技術開発ニュース No.169
- ページ: 77
-
研 究 紹 介
Introductions of Research Activities
改良型ハンディ LiDAR による配電設備の
3D 点群データ取得技術
Technology for acquiring 3D point cloud data of power distribution facilities using improved
handheld LiDAR
執筆者
ハンディ LiDAR の改良と性能検証について
先端技術応用研究所
情報技術グループ
南 基樹
3D 点群技術は、保安伐採調査業務をはじめとした保守業務の効率化などへの活用が期
待されている。本研究では、ハンディ LiDAR とセンサデバイスを組み合わせた改良型
LiDAR による配電設備の 3D 点群データ取得技術の性能検証について紹介する。
1
背景・目的
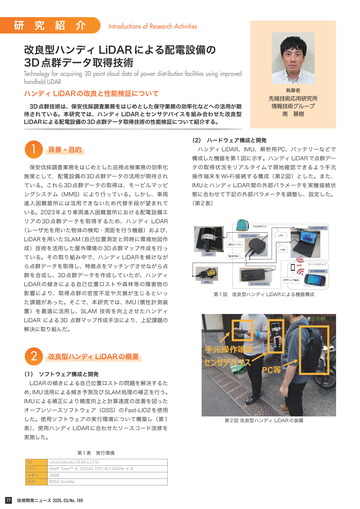
(2) ハードウェア構成と開発
ハンディ LiDAR、IMU、解析用 PC、バッテリーなどで
構成した機器を第 1 図に示す。ハンディ LiDAR で点群デー
保安伐採調査業務をはじめとした巡視点検業務の効率化
タの取得状況をリアルタイムで現地確認できるよう手元
施策として,配電設備の 3D 点群データの活用が期待され
操作端末を Wi-Fi 接続する構成(第 2 図)とした。また、
ている。これら 3D 点群データの取得は、モービルマッピ
IMU とハンディ LiDAR 間の外部パラメータを実機接続状
ングシステム(MMS)により行っている。しかし、車両
進入困難箇所には活用できないため代替手段が望まれて
態に合わせて下記の外部パラメータを調整し、設定した。
(第 2 表)
いる。2023 年より車両進入困難箇所における配電設備エ
リアの 3D 点群データを取得するため、ハンディ LiDAR
(レーザ光を用いた物体の検知・測距を行う機器)および、
LiDAR を用いた SLAM(自己位置測定と同時に環境地図作
成)技術を活用した屋外環境の 3D 点群マップ作成を行っ
ている。その取り組み中で、ハンディ LiDAR を傾けなが
ら点群データを取得し、特徴点をマッチングさせながら点
群を合成し、3D 点群データを作成していたが、ハンディ
LiDAR の傾きによる自己位置ロストや森林等の障害物の
影響により、取得点群の密度不足や欠損が生じるといっ
た課題があった。そこで、本研究では、IMU(慣性計測装
第 1 図 改良型ハンディ LiDAR による機器構成
置)を最適に活用し、SLAM 技術を向上させたハンディ
LiDAR による 3D 点群マップ作成手法により、上記課題の
解決に取り組んだ。
2
改良型ハンディ LiDAR の概要
(1) ソフトウェア構成と開発
手元操作端末
センサデバイス
PC等
LiDAR の傾きによる自己位置ロストの問題を解決するた
め、IMU 活用による傾き予測及び SLAM 処理の補正を行う。
IMU による補正により精度向上と計算速度の改善を図った
オープンソースソフトウェア(OSS)の Fast-LIO2 を使用
した。使用ソフトウェアの実行環境について構築し(第 1
表)、使用ハンディ LiDAR に合わせたソースコード改修を
実施した。
第 1 表 実行環境
OS
CPU
メモリ
ROS
77
Linux(Ubuntu 22.04.5 LTS)
Intel® Core™ i5-1035G1 CPU @ 1.00GHz × 8
16GB
ROS2 humble
技術開発ニュース 2025.03/No.169
第 2 図 改良型ハンディ LiDAR の装備
�
- ▲TOP