技術開発ニュース No.169
- ページ: 78
-
研 究 紹 介
第 2 表 外部パラメータ
回転パラメータ [ 0, 1, 0,
-1, 0, 0,
0, 0, 1]
水平
※z軸上の状態で270度回転
並進パラメータ [ 0, 0.05, 0.05]
前傾 45 度
3
左右斜め 70 度
性能検証
第 1 図に示す構成の機器を用い、住宅街および技術開
発本部内(以下、技開内)の樹木に覆われた場所で検証
第 5 図 検証場所写真(技開内樹木箇所)と取得点群データ
を行った。
検証は、ハンディ LiDAR の持ち方を水平、前傾 45
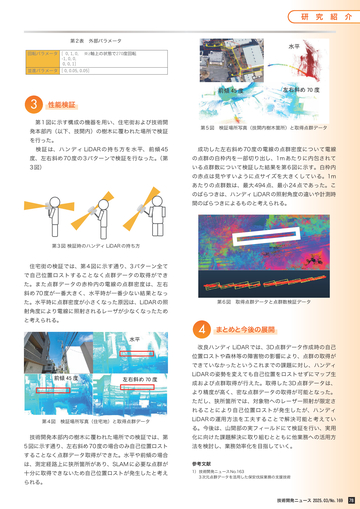
成功した左右斜め 70 度の電線の点群密度について電線
度、左右斜め 70 度の 3 パターンで検証を行なった。
(第
の点群の白枠内を一部切り出し、1m あたりに内包されて
3 図)
いる点群数について検証した結果を第 6 図に示す。白枠内
の赤点は見やすいように点サイズを大きくしている。1m
あたりの点群数は、最大 494 点、最小 24 点であった。こ
のばらつきは、ハンディ LiDAR の照射角度の違いや計測時
間のばらつきによるものと考えられる。
第 3 図 検証時のハンディ LiDAR の持ち方
住宅街の検証では、第 4 図に示す通り、3 パターン全て
で自己位置ロストすることなく点群データの取得ができ
た。また点群データの赤枠内の電線の点群密度は、左右
斜め 70 度が一番大きく、水平時が一番少ない結果となっ
た。水平時に点群密度が小さくなった原因は、LiDAR の照
第 6 図 取得点群データと点群数検証データ
射角度により電線に照射されるレーザが少なくなったため
と考えられる。
水平
4
まとめと今後の展開
改良ハンディ LiDAR では、3D 点群データ作成時の自己
位置ロストや森林等の障害物の影響により、点群の取得が
できていなかったというこれまでの課題に対し、ハンディ
前傾 45 度
左右斜め 70 度
LiDAR の姿勢を変えても自己位置をロストせずにマップ生
成および点群取得が行えた。取得した 3D 点群データは、
より精度が高く、密な点群データの取得が可能となった。
ただし、狭所箇所では、対象物へのレーザー照射が限定さ
れることにより自己位置ロストが発生したが、ハンディ
第 4 図 検証場所写真(住宅地)と取得点群データ
LiDAR の運用方法を工夫することで解決可能と考えてい
技術開発本部内の樹木に覆われた場所での検証では、第
化に向けた課題解決に取り組むとともに他業務への活用方
5 図に示す通り、左右斜め 70 度の場合のみ自己位置ロスト
法を検討し、業務効率化を目指していく。
る。今後は、山間部の実フィールドにて検証を行い、実用
することなく点群データ取得ができた。水平や前傾の場合
は、測定経路上に狭所箇所があり、SLAM に必要な点群が
十分に取得できないため自己位置ロストが発生したと考え
られる。
参考文献
1) 技術開発ニュース No.163
3 次元点群データを活用した保安伐採業務の支援技術
技術開発ニュース 2025.03/No.169
78
�
- ▲TOP