年に引き続き、当社経営ビジョン 2.0 の実現に向け設
定した 7 つの重点分野である「再生可能エネルギーの拡
大」、「水素・アンモニアのサプライチェーン構築」、「原子
力発電の最大限活用」、「エネルギープラットフォームに
よる価値提供」、「データプラットフォームによる価値提
供」、「お客さまとの接点拡大・価値提供」、「資源循環事業
の展開」や、従来からの研究テーマである「現場課題の解
素技術を展示しました。
し、2 日間で 2,200 名以上のお客さまにご来場いただきま
した。
各研究員の説明を受けたご来場者からは、「技術の豊富
さに驚かされました」、「電気関係に限らず幅広いカーボン
ニュートラルに関する取り組みをしていることに感銘を受
けました」といった期待や応援が込められた多くの反響を
いただきました。
「テクノフェア 2024」の様子
85
浮体式洋上風力や波力発電に関する取り組み
簡易に増設できる De-NOx 技術の開発
産業分野での水素燃焼器の開発
浜岡高経年化対応研究
浜岡 1、2 号機の廃止措置
PV・BEV・蓄電池・負荷設備をリソースとしたEMS の開発
ミニチュア電力設備によるマイクログリッド模擬試験
3 次元映像生成 AI の研究
セメント低減コンクリート柱
技術開発ニュース 2025.03/No.169
�
- ▲TOP
- ページ: 86
- 内 外 ニ ュ ース
美味しい干芋づくりの乾燥技術
隔離栽培による持続可能な切り花生産
若手研究員
「テクノフェア」の展示内容は、当社ホームページからご覧いただけます。
https://www.chuden.co.jp/seicho_kaihatsu/kaihatsu/techno/techno_webtenzikai2024/
技術開発ニュースバックナンバー
「技術開発ニュース」は技術開発ニュースライブラリーサイトからもご覧いただけます。
https://www.chuden.co.jp/seicho_kaihatsu/kaihatsu/news/
お問い合わせフォーム
当社の開放特許や研究内容に関するお問い合わせはこちらからご連絡ください。
※本誌掲載情報の著作権は当社に帰属します。
転載を希望する場合は、その旨を必ずご連絡ください(無断転載禁止)。
https://www.chuden.co.jp/faq/inquiry/inq_kenkyu/
技術開発ニュース 2025.03/No.169
86
�
- ▲TOP
- ページ: 88
- 技術開発ニュース 169 号
【発 行】
2025 年 3 月
【発行所】
中部電力株式会社
技術開発本部 技術企画室 総務・広報グループ
〒 459-8522 名古屋市緑区大高町字北関山 20 - 1
【特集制作】 西川コミュニケーションズ株式会社
【編集所】
〒 461-0005 名古屋市東区東桜 2-11-16 西川ビル
株式会社プラン・エディターズ
〒 462-0042 名古屋市北区水草町 1-68-2
�
- ▲TOP