技術開発ニュース No.169
- ページ: 76
-
研 究 紹 介
これにより、異なる位置から異なる画角で撮影された各
カメラの画像が持つ位置情報を、より俯瞰的な鳥瞰画像の
中の位置情報へと統合して扱うことができるようになる。
3
今後の展開
この際、従来手法では各カメラの画像の中の特徴点と鳥
複数カメラによる複数物体追跡技術は、対象が車両の場
瞰画像の中の特徴点の対応を手掛かりに、画像変換に必
合と人物の場合で、それぞれ以下に示す活用例が考えら
要な座標のペアを人手で指定し、変換行列を求める必要が
れる。
あった。
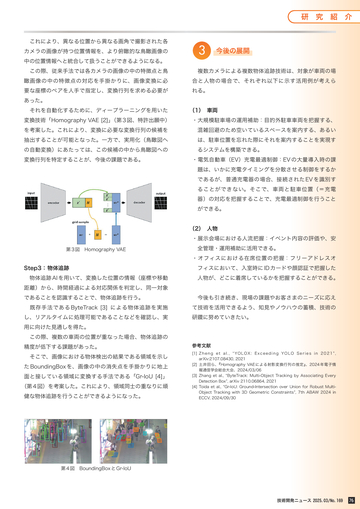
それを自動化するために、ディープラーニングを用いた
変換技術「Homography VAE [2]」(第 3 図、特許出願中)
(1) 車両
・大規模駐車場の運用補助:目的外駐車車両を把握する、
を考案した。これにより、変換に必要な変換行列の候補を
混雑回避のため空いているスペースを案内する、あるい
抽出することが可能となった。一方で、実用化(鳥瞰図へ
は、駐車位置を忘れた際にそれを案内することを実現す
の自動変換)にあたっては、この候補の中から鳥瞰図への
るシステムを構築できる。
変換行列を特定することが、今後の課題である。
・電気自動車(EV)充電最適制御:EV の大量導入時の課
題は、いかに充電タイミングを分散させる制御をするか
であるが、普通充電器の場合、接続された EV を識別す
ることができない。そこで、車両と駐車位置(=充電
器)の対応を把握することで、充電最適制御を行うこと
ができる。
(2) 人物
・展示会場における人流把握:イベント内容の評価や、安
第 3 図 Homography VAE
全管理・運用補助に活用できる。
・オフィスにおける在席位置の把握:フリーアドレスオ
Step3: 物体追跡
フィスにおいて、入室時に ID カードや顔認証で把握した
物体追跡 AI を用いて、変換した位置の情報(座標や移動
人物が、どこに着席しているかを把握することができる。
距離)から、時間経過による対応関係を判定し、同一対象
であることを認識することで、物体追跡を行う。
今後も引き続き、現場の課題やお客さまのニーズに応え
既存手法である ByteTrack [3] による物体追跡を実施
て技術を活用できるよう、知見やノウハウの蓄積、技術の
し、リアルタイムに処理可能であることなどを確認し、実
研鑽に努めていきたい。
用に向けた見通しを得た。
この際、複数の車両の位置が重なった場合、物体追跡の
精度が低下する課題があった。
そこで、画像における物体検出の結果である領域を示し
た BoundingBox を、画像の中の消失点を手掛かりに地上
面と接している領域に変換する手法である「Gr-IoU [4]」
(第 4 図)を考案した。これにより、領域同士の重なりに頑
健な物体追跡を行うことができるようになった。
参考文献
[1] Z h e n g e t a l . , “ YO L OX : E x c e e d i n g YO L O S e r i e s i n 2 0 2 1 ” ,
arXiv:2107.08430, 2021
[2] 土井田ら、
『Homography VAE による射影変換行列の推定』
、2024 年電子情
報通信学会総合大会、2024/03/06
[3] Zhang et al., “ByteTrack: Multi-Object Tracking by Associating Every
Detection Box”, arXiv 2110.06864, 2021
[4] Toida et al., “Gr-IoU: Ground-Intersection over Union for Robust MultiObject Tracking with 3D Geometric Constraints”, 7th ABAW 2024 in
ECCV, 2024/09/30
第 4 図 BoundingBox と Gr-IoU
技術開発ニュース 2025.03/No.169
76
�
- ▲TOP