技術開発ニュース No.169
- ページ: 75
-
研 究 紹 介
Introductions of Research Activities
複数カメラによる複数物体追跡技術
Multi-camera Multi-object Tracking Technology
物・人の動きを価値ある情報へと変換するために
カメラで取得した画像や動画を価値ある情報へと変換する、情報処理技術のニーズが高
まっている。その中でも、物体追跡技術は、動画内の対象(物・人)の動きを把握するこ
とができるものである。本稿では、名城大学との共同研究により進めている、複数カメラ
による複数物体追跡技術について紹介する。
執筆者
先端技術応用研究所
情報技術グループ
加藤 直樹
1
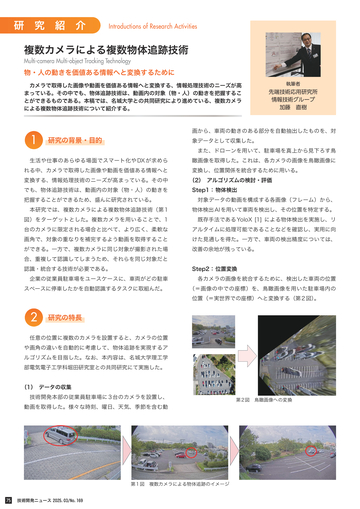
画から、車両の動きのある部分を自動抽出したものを、対
研究の背景・目的
象データとして収集した。
また、ドローンを用いて、駐車場を真上から見下ろす鳥
生活や仕事のあらゆる場面でスマート化や DX が求めら
瞰画像を取得した。これは、各カメラの画像を鳥瞰画像に
れる中、カメラで取得した画像や動画を価値ある情報へと
変換し、位置関係を統合するために用いる。
変換する、情報処理技術のニーズが高まっている。その中
(2) アルゴリズムの検討・評価
でも、物体追跡技術は、動画内の対象(物・人)の動きを
Step1: 物体検出
把握することができるため、盛んに研究されている。
対象データの動画を構成する各画像(フレーム)から、
本研究では、複数カメラによる複数物体追跡技術(第 1
物体検出 AI を用いて車両を検出し、その位置を特定する。
図)をターゲットとした。複数カメラを用いることで、1
既存手法である YoloX [1] による物体検出を実施し、リ
台のカメラに限定される場合と比べて、より広く、柔軟な
アルタイムに処理可能であることなどを確認し、実用に向
画角で、対象の重なりを補完するよう動画を取得すること
けた見通しを得た。一方で、車両の検出精度については、
ができる。一方で、複数カメラに同じ対象が撮影された場
改善の余地が残っている。
合、重複して認識してしまうため、それらを同じ対象だと
認識・統合する技術が必要である。
Step2: 位置変換
企業の従業員駐車場をユースケースに、車両がどの駐車
各カメラの画像を統合するために、検出した車両の位置
スペースに停車したかを自動認識するタスクに取組んだ。
(=画像の中での座標)を、鳥瞰画像を用いた駐車場内の
位置(=実世界での座標)へと変換する(第 2 図)。
2
研究の特長
任意の位置に複数のカメラを設置すると、カメラの位置
や画角の違いを自動的に考慮して、物体追跡を実現するア
ルゴリズムを目指した。なお、本内容は、名城大学理工学
部電気電子工学科堀田研究室との共同研究にて実施した。
(1) データの収集
技術開発本部の従業員駐車場に 3 台のカメラを設置し、
動画を取得した。様々な時刻、曜日、天気、季節を含む動
第 1 図 複数カメラによる物体追跡のイメージ
75
技術開発ニュース 2025.03/No.169
第 2 図 鳥瞰画像への変換
�
- ▲TOP